



Практически невозможно перечислить все современные отрасли мировой промышленности, в которых используются планетарные, дифференциальные, замкнутые дифференциальные зубчатые механизмы. Приведем лишь те, где перечисленные механизмы нашли самое широкое применение: это металлургическая, металлообрабатывающая, транспортная отрасли, военная техника, морской флот, сельскохозяйственная и текстильная отрасли. Но и этих примеров уже достаточно для того, чтобы считать научную проблему, связанную с улучшением работоспособности многосателлитных редукторов, в частности с равномерным распределением нагрузки между сателлитами, актуальной задачей. Новый научно обоснованный подход к созданию самоустанавливающихся одноподвижных планетарных многосателлитных механизмов, в которых движение передается всеми сателлитами, обоснован в работах профессора Л.Т. Дворников [1, 2, 3]. Так, в работе [1] приведен не только ответ на вопрос, почему получаемый результат, а именно отрицательная подвижность механической системы – многосателлитной планетарной передачи – не проявляется на практике, но и предложено решение устранения такого несоответствия. Кроме того, в этой же работе теоретически обосновано, что для обеспечения подвижности W = 1 многосателлитные планетарные передачи должны проектироваться таким образом, чтобы число сателлитов равнялось числу дополнительно введенных звеньев – рычагов, только в этом случае возможно осуществить передачу мощности через все сателлиты.
Внимательное изучение научных публикаций, в которых рассматривается проблема усовершенствования передачи движения в многосателлитных планетарных редукторах, позволяет сделать вывод, что большинство работ связывают решение этой задачи с устранением влиянием деформативности на распределение нагрузки по длине зуба, с применением самоустанавливающихся опор сателлитов [4, 5, 6] или с использованием неэвольвентного зацепления зубчатых колес [7, 8, 9]. Кроме того, приводимые результаты исследований в основном получены при помощи компьютерного моделирования.

Рис. 1. Лабораторный стенд для изучения работы планетарного редуктора
Целью настоящей работы является доказательство результатов теоретических исследований, приведенных в работах профессора Л.Т. Дворникова. Для этого в научной школе ФГБОУ ВО СибГИУ «Теория структуры механических систем и практика ее использования при синтезе сложных машин, включая горные и металлургические» созданы экспериментальный лабораторный стенд и действующая модель трехсателлитного одноподвижного планетарного редуктора (рис. 1).
Материалы и методы исследования
Схема экспериментального стенда, установленная на платформу, состоит из электродвигателя, трехсателлитного планетарного редуктора, пусковой и измерительной аппаратуры. При проведении испытаний в схему стенда поочередно устанавливаются трехсателлитный одноподвижный редуктор и редуктор со стандартным водилом. Диагностика зубчатого зацепления производится на базе эмпирического метода исследования, который позволяет определить объект и цель наблюдения, способ регистрации наблюдаемого объекта, а также производить обработку и интерпретацию полученной информации. Для фиксирования результатов, получаемых при проведении испытаний, в схему стенда подключается ноутбук.
Трехсателлитный одноподвижный планетарный редуктор выполнен по патенту на полезную модель [10] с уникальным по конструкции водилом, в структуре которого число сателлитов равно числу дополнительно введенных звеньев (рис. 2а). Кинематическая схема редуктора с тремя сателлитами, соединенными водилом стандартной конструкции, приведена на рисунке 2b. Редуктор с уникальным водилом состоит из семи подвижных звеньев (n=7): солнечной шестерни 1, трех сателлитов 2, 3, 4, двух трехпарных промежуточных звеньев – рычагов, выполненных в виде полуколец 5, 6, и водила 7. Звенья соединены семью шарнирами (р5=7) и шестью кинематическими парами четвертого класса (р4=6), согласно формуле подвижности П.Л. Чебышева W = 3n – 2p5 – p4 = 21 – 14 – 6 = 1, что говорит о его работоспособности.
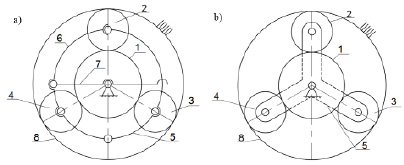
Рис. 2. Одноподвижный (а) и класический (b) трехсателлитный планетарный механизмы
В трехсателлитном редукторе (рис. 2b) число подвижных звеньев n=5, число кинематических пар пятого класса р5=5, четвертого – р4=6, подвижность по формуле П.Л. Чебышева W = 15 – 10 – 6 = –1, и с точки зрения науки теории механизмов и машин такая структура является статически неопределимой, т.е. неработоспособной. Это подробно рассмотрено и обосновано в работе [1].
