



В настоящее время значительно возрастает доля высокоскоростных роторных систем для различных машин и агрегатов. Высокоскоростные роторные системы при сохранении массогабаритных показателей имеют более высокие мощности. Высокоскоростные роторные системы используют в энергетических, транспортных, газоперекачивающих турбинах, приборостроении, медицине, ювелирной промышленности и многих других отраслях техники. Однако основным ограничивающим фактором по использованию высокоскоростных роторных систем являются подшипники. Несбалансированность ротора вызывает значительные нагрузки на подшипники, во много раз превышающие статические нагрузки. Однако, даже полностью избавившись от дисбаланса ротора или сведя его к минимуму, нельзя избавиться от динамических сил. Силы вибрационного характера возникают внутри самого подшипника. Поэтому наиболее важно проводить работу по динамическому совершенствованию подшипниковых узлов. Источник возникновения динамических сил в подшипниках зависит от его типа.
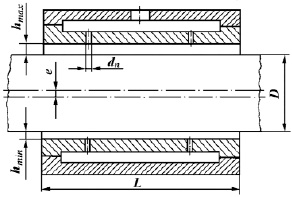
Рис. 1. Конструкция газостатического подшипника
Для высокоскоростных роторных систем используют газовые, жидкостные, магнитные подшипники и подшипники качения. Минимальное сопротивление вращению имеют бесконтактные газовые и магнитные подшипники. Жидкостные подшипники и подшипники качения на высоких скоростях имеют высокие значения потерь на трение, однако они обладают более высокими по сравнению с газовыми и магнитными подшипниками нагружающими способностями. Внимание научно-исследовательских и конструкторских проектов направлено в основном на совершенствование статистических характеристик роторных систем. Конструкторские разработки значительно расширили нагружающие способности, а выбор материалов позволил снизить сопротивление на трение подшипников высокоскоростных роторных систем. При этом применение роторных систем ограничивается в основном динамическими силами подшипников, которые могут принимать значения в несколько раз больше сил статического нагружения [1].
Для активного внедрения высокоскоростных роторных систем необходимо исследование динамических характеристик подшипников. Поэтому разработка методов анализа динамических характеристик роторных систем является важной научной проблемой. Так, например, для повышения точности обработки необходимо снижение виброперемещения шпинделя [2]. При повышении частот вращения ротора важность исследования динамических характеристик резко возрастает. Оценка динамических характеристик роторной системы возможна по пороговому значению вибрации, частоте максимального пика в спектре, превышению параметров дисперсии распределения, параметров вейвлет-преобразования и др.
Основной динамической характеристикой работы бесконтактного подшипника является смещение оси ротора относительно оси подшипника (эксцентриситет) и изменение этого параметра во времени [3] (рис. 1).
Динамические характеристики представляют собой показатели, характеризующие упругие и демпфирующие свойства смазочного слоя газовых или жидкостных опор или системы управления магнитных подшипников. Теоретическое исследование таких характеристик сталкивается на возможности учета всех факторов, влияющих на конечный результат. Подтверждением является изменение динамических характеристик в процессе эксплуатации и возможность тонкой настройки. Более точное определение динамических характеристик возможно при физическом эксперименте.
На демпфирующие способности оказывают влияние конструктивные особенности и режимные параметры подшипников, частота вращения, вид нагрузки и др. Учет всех факторов, влияющих на результат, делает эксперимент длительным и объемным. Предлагается для определения динамических характеристик использовать модальный анализ.
Материалы и методы исследования
Модальный анализ подразделяется на экспериментальный, выполненный с помощью специального оборудования, и аналитический – с использованием конечно-элементного анализа.
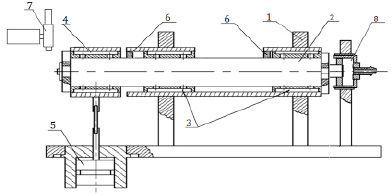
Рис. 2. Стенд исследования динамических характеристик: 1 – основание, 2 – ротор, 3 – исследуемые опоры, 4 – нагрузочный подшипник, 5 – поршень нагружающего устройства, 6 – индуктивные датчики перемещения, 7 – ударный молоток, 8 – турбинный привод
Для высокоскоростных роторных систем невозможно произвести учет всех параметров, влияющих на положение ротора в подшипниках. Аналитический модальный анализ необходим для исследования влияния конструктивных характеристик и режимных параметров работы подшипников на динамические характеристики роторной системы. Учет всех параметров (точностных, геометрических, инерционных и др.) работы роторной системы возможен только с помощью экспериментального исследования.
