



Целью исследования является создание алгоритмического обеспечения решения задачи обработки изображений в задаче дефектовки дорожного полотна для работы в режиме реального времени на устройствах с малой вычислительной мощностью.
Синхронизация камер – это процесс, при котором 2 или более камер создают и передают разные потоки кадров в один момент времени для получения кадров стереоизображения. Идеальная синхронизация камер достигается в тот момент, когда разница по времени между совершением кадров равняется 0 с. На практике такую синхронизацию получить практически невозможно, поэтому задача синхронизации камер заключается в уменьшении времени между производством двух кадров в одной системе [1].
Процесс получения стереоизображения напрямую зависит от синхронизации двух камер, используемых в модуле стереопары. Так как система работает при динамическом движении автомобиля, то очень важно добиться минимального времени между кадрами, чтобы получить как можно большее качество стереоизображения.
В данном случае используются 2 камеры GoPro Hero7 Black. Видеопотоки с этих камер захватываются микрокомпьютером Jetson Nano посредством карт видеозахвата Espada EcapViHU. Каждая камера подключена к двум независимым USB 3.0-портам, что дополнительно позволяет ускорить работу модуля.
Камеры не имеют внешних триггеров для синхронизации потока кадров. Поэтому было разработано 2 алгоритма (рис. 1) для синхронизации камер, а соответственно и получения кадров с минимальной разницей во времени.
При использовании первого алгоритма кадр с первой камеры захватывается и сразу же открывается, а затем захватывается кадр со второй камеры и открывается.
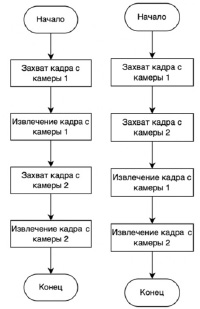
а) б)
Рис. 1. Блок-схема алгоритма получения кадров: а) 1 способ; б) 2 способ
При использовании первого алгоритма (кадр с камеры 1 захватывается и сразу же открывается, а затем захватывается кадр с камеры 2 и открывается) было выяснено, что разница между кадрами при 30 кадрах в секунду составляет примерно 32 миллисекунды, а при 60 кадрах в секунду составляет примерно 17 миллисекунд. При использовании второго алгоритма (камеры сначала фиксируют кадры, а после фиксации извлекаются сразу с двух камер) было выяснено, что временной интервал между кадрами при 30 кадрах в секунду составил 11 миллисекунд, а при 60 кадрах в секунду составил 8 миллисекунд. Это существенно меньше, чем при работе первого алгоритма.
Можно сделать вывод, что задача синхронизации камер заключается в уменьшении времени между производством двух кадров в одной системе. В качестве метода синхронизации камеры был выбран второй алгоритм, так как при его использовании заметен меньший временной интервал, в сравнении с первым алгоритмом.
Методика создания системы для сбора данных заключалась в использовании двух видеокамер и специально сконструированного крепления для того, чтобы получившуюся систему стереозрения можно было закрепить на автомобиле.
В качестве видеокамер использовались две камеры GoPro 7 HERO в режиме 1080p 120 кадров в секунду. Для крепления стереопары и обрабатывающего компьютера к автомобилю была создана специальная конструкция. Для крепления камер и микрокомпьютера использовались изделия, напечатанные из нейлона на 3D-принтере для облегчения веса конструкции. Также на 3D-принтере был напечатан герметичный корпус для Jetson Nano. Данная система предполагает установку на любой автомобиль (не требуется предварительная подготовка или какое-либо дополнительное оборудование).
Основной задачей при проектировании прототипа стереокамеры является достижение стереоэффекта. Стереоэффект основан на особенностях бинокулярного зрения человека и эффекте параллакса.
Наиболее часто применяется способ достижения стереоэффекта, при котором сенсор, регистрирующий изображение, смещается параллельно на расстояние, называемое базой стереосъемки (стереобазой). Для достижения качественного стереоэффекта изображения с правой и левой камер должны быть выравнены относительно друг друга в вертикальной и горизонтальной плоскости.
В зависимости от величины стереобазы изменяется погрешность расчета карты глубины изображения. Чем больше величина стереобазы, тем выше точность расчета расстояния до наблюдаемого объекта.
Исходя из расчета, для достижения приемлемой точности измерений расстояния до наблюдаемого объекта, находящегося в пределах одного метра от стереокамеры, минимально необходимо использовать базу стереосъемки, равную 15,38 см.
