



Разработанные еще век назад принципы передачи нагрузки при переносе человеком груза через внешний каркас с начала 2000-х гг. получили новое воплощение. В создании подобных устройств в равной степени заинтересованы военные, представители медицинской сферы, промышленность и космическая отрасль. Особенно важно применение экзоскелетов в задачах адаптации человека в социуме. Число нуждающихся в экзоскелетах в нашей стране составляет примерно один процент (это около полутора миллионов человек). В медицине экзоскелеты являются универсальным инструментом, помогающим при снижении у пациентов мышечной силы, если есть необходимость уменьшить нагрузку на позвоночник во время тренировок спортсменам, реабилитироваться после травм, самостоятельно передвигаться детям с церебральным параличом, травмами мозга, повреждениями спинного мозга, мышечной дистрофией, после инсульта и при других заболеваниях. В России и за рубежом вопросу построения подобных систем уделяют внимание огромное число научных центров и организаций [1–3]. Так, например, российская компания ExoAtlet предлагает медицинские экзоскелеты для реабилитации пациентов с нарушениями опорно-двигательного аппарата и нервной системы в нижней части тела. Они управляются при помощи кнопок, расположенных на костылях, и приводятся в движение благодаря сигналам от датчиков и электромиограммы. Алгоритмы устройства и встроенные приводы повторяют естественную ходьбу человека. ExoAtlet весит около 20 кг, при этом пациент не ощущает этот вес, поскольку движения автоматизированы и поддерживаются самой системой. Стоимость экзоскелета высока.
Анатомические характеристики человеческого тела и параметры механического устройства, каркаса образуют биомеханическую систему. Поэтому сложность создания экзоскелета, кроме конструктивных особенностей, связана с синхронизацией подсистем: нейробиологической, механической, приводной и электронной.
Отметим важнейшие особенности при создании новых моделей экзоскелетов. Необходимо создание обратной связи между телом человека и каркасом, преобразуя нейронную активность в команды мышцам. В отдельных случаях важно создание дополнительных усилий при совершении элементарных действий. При создании систем управления экзоскелетом обеспечить снижение противоречивости между нервной и мышечной активностью и работой исполнительных систем. И, наконец, использование методов искусственного интеллекта. Очевидно, что использование методов искусственного интеллекта в создании экзоскелетов позволит перейти на новый уровень взаимодействия различных подсистем, особенно в задачах принятия решений в процессе управления.
Перемещение элементов каркаса, инициируемого телом человека, основано на использовании приводной техники с различной природой рабочего тела. Наибольший удельный вес применения в конструкциях характерен для электроприводов, несмотря на ограничение возможностей при использовании автономных источников питания. Современный автоматизированный электропривод является одним из основных технических средств, используемых при решении задачи автоматизации различных технологических процессов и поэтому для проектируемых в настоящее время технологических машин характерно увеличение количества электродвигателей в одной рабочей машине, усложнение функций, выполняемых электроприводами, а также взаимная увязка этих функций в едином автоматическом цикле работы. Решение можно искать в обеспечении взаимосвязанного управления приводами отдельных подвижностей.
Число научных публикаций в рассматриваемой области незначительное из-за сохранения конфиденциальности результатов. В большей степени информация представлена в виде рисунков и видеороликов.
Исследование функционирования взаимосвязанных приводов нижних конечностей экзоскелета с одновременным регулированием положения и скорости ведомых приводов.
Материалы и методы исследования
Каркас экзоскелета конструктивно напоминает многостепенную робототехническую систему. Как и в любой технологической машине, обеспечивающей перемещение исполнительных механизмов, в каркасе используются приводные, измерительные и управляющие системы. Это дает возможность использовать в решении задач известные методы из области робототехники, но с учетом особенностей предметной области (объекта управления) [4]. По существу каркас является конструкцией, параллельной костной системе. В силу симметричности каркаса будем рассматривать одну из сторон нижних конечностей человека с особенностями локального управления тазобедренным, коленным и голеностопным суставами. Глобальное управление движением не рассматривается.
В последнее время наиболее широко исследуются приводы рабочей машины, взаимосвязанные через нагрузку. Взаимосвязь подобного рода возникает в тех случаях, когда силовой рабочий процесс состоит из двух или нескольких одновременных движений, осуществляемых от индивидуальных электроприводов. При этом момент сопротивления каждого из движений может зависеть от соотношения скоростей движения, алгебраической суммы этих скоростей или соотношения путей, проходимых при совершении этих движений. Весьма отчетливо эта взаимосвязь проявляется при управлении технологическими роботами, в том числе экзоскелетом. Подобного типа построенные системы можно разделить на две большие группы: электроприводы с одним базовым регулятором скорости, который служит ведущим для всех остальных, и электроприводы с взаимной коррекцией скоростей. Принципиальная разница между ними заключается в том, что первую группу образуют системы с так называемыми односторонними связями, а ко второй группе относятся системы с двусторонними связями.