Для проведения эксперимента был разработан экспериментальный стенд (рис. 2). Исследования проводились на примере ротора на газостатических опорах с консольным нагружением. Консольное нагружение представляет собой более сложную динамическую задачу по сравнению с центральным нагружением. Эксперимент состоит из двух этапов. В первом измеряют реакцию опор на импульсное нагружение с помощью ударного молотка с датчиком силы. Во втором измеряют кривые подвижного равновесия при вращении ротора в газостатических опорах. Обе серии экспериментов проводят при изменении режимных параметров (давления наддува и нагрузки).
Измерительный стенд содержит основание, ротор, опирающийся на исследуемые опоры, нагружающее устройство, передающее усилие через бесконтактный подшипник. Опорами вала служат два газостатических подшипника. В совокупности корпус и подшипники образуют подшипниковую сборку. Силовое замыкание вала осуществляется подпятниками, расположенными по торцам вала.
На исследуемые и нагрузочные подшипники подается сжатый воздух. Нагружающим устройством с помощью давления воздуха на поршень устанавливается значение эксцентриситета передней газостатической опоры. Величина нагружающего устройства контролируется пьезокерамическим датчиком силы, расположенным между нагружающим устройством и нагружающим подшипником.
Массивная форма ротора позволяет не учитывать изгибные и крутильные колебания ротора и в модели считать ротор абсолютно жестким. Для контроля положения вала используются два индуктивных датчика перемещений, закрепленных на стойках подшипника.
В первой серии эксперимента ротор находится в стационарном состоянии, то есть не вращается. Ударным молотком с датчиком силы создается импульсное воздействие на консольно-расположенный конец ротора. Одновременно регистрируется усилие на молотке РН и смещение ротора в опорах x1 (рис. 3). Измерения повторяются для различных значений давлений наддува и эксцентриситета. Достаточно производить измерение сигнала выходной функции перемещений ротора в передней опоре. Перемещение ротора в дальней опоре от нагружения минимально и может приниматься равным нулю. Ротор на бесконтактных подшипниках с консольным нагружением колеблется вокруг неподвижной точки, располагающейся вблизи дальней опоры.
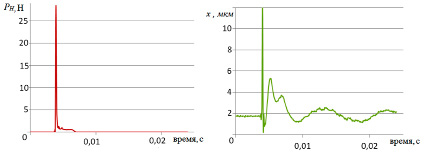
Рис. 3. Графики импульсного нагружения (а) и сигнала перемещения ротора в передних опорах (б)
Конструкция стенда с нагружающим устройством, передаваемым через бесконтактные подшипники, позволяет исключить влияние демпфирующих свойств передающего нагрузку устройства. Бесконтактные подшипники создают усилия, распределяемые равномерно по поверхности вала. Для передачи импульсного нагружения используют поверхность вала, на котором закрепляют аэростатический подпятник. Длительность импульсного воздействия составляет менее 5 мкс. Кратковременность импульсного воздействия не позволяет создать демпфирующее воздействие от контакта.
Как видно из графиков сигнала перемещения ротора в газостатических опорах (рис. 3, б), сигнал состоит из резкого всплеска перемещения и затухающих колебаний. Разложение затухающих колебаний в ряд Фурье требует значительного числа гармоник и не может считаться достаточно эффективным. Наиболее точно затухающие колебания раскладываются в ряд с помощью специально разработанных функций, например импульса Пузырькова или импульса Берлаге [4], однако значения функций можно заменить значением двух переменных динамической жесткости и динамической вязкости смазочного слоя подшипника. Понятие динамической жесткости представляет собой соотношение силы к ускорению ротора, вызванное импульсным воздействием. Динамическая вязкость необходима для определения скорости затухания колебаний.
Результаты исследования и их обсуждение
По результатам измерений вычисляется передаточная функция. По обобщенным измерениям строится общая передаточная функция с учетом режимных параметров. Обобщенная передаточная функция представляет собой наиболее полное описание динамической характеристики роторных систем, позволяющей характеризовать поведение роторных систем на всех режимах работы (рис. 4).
