



Современное развитие в области разработки и использования экзоскелетов отличается разнообразием технических решений конструкций и исполнений. Созданные на сегодняшний день и разрабатываемые экзоскелеты нуждаются в создании моделей, позволяющих еще на стадии проектирования исследовать их работоспособность и оценить технические характеристики. Особенно это касается приводных механизмов, сенсоров и алгоритмов глобального управления. Экзоскелет как кибернетическое устройство является весьма сложным устройством [1–3]. Как и для любой технической системы, при создании модели необходимы знания о принципах действия, функционально физических связях и причинно-следственных отношениях между разнородными по физической и бионической реализации возможностями.
При исследовании систем используются модели различных подсистем каркаса, реализовать которые особенно важно на этапах проектирования. Как правило, предсказать поведение двух различных по физической природе объектов без моделирования сложно, учитывая, что, с одной стороны, это биологическая система, а с другой, механизм. Кроме того, в моделях приходится учитывать взаимосвязи приводных устройств, системы управления и устройств преобразования сенсорных сигналов мышечной активности – электромиографии и электроэнцефалограммы головного мозга.
Если конструктивные решения реализуются относительно просто, то решение приводных механизмов и управление процессом движения вызывает определенные трудности. Управление подвижностями полностью направлено на управление приводами.
Заметим, что человеческое тело является источником информации о процессе управления и инициирует управляющие функции по аналогии, будь то программатор или программа действий. Формализовать эти процессы – важнейшая задача. Экзоскелет можно представить и как копирующий манипулятор, и как робототехническую антропоморфную систему. При этом существуют проблемы навигации перемещений, воспроизводства походки, близкой к антропоморфной, включая задачи стабилизация вертикального положения и защиту от опрокидывания. Системы управления приводами экзоскелета можно разделить на системы с управлением положением, крутящим моментом и позиционно силового взаимодействия. Многообразие движений программируется в зависимости от выполняемых действий. При этом основным сигналом стимуляции движений является тело оператора, его мышечная или нервная активность в ответ на выполняемое действие (подъем и перенос тяжестей с учетом геометрического положения суставов, движение без нагрузки, наклоны и приседания и др.). И практически в каждом случае необходимо обеспечивать взаимосвязь движений. Таким образом, задачи программирования связаны с интерпретацией активности тела человека в коды команд управления приводами.
Обобщающая модель связывает между собой модели составных частей и устройств и дает представление о возможности реализации проектируемого экзоскелета в пределах поставленной цели.
Число научных публикаций, касающихся моделирования в рассматриваемой области, незначительное. Поэтому построение модели любого процесса или устройства поможет решить поставленные задачи с наименьшими потерями.
Целью исследований является создание модели взаимосвязанных приводов экзоскелета, исследование ее работоспособности и возможности одновременного регулированиям положения и скорости ведомых приводов.
Материалы и методы исследования
Каркас нижних конечностей экзоскелета конструктивно выполнен аналогично особенностям строения человеческого тела. Он представляет собой последовательно соединенные конструктивные элементы, содержащие редукторы со встроенными двигателями в соответствующих суставах, с помощью которых и осуществляется перемещение. По существу каркас является конструкцией, параллельной костной системе.
Анатомия носителя каркаса и характеристики каркаса образуют биотехническую систему. Организация взаимодействия всех составляющих механической, приводной и электронной систем каркаса представляет собой довольно сложную задачу, особенно с нейробиологической точки зрения. Структурная схема такой взаимосвязанной системы представлена на рис. 1. Она включает в себя три привода: привод бедренного сустава, привод коленного сустава и привод сустава стопы. Каждый из приводов построен по структуре подчиненного регулирования и включает в себя три контура: положения, скорости, тока – и работает в следящем режиме. Приводы связаны между собой через вычислительные устройства, входами которых являются сигналы положения и скорости предыдущего и последующего приводов. Ведущим приводом в схеме является привод, обеспечивающий эквивалентное движение бедренного сустава. Соответственно, ведомыми становятся привод коленного сустава, а для привода стопы привод коленного сустава становится ведущим. В качестве движителя используется двигатель постоянного тока с редуктором на выходном валу. Наличие редуктора позволяет реализовать две задачи. Во-первых, для обеспечения динамики необходимо использовать двигатель с минимальным временем разгона и, следовательно, с повышенной частотой вращения. Подвижности каркаса неполно поворотные, а потому необходимо привести скорость перемещения суставов каркаса к естественной скорости перемещения конечностей носителя каркаса. При этом необходимо ограничивать угол поворота как механически, так и электронно. Во-вторых, механическая мощность зависит от скорости вращения и момента, развиваемого двигателем.