Структурная схема системы многодвигательного электропривода с базовым регулятором скорости представлена на рис. 1. На рис. 1, а, показана структурная схема электропривода, в которой управление группой электроприводов осуществляется от одного ведущего привода, а на рис. 1, б, структурная схема электропривода, в котором воздействие на ведомые электроприводы формируется из сигналов, пропорциональных скоростям вращения нескольких ведущих электроприводов.
Первый вариант этой схемы можно определить как электропривод с параллельным управлением ведомыми электроприводами. Второй вариант схемы по такой классификации можно назвать электроприводом с последовательно-параллельным управлением ведомыми электроприводами. Как следует из структурной схемы, показанной на рис. 1, а, статические соотношения скоростей в режиме холостого хода определяются выражениями
 ;
;  ,
,
где К32 и К33 – статические коэффициенты передачи, соответствующие передаточным функциям преобразователей W32(p) и W33(p) соответственно.
При наличии моментов сопротивлений на выходных валах соотношение скоростей определяется выражениями
 ;
;
 ,
,
где КДМ2; КДМ3 – коэффициенты передачи двигателей по моменту на валу;
KCi = KNi × KДi × KОСi – коэффициент усиления сепаратной системы.
Структурная схема, показанная на рис. 1, б, не имеет сколько-нибудь заметных преимуществ перед предыдущей, за исключением тех случаев, когда моменты сопротивления второго и третьего электроприводов близки по величине как в установившихся, так и переходных режимах. В этом случае введение дополнительной связи второго электропривода с третьим делает соотношение скоростей, n2, и n3 более близким.
В отличие от электроприводов с базовым регулятором электроприводы с взаимной коррекцией скоростей обычно используются в тех случаях, когда регулируемые скорости являются функционально равнозначными. Здесь результирующая скорость является геометрической суммой скоростей, причем выделить одну из этих скоростей как основную невозможно. Структурная схема такой взаимосвязанной системы представлена на рис. 2.
Здесь для повышения точности взаимосвязанной системы в целом предусмотрены перекрестные межканальные связи с передаточными функциями W12(p), и W21(p), вводимые для повышения точности при динамических изменениях скоростей n1 и n2.
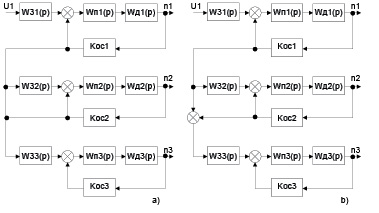
Рис. 1. Структурные схемы электроприводов с базовым регулятором скорости: а) с параллельным управлением; б) с последовательно-параллельным управлением (W31(p), W32(p), W33(p)) – передаточные функции звеньев задания скорости; n1, n2, n2, – скорости вращения двигателей; U1 – управляющий сигнал задатчика скорости ведущего привода; WД(p) – передаточные функции двигателей; WП(p) – передаточные функции преобразователей; Kос коэффициенты передачи обратных связей
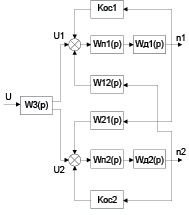
Рис. 2. Структурная схема электроприводов с взаимосвязанной коррекцией скоростей: n1, n2, – скорости вращения двигателей; U, U1,U2 – управляющие воздействия; W3(p) – передаточная функция задатчика скорости; WД(p) – передаточные функции двигателей; WП(p) – передаточные функции преобразователей; КОС – коэффициенты передачи обратных связей; W12(p), W21(p) – передаточные функции корректирующих связей
Рассмотренные структуры решают задачи взаимосвязи либо по скорости либо по положению. В нашей задаче нужна такая структура взаимосвязей, при которой учитываются и скорость, и перемещение одновременно. Функциональная схема такого подхода приведена на рис. 3. Она состоит из трех автономных приводов системы управления, которые связаны между собой последовательно через нечеткие контроллеры НК1 и НК2 [5]. Входными сигналами на приводы являются сигналы, получаемые от датчиков мышечной активности, обработанные с помощью нечеткого контроллера НК3.
Схема работает следующим образом. На вход ведущего привода подается сигнал с ДМА тазобедренного сустава и формируется закон изменения скорости движителя этого сустава. Одновременно по функциональной зависимости вычисляют в НК1 значение сигнала положения и скорости движителя коленного сустава и подают вычисленное значение сигнала на вход НК1 с учетом сигнала мышечной активности получаемого с контроллера НК3, а затем на регулятор положения привода коленного сустава. Аналогично осуществляется связь с приводом движителя голеностопного сустава.
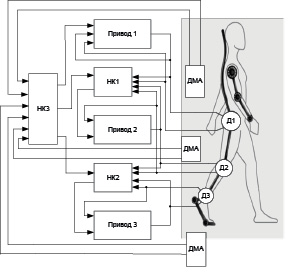
Рис. 3. Функциональная схема управления взаимосвязанными приводами: ДМА – датчики мышечной активности, Д1, Д2, Д3 – движители суставов, НК1, НК2, НК3 –нечеткие контролеры
Результаты исследования и их обсуждение
Исследование принципа работы рассматриваемой схемы проводилось с использованием пакета Simulink программной среды Matlab. Отметим сразу, что в рассматриваемом случае ставилась задача обеспечить движение эквивалентное одному шагу (рис. 4). Приводы суставов построены однотипно и представляют собой трехконтурную структуру подчиненного регулирования в двигателе постоянного тока. Режим работы следящий. Приводы настроены на максимальное быстродействие, устойчивы и не имеют перерегулирования.