Поскольку для решения поставленных целей и задач обнаружения будет выбрана обучаемая модель, ей необходимы примеры для обучения. Обычно для популярных задач машинного обучения имеются общедоступные коллекции примеров для обучения и исследований. Однако по причине относительного новшества решаемой в данной работе задачи, и необходимости тестирования разрабатываемой системы на реальных данных, было необходимо сформировать датасет.
Обучение нейронной сети для решения поставленных задач осуществлялось на собранном посредством установки наборе данных (рис. 2).
В результате было собрано 20 000 ректифицированных стереоизображений (рис. 3), на которых отображены дефекты дорожного покрытия. Стереоизображения были разделены на 4 класса (по типам детектируемых дефектов) – трещины, выбоины, проломы, другое. На их основании были построены карты диспаратностей, которые затем были размечены на предмет выбоин при помощи утилиты LabelME [2; 3]. Наконец, результирующий набор данных был поделен на тренировочный и оценочный в соотношении 80% к 20%.
Создание наборов данных не ограничивается сбором реальных изображений, другой подход к созданию обучающих данных – синтез искусственных изображений. Как правило, для этого используется аугментация. Процесс аугментации заключается в применении различных преобразований со случайными коэффициентами, например увеличение яркости или контраста изображения, поворот изображения, отражение изображения по вертикали или по горизонтали и т.д. Это значительно расширяет тренировочный набор данных, что дает возможность нейронной сети лучше обобщать предсказания за счет большей устойчивости по отношению к изменению некоторых параметров входных данных.
В данной работе при обучении модели, основанной на архитектуре MC-CNN, применялись следующие случайные преобразования: горизонтальное масштабирование, поворот, изменение яркости и контраста, «наложение» погодных условий (снег, дождь), «наложение» дефектов камеры (блики, запотевания). Применялись они в основном при помощи механизма аффинных преобразований. Также каждое входное изображение стереопар было стандартизировано при помощи вычитания из каждого пикселя среднего значения всех пикселей и вычитания значения стандартного отклонения.
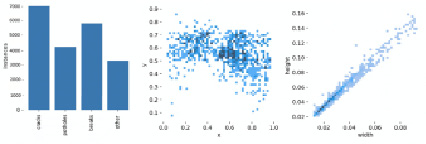
Рис. 2. Классы и количество элементов, содержащиеся в наборе данных

Рис. 3. Примеры собранных изображений
Увеличение набора данных путем многократного преобразования обучающих примеров является широко используемым методом для уменьшения ошибки. Преобразования применяются во время обучения и не влияют на производительность среды выполнения.
Вследствие применения методов аугментации к начальному набору данных, датасет увеличился до 57 137 изображений.
Параметры преобразования данных выбираются случайным образом для каждой пары патчей, и после одной эпохи обучения, когда один и тот же пример представляется сети во второй раз, выбираются новые случайные параметры. Выбираются разные параметры преобразования для левого и правого изображения: например, левый участок поворачивается на 10 градусов, а правый на 14 [4].
При анализе 4 моделей нейронных сетей и испытании их на реальных данных лучшие результаты показала MС-CNN. По результатам обучения MС-CNN показала наилучшую производительность и точность – 91.2%. При этом сети SegStereo, GC-Net, SGM-Nets также показали хорошие результаты.
Так как лучший результат среди исследуемых алгоритмов показала модель MС-CNN, то целесообразно создавать свою архитектуру на базе этой сети.
В данной архитектуре (рис. 4) применяется расширенная свертка [5] вместо традиционной операции свертки для того, чтобы увеличить поле восприятия. Благодаря этому поле восприятия экспоненциально расширяется для достижения лучшего результата вычисления цены сопоставления на основе патчей изображения. Данный подход позволяет избежать ухудшения карты признаков. Также объединяются признаки из различных слоев свертки.
Проведенные исследования показали, что предлагаемая модель обеспечивает лучшую производительность, чем имеющийся алгоритм MC-CNN, а также лучше работает на участках со слабой текстурой.

Рис. 4. Архитектура разработанной сети Prophetam-DD
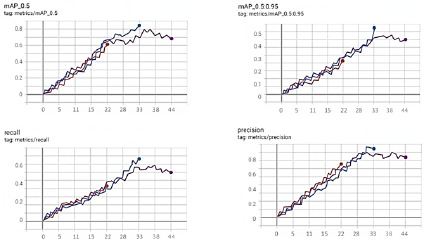
Рис. 5. Построенные системой карты диспаратности
MC-CNN состоит из двух основных частей.