Во второй серии опытов получают кривые подвижного равновесия ротора при вращении вокруг неподвижной оси. Для этого стенд должен быть дополнен турбинным приводом. Регистрация кривых подвижного равновесия осуществляется при различных нагрузках, создаваемых нагружающим устройством. Под кривой подвижного равновесия понимается траектория оси ротора колеблющейся вокруг неподвижного положения.
Кривая подвижного равновесия измеряется с помощью индуктивных датчиков. Индуктивные датчики при измерении положения ротора указанным способом измеряют расстояние до ротора. При этом в результат измерения входит погрешность формы ротора. Исключают погрешность измерения зачастую установкой на ротор прецизионной оправки, что влияет на вибрационное состояние высокоскоростного ротора. Погрешность измерения может быть исключена вычитанием поправки на форму и структуру материала [5] или измерением вибрации подвижного подшипника согласно методике [6].
На форму кривой подвижного равновесия влияют погрешности формы подшипника и ротора, распределение давления в питающих отверстиях и другие дефекты. При отсутствии дефектов и равномерном распределении давления форма траектории движения оси ротора стремится к окружности или к овалу при статической нагрузке. При дефекте распределения давления или погрешности формы происходит смещение траектории в месте погрешности (рис. 5).
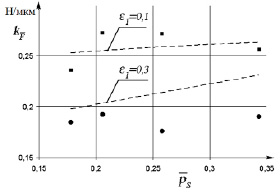
Рис. 4. Зависимость коэффициента жесткости kF от относительного давления наддува ps и относительного эксцентриситета ε1
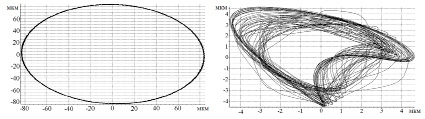
Рис. 5. Формы траекторий кривых подвижного равновесия
При увеличении частоты вращения ротора и нагрузки на ротор вклад динамической составляющей в его динамическое колебание увеличивается, при этом ротор отклоняется к стенкам подшипника. При сокращении зазора смазка приобретает динамическую неуравновешенность и движение ротора происходит по различным фигурам Лиссажу.
Передаточную функцию можно использовать для получения перемещений ротора при любых возмущающих воздействиях. Конечно-элементную модель ротора описывают матричными уравнениями. Для этого необходимо вычислять перемещения в бесконечно малых промежутках времени. Промежуток времени может быть выбран равным длительности импульсного воздействия. Определяют положение ротора в первоначальный момент времени и значения скорости и ускорения движения ротора. В начальных условиях состояние ротора может задаться как стабильное, то есть начальная скорость и ускорение будут равны нулю. Расчет динамических характеристик при вращении ротора требует значительных компьютерных ресурсов, в особенности для высокооборотных роторов. Поэтому требуется разработка методики на основе определения динамических характеристик по экспериментальным параметрам смазочного слоя.
По первоначальному воздействию определяют передаточную функцию от режимных параметров. По передаточной функции определяют ускорения ротора в текущий момент времени. За малый промежуток времени согласно вычисленному ускорению определяют перемещение ротора в смазочном слое. Далее определяется новое положение ротора, и вычисления повторяют для каждого момента времени. По результатам вычислений строят перемещения ротора, вызванные силой. При получении графика перемещения вращающегося ротора каждый следующий этап вычисления начинают с нового положения угла поворота относительно оси вращения.
Заключение
Предложенная методика исследования позволяет получать динамические характеристики роторной системы, такие как обобщенная передаточная функция, описывающее поведение роторных систем на всех режимах работы. Используя обобщенную передаточную функцию, можно вычислить кривую подвижного равновесия ротора. Такая информация позволяет наиболее информативно описывать динамические характеристики опор и поможет в исследовании бесконтактных подшипников.
Библиографическая ссылка
Хвостиков А.С. ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК БЕСКОНТАКТНЫХ ОПОР ВЫСОКОСКОРОСТНЫХ РОТОРНЫХ СИСТЕМ // Современные наукоемкие технологии. 2023. № 4. С. 113-118;URL: https://top-technologies.ru/ru/article/view?id=39586 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.39586