Рассмотрим привод одной координаты каркаса. Представим сепаратный привод обобщенной моделью в пространстве состояний в виде
ẋ = Ax+Bu,
y = Cx,
где A – (n × n) – матрица коэффициентов; B – (n × m) – матрица управления; C – (r × n) – матрица выходного сигнала.
Состояние системы в любой момент времени может быть охарактеризовано положением в n-мерном пространстве состояний изображающей точки, координатами которой являются выходные переменные элементарных звеньев системы.
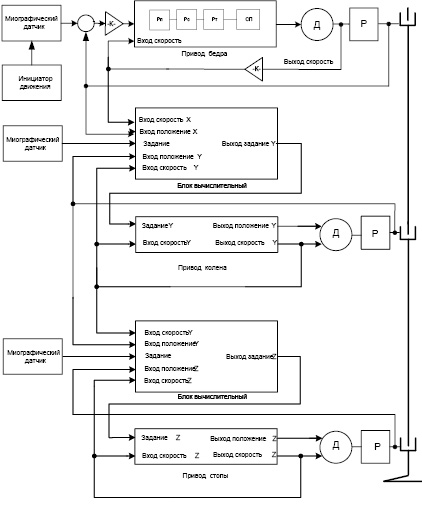
Рис. 1. Структурная схема взаимосвязанной системы приводов: Р – редуктор, Д – двигатель
Модель привода, отвечающая представлению в пространстве состояний, приведена на рис. 2. Необходимым условием работы привода является обеспечение характеристик, подобных носителю каркаса. Среднестатические данные говорят, что с момента инициации движение длится примерно 30 мс, что соответствует нервной проводимости, переходящей в мышечную активность, длящуюся примерно 50 мс, что соответствует времени выполнения некоторого действия. Это время должно быть обеспечено в приводе как время переходного процесса. Анализ работы сепаратного привода показал, что привод, регулируемый по скорости, обеспечивает необходимое время разгона до заданной величины.
Приводы объединяются таким образом, чтобы обеспечить движение с учетом взаимного изменения положения с определенной скоростью. Причем каждый последующий привод становится ведомым по отношению к предыдущему и ведущим к последующему.
Рис. 2. Модель сепаратного привода
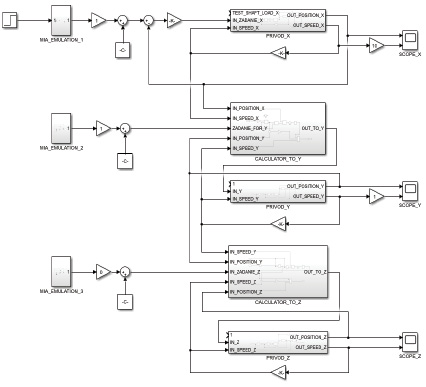
Рис. 3. Модель взаимосвязанных приводов
В любом случае начало движения определяется приводом бедренного сустава. Его мышечные сигналы о перемещении и скорости, измеренные с использованием миографического датчика, поступают на устройство согласования. Одновременно на него поступают сигналы о перемещении и скорости коленного сустава (ведомого привода), где в каждый момент времени происходит вычисление соотношения скоростей между приводами в каждой точке перемещения суставов. Причем сигнал мышечной активности, поступающий на ведомый привод, смешивается с вычисленными значениями, и этот сигнал является сигналом взаимосвязанного управления ведомым приводом. Полная модель взаимосвязанных приводов представлена на рис. 3.