Первая часть представляет собой пару сиамских сетей [6]. Сеть состоит из 5 сверточных слоев, каждый слой при этом имеет ядро 3×3. Два интересующих нас участка изображения подаются в сеть (входные данные). Затем объекты, которые были извлечены из сиамских сетей, объединяются в качестве конечного результата.
Вторая часть состоит из трех полносвязных (FC) слоев с 384 нейронами и слоя, в котором в качестве функции активации применяется сигмоида [7]. Во избежание повторных вычислений и повторного использования модели на всем изображении полносвязные слои заменяются сверточными слоями с ядром 1х1.
Традиционные сверточные слои были заменены расширенными сверточными слоями. На сверточных слоях с ядром 3х3 устанавливаются коэффициенты расширения (1, 1, 2, 4, 8), при этом увеличивая поле восприятия с 11х11 до 33х33.
Вместо того чтобы использовать вывод conv5 только в качестве признаков изображения, вывод conv3, conv4 и conv5 объединяется как дескриптор.
В качестве метода оптимизации используется стохастический градиентный спуск (Stochastic gradient descent) [8]. Данный метод использует один пример из всей тренировочной серии для аппроксимации градиента, по которому затем происходит корректировка весов модели.
Итоговая модель обучалась 33 эпохи с коэффициентом обучения, равным 0.002, и моментом градиентного спуска 0.9.
Для тренировки сети использовался фреймворк PyTorch [9], для загрузки, предобработки и аугментации изображений использовалась библиотека компьютерного зрения OpenCV. Дальнейшая обработка выходных данных нейронной сети осуществляется вызовом ядер CUDA при помощи библиотеки CuPy.
При помощи ядер CUDA реализован параллельный алгоритм полуглобального сопоставления [10]. Его идея состоит в оптимизации цены сопоставления в различных направлениях и расчета на ее основании средней диспаратности. В данной работе используется вариация алгоритма с оптимизацией в 4 направлениях.
Дальнейшая постобработка осуществляется при помощи алгоритма устранения конфликтов. Этот этап используется для улучшения качества правой карты диспаратности посредством исключения конфликтующих значений между левой и правой картой.
Для оценивания точности системы используется собранный набор данных.
Оценка точности заключается в составлении карты диспаратности на основании стереопар оценочного набора данных и в последующем сравнении отклонений предсказанных значений от известных истинных из набора. Если отклонение превышает установленное граничное значение, делается вывод об ошибочности данного предсказания.
Для данной работы был выбран способ оценивания «bad2.0», в котором рассчитывается общий процент ошибочных предсказаний на всех стереопарах оценочного набора.
Для выбора оптимального срока обучения, с целью избежания ситуации недообучения или переобучения модели, было принято решение обучить модель на различном количестве эпох и сравнить полученные результаты. Сравнение обучений в 22, 33 и 44 эпохах и их визуализация осуществлены при помощи TensorFlow (рис. 5).
Оранжевый график – 22 эпохи, синий график – 33 эпохи, фиолетовый график – 44 эпохи; mAP (mean average precision) – метрика качества ранжирования; recall (полнота) – метрика, которая показывает, как много объектов класса Positive модель смогла распознать; precision (точность) – метрика, которая показывает, как много объектов, которые модель пометила классом Positive, действительно относятся к этому классу. По результатам обучения на 33 эпохах Prophetam-DD показал наибольшую производительность и точность – 96.78%.
Заключение
На основе архитектуры MC-CNN был разработан алгоритм детектирования дефектов дорожного полотна – Prophetam-DD. В искомую архитектуру были добавлены слои расширенной свертки вместо использования традиционной свертки. Это было сделано для того, чтобы расширить поле восприятия и избежать ухудшения карт признаков. В итоге разработанный нейросетевой алгоритм детектирования структурированных объектов на видеоизображении Prophetam-DD показал высокие результаты и точность детектирования, равную 96,78%.
Библиографическая ссылка
Полянцева К.А. РАЗРАБОТКА АЛГОРИТМОВ НАКОПЛЕНИЯ ДАННЫХ ПОСРЕДСТВОМ СТЕРЕОПАРЫ И ДЕТЕКТИРОВАНИЯ ДЕФЕКТОВ ДОРОЖНОГО ПОЛОТНА // Современные наукоемкие технологии. 2022. № 5-1. С. 107-112;URL: https://top-technologies.ru/ru/article/view?id=39156 (дата обращения: 24.07.2026).
DOI: https://doi.org/10.17513/snt.39156