Изучение передачи мощности сателлитами в планетарных редукторах в данной работе основано на создании электрической цепи постоянного тока. Подача напряжения осуществляется от розетки с напряжением в 220 В. Затем через однолинейные автоматические выключатели С5 серии ВА47-29, служащие одновременно и предохранителями в случае непредвиденного скачка напряжения, напряжение передается на блок преобразования DR-100-12, позволяющий изменять его значение в диапазоне от 12 В до 16 В. При помощи набора универсальных клавиш измерительной аппаратуры осуществляется регулирование частоты вращения и мощности электродвигателя.
Для фиксации замеров исследуемых параметров в электрическую цепь устанавливаются мультиметр и лампа накаливания, которая визуально отображает замкнутую цепь. Ток от плюсового контакта преобразователя напряжения подается на стойку, на которой установлены ведущий вал и солнечная шестерня, затем через сателлиты и водило переходит на ведомый вал и стойку и через лампу накаливания – к преобразователю минусового контакта.
Совмещение мультиметра с компьютером для фиксирования изменений напряжения в электрической цепи при работе редуктора и дальнейшей обработке получаемых результатов осуществляется через переходник Мастер КИТ ВМ 8050 (рис. 3а).
Программное обеспечение UT61B V3.03, взятое с официального сайта https://unitrend.com/html/product/General_Meters/Digital_Multimeters/UT61_Series/UT61B.html, позволяет считывать показания с мультиметра UT 61В и строить графики с интервалом времени от 1 секунды. Совмещение программы с цифровым мультиметром осуществляется через подключение COM-портов от 1 до 4 (рис. 3b, 3c). Для этого в окне «Управление компьютером» необходимо перейти во вкладку «Диспетчер устройств». В появившемся окне перейти в строку «Порты (COM и LPT)» и выбрать появившийся порт, служащий переходником между мультиметром и ПК, и, перейдя во вкладку «Параметры порта», выбрать номер COM-порта для совмещения порта с программой.
После перевода стенда в рабочее состояние на дисплее мультиметра отображается показание напряжения в электрической цепи (рис. 4а). Считывание показаний с мультиметра осуществляется кнопкой COM Connection в программе UT61B V3.03. Измерение напряжения в электрической цепи контролируется мультиметром, находящимся в положении замера V. Для передачи значения напряжения на ПК мультиметр переводится в режим сопряжения с ПК при помощи длительного нажатия кнопки «REL», после чего на дисплее отображается в квадрате символ «S» (рис. 4b).После завершения эксперимента все исследуемые параметры отображаются в области «а» (рис. 4b), а показание изменения подаваемого напряжения за установленный период времени – в виде графиков в области «б».
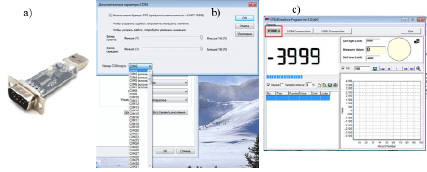
Рис. 3. Переходник Мастер КИТ ВМ 8050 (а), рабочие окна программы UT61B V3.03 и выбор портов (b, c)
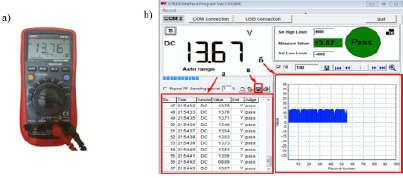
Рис. 4. Настройка мультиметра (а), регистрация показаний (b)
Для проведения дальнейшего анализа полученные данные сохраняются в формате Excel нажатием кнопки в области «в».
Результаты исследования и их обсуждение
При проведении исследования в одноподвижном планетарном редукторе два сателлита выполнены из капролона с целью исключения их при работе редуктора и получения возможности изучения периода зацепления металлического сателлита, который в конструкции редуктора является токопроводящим. Капролон – конструкционный полимер, обладающий прочностью, не уступающей стали, работающий при широком диапазоне температур: от –40˚С до +80˚С. Именно эти свойства позволяют заменить капролоновые сателлиты на металлические в дальнейших исследованиях без влияния на работу других деталей редуктора и изменения конструкции.