Нечеткие контроллеры НК1 и НК2 также имеют однотипную структуру. Имеют четыре входа и один выход. Два входных сигнала снимаются с ведомого привода и два с ведущего. База знаний строилась на основе информации, снимаемой с датчиков скорости и положения при различных условиях нагружения и положения с учетом общего центра масс. Дополнительный пятый вход несет информацию о величине напряжения пропорциональной суммарной силе возникающей при выполнении определенных действий. Функции принадлежности выбираются так, чтобы обеспечить необходимую функциональную связь. Таким образом на вход НК поступает информация о пространственном расположении соответствующих подвижностей каркаса (ведущего и ведомого приводов), скоростей их перемещения и величины задания передаваемой на привод с контроллера НК3.
Контроллер НК3 собирает информацию с миографических датчиков, установленных на активных мышцах бедра, голени и стопы. Контроллер имеет семь входов, по числу датчиков, установленных на соответствующих мышцах, и три выхода, по числу используемых приводов. Терм множества формируются на основе активности следующих мышц нижних конечностей: двуглавой (сгибание), полусухожильной (разгибание), икроножной (сгибание и разгибание), латеральной (разгибание), прямой мышцы бедра (сгибание и разгибания), медиальной (разгибание) и передней большеберцовой (сгибание). Существенную роль в построении нечеткого контроллера играет выбор функции активации. Как следует из рис. 5, форма сигнала (рис. 5, б) требует использования нелинейных функций активации. Кроме того, сам сигнал в значительной степени зависит от физиологических особенностей пользователя. Влияние шумов (рис. 5, б) еще больше обостряет задачу выбора функции активации. Поэтому достоверность результата в сильной степени зависит от выбора вида функции принадлежности.
При выполнении движений между ними существует связь, которая используется для создания правил. Объединяются мышцы, одновременно выполняющие функции сгибания или разгибания. В зависимости от этого формируются терм множества выходных сигналов для приводов. Функции принадлежности выходных сигналов могут быть и линейными.
Для проверки функционирования приводов суставов сформирован аналог одного шага. Реакция на воздействие представлена на рис. 4.
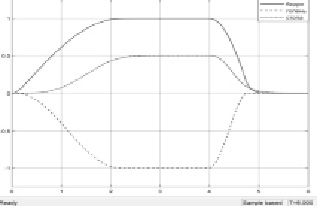
Рис. 4. Перемещение элементов каркаса экзоскелета
|
а |
б |
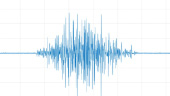
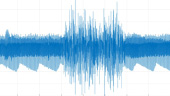
Рис. 5. Форма сигнала: а – в отсутствии помех, б – на фоне шумов
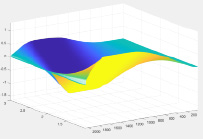
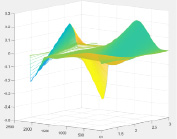
Рис. 6. Поверхности выхода: а – скорость, б – положение.
Цикл длится 6 с. Процесс состоит из подъема бедренного аналога берцовой кости в течение 2 с, опускания голеностопного сустава с задержкой на 0,2 с и подъема стопы с задержкой в 0,8 с. В течение 2 с суставы остаются неподвижными, и затем формируется сигнал, эквивалентный срабатыванию разгибательных мышц и суставы приходят в исходное положение. Поверхности выхода, описывающие режим движения одновременно по скорости и положению всех суставов, представлены на рис. 6.
Таким образом, рассмотренная структура позволяет обеспечить взаимосвязанное движение суставов каркаса с заданными параметрами регулирования положения и скорости.
Заключение
Отличительные особенности предлагаемого решения заключаются в реализации функционального взаимодействия между ведомой и ведущей координатами, причем каждый предыдущий привод становится ведущим для каждого последующего. Наличие регулятора положения и устройства расчета положения обеспечивает движение во взаимосвязи по траекториям в пространстве координат со стабилизацией скорости относительно ведущей координаты. Обеспечивается расчет скорости и её коррекция в каждый момент времени во всех точках траектории движения, относительно ведущей координаты. Рассмотренная структура взаимосвязанных приводов может быть использована и для обеспечения движения каркасом рук.
Библиографическая ссылка
Веселов О.В., Баталов А.В., Логинов Д.Д. ВЗАИМОСВЯЗАННОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДАМИ ЭКЗОСКЕЛЕТА // Современные наукоемкие технологии. 2022. № 5-1. С. 12-17;URL: https://top-technologies.ru/ru/article/view?id=39143 (дата обращения: 24.07.2026).
DOI: https://doi.org/10.17513/snt.39143