Результаты исследования и их обсуждение
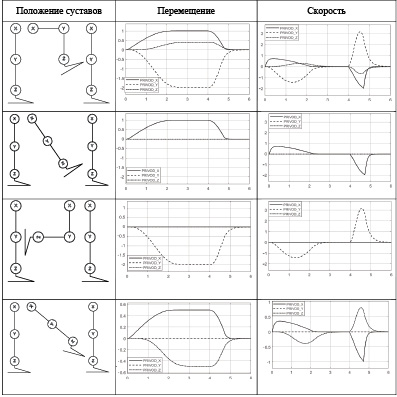
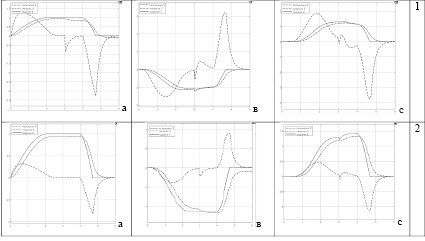
Исследование принципа работы рассматриваемой схемы проводилось с использованием пакета Simulink программной среды Matlab [4, 5]. В рассматриваемом случае ставилась задача обеспечить движение при различных вариантах пространственного расположения элементов каркаса, эквивалентное движению ноги. Для проверки функционирования приводов суставов сформирован аналог одного шага. Реакция на воздействие представлена в табл. 1. Цикл длится 6 с.
Процесс состоит из подъема бедренного аналога берцовой кости в течение двух секунд, опускания голеностопного сустава с задержкой на 0,2 с и подъема стопы с задержкой в 0,8 с. В течение двух секунд суставы остаются неподвижными, и затем формируется сигнал, эквивалентный срабатыванию разгибательных мышц, и суставы приходят в исходное положение. Вероятное положение элементов каркаса приведено в табл. 1. Для каждой подвижности приводятся измеренные сигналы перемещения и скорости. Эмуляция датчиков мышечной активности в модели запускается одновременно. Эти сигналы определяют движение приводов суставов. Взаимосвязь приводов осуществляется с использованием вычислительного блока, реализующего функциональную зависимость. По существу вычислительный блок можно настроить и на нелинейную функцию произвольного вида. Такой режим работы возможен, например, при восстановлении двигательных функций конечностей после травм, когда необходима различная скорость перемещения отдельных суставов.
При возникновении нагрузки привода компенсируют возмущение. Это показано в табл. 2. Для варианта 1 возмущение создается в бедренном суставе. Момент нагрузки составляет 25 % от номинального значения, развиваемого двигателем.
В момент воздействия скорость перемещения падает и с постоянной времени привода возвращается в исходное состояние. При этом момент нагрузки сохраняется. В силу взаимосвязи ведомый привод реагирует на это воздействие по скорости и положению и продолжает отрабатывать входное задание после окончания воздействия. В случае 2 аналогично создается нагрузка на привод коленного сустава. Ведомый привод компенсирует это воздействие и продолжает отрабатывать заданное воздействие. Создаваемые возмущения компенсируются от привода к приводу с амплитудой, зависящей от настройки. В ведомых приводах возмущение может быть полностью устранено с использованием настроек в вычислительном устройстве. Для этой цели лучше использовать специализированное устройство в структуре привода.
Таблица 1
Реакция приводов каркаса на типовое положение суставов
X – бедренный сустав, Y – коленный сустав, Z – голеностопный сустав
Таблица 2
Варианты возмущенного движения
Нагрузка может возникать и от болевого синдрома, и от внезапно возникшего препятствия, что вызывает изменение уровня сигнала с миографического датчика. Распознавание таких ситуаций довольно сложная задача и требует привлечения дополнительного источника информации.
Таким образом, моделирование показало принципиальную возможность взаимосвязанного движения суставов каркаса с заданными параметрами регулирования положения и скорости.
Заключение
Компьютерное моделирование является одним из важнейших средств исследования электромеханических систем. Многие нюансы, которые нельзя увидеть в формулах, можно увидеть при компьютерном моделировании. Получение реальных характеристик и целенаправленное управление параметрами позволило найти решение, обеспечившее движение приводов каркаса во взаимосвязи. Изменение функции взаимодействия между ведомой и ведущей координатами позволило получить закон, связывающий перемещение и скорость. Производится расчет скорости и её коррекция во всех точках траектории перемещения, относительно ведущей координаты. Любое изменение в поведении ведущей координаты отражается в характере движения ведомой и, соответственно, в последующих степенях подвижности.
Моделирование показало принципиальную возможность и качественное управление приводами суставов экзоскелета.
Библиографическая ссылка
Веселов О.В., Логинов Д.Д. МОДЕЛЬ ВЗАИМОСВЯЗАННЫХ ЭЛЕКТРОПРИВОДОВ ЭКЗОСКЕЛЕТА // Современные наукоемкие технологии. 2022. № 7. С. 14-20;URL: https://top-technologies.ru/ru/article/view?id=39226 (дата обращения: 02.07.2026).
DOI: https://doi.org/10.17513/snt.39226