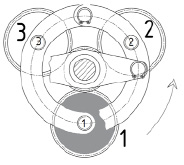
Рис. 5. Последовательность расположения металлического сателлита
Для доказательства того, что расположение металлического сателлита не влияет на величину передаваемой мощности (напряжения), он поочередно устанавливался на осях капролоновых сателлитов по схеме, приведенной на рисунке 5.
Для достоверности получаемых результатов и проведения математической статистики исследования проводились по пять циклов для каждого расположения металлического сателлита при следующих режимах частот вращения электродвигателя: n=55 мин-1, 107,5 мин-1, 120 мин-1, 265 мин-1 и 440 мин-1. Диагностика зубчатого зацепления сателлита с солнечной шестерней оценивается изменением подаваемого напряжения (U=14 B) в электрической цепи с периодом фиксации контакта зубчатых колес каждую секунду, время полного цикла составляет 1 минуту.
На рисунках 6а, 6b, 6c приведены графики изменения напряжения в одноподвижном планетарном редукторе при частоте вращения n=55 мин-1. Анализ графиков убедительно показывает, что передача напряжения, а, следовательно, и мощности не зависит от того, на какой оси расположен стальной сателлит. Отклонение напряжения на выходном валу одноподвижного планетарного редуктора от подаваемого напряжения составляет не более 4%, что подтверждает постоянство зубчатого зацепления.
В трехсателлитном планетарном редукторе со стандартным водилом (рис. 6d) отклонение от подаваемого значения напряжения в среднем составляет более 20%, а в некоторые периоды времени практически приближается к нулю; это объясняется тем, что зацепление солнечной шестерни с сателлитами в это время минимально, пятно контакта зубьев незначительно.
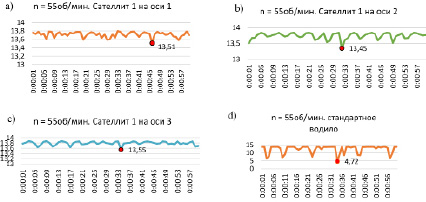
Рис. 6. Графики изменения напряжения в одноподвижном редукторе (a, b, c) и стандартном (d)
Минимальные значения напряжений
|
nдвигателя, об/мин |
Редуктор со стандартным водилом |
Одноподвижный редуктор |
|
55 |
4,72 |
13,2 |
|
107,5 |
2,72 |
13,24 |
|
120 |
2,38 |
13,22 |
|
265 |
4,08 |
12,82 |
|
440 |
4,11 |
12,67 |
В таблице приведены минимальные значения контролируемого напряжения на ведомых валах планетарных редукторов, полученные при разных частотах вращения. Отметим, что в одноподвижном редукторе наблюдается большее отклонение от подаваемого напряжения при увеличении частоты вращения электродвигателя. По нашему мнению, это связано с точностью изготовления деталей, а также с условиями сборки и балансировкой водила.
В трехсателлитном планетарном редукторе со стандартным водилом значительные потери напряжения (а, следовательно, и мощности) связаны с проблемой невозможности обеспечения постоянного зацепления между зубьями всех сателлитов с центральной шестерней.
Заключение
Полученные в настоящем исследовании результаты указывают на то, что метод создания одноподвижных многосателлитных планетарных редукторов, предложенный профессором Л.Т. Дворниковым, в которых число сателлитов принимается равным числу дополнительно введенных рычагов, обеспечивает гарантированное зацепление зубчатых колес в течение всего времени работы и, как следствие, минимизирует потери передаваемой мощности. Кроме того, при проектировании одноподвижных редукторов существенно снижаются габаритные размеры, поскольку расчет на прочность необходимо проводить с учетом равномерного распределения нагрузки пропорционально числу планируемых сателлитов.
Библиографическая ссылка
Гудимова Л.Н., Серебряков И.А. К вопросу о распределении нагрузки в многосателлитных планетарных редукторах // Современные наукоемкие технологии. 2022. № 10-2. С. 243-248;URL: https://top-technologies.ru/ru/article/view?id=39376 (дата обращения: 08.07.2026).
DOI: https://doi.org/10.17513/snt.39376