



К числу основных проблем эффективного решения задач стратегического управления развитием больших социальных сообществ, например «умных» городов, с помощью систем поддержки принятия решений нужно отнести следующие. Данная задача имеет высокую сложность, обусловленную не только большим размером сообщества и разнообразием учитываемых объектов, но и столкновением интересов большого количества лиц, участвующих в принятии решения. Повышению уровня сложности способствует также междисциплинарность и фрагментация научных исследований в области прогнозирования развития социума. Встает вопрос, какие модели использовать для анализа вариантов трансформации, предлагаемых разными участниками процесса принятия решения. Известно, например, что математические модели экономики подходят к своему пределу сложности, несмотря на необходимость все более точно отражать действительность [1]. Еще одной важной проблемой является сложность создания самой СППР (ее программирования, эксплуатации и сопровождения) и, соответственно, уровень доверия к ее результатам со стороны лиц, принимающих решения. Третья проблема заключается в следующем. Разработанные и реализованные проекты трансформации умных городов (Лондон, Барселона, Нью Йорк и др.) в основном охватывают: энергетику, транспорт, водоснабжение и водоотведение, строительство и инженерные инфраструктуры. К сожалению, при разработке данных проектов пока слабо учитываются индивидуальные свойства, отношения друг с другом, склонности, способности населения конкретных городов. Как показывают результаты исследований ведущих ученых современности, лауреатов Нобелевской премии И. Пригожина [2] и Р. Талера [3], данное обстоятельство не позволяет строить адекватный прогноз поведения отдельных субъектов городских процессов, что может привести к нежелательным последствиям при реализации стратегии.
В настоящее время все большее признание завоевывает точка зрения, что единственно возможным средством для решения рассматриваемых проблем является имитационное поведенческое моделирование [4] общественных процессов. Именно оно позволяет учесть в моделях свойства различных объектов модели, индивидуальные характеристики и особенности поведения отдельных личностей и других типов активных агентов.
Данная работа посвящена определению требований к средствам создания имитационных моделей развития социума, выбору и разработке с помощью пакета AnyDynamics информационных компонент базового уровня, являющегося основой для создания моделей развития общества.
Материалы и методы исследования
Система имитационного моделирования социума должна обеспечить представление множества территориально распределенных взаимодействующих между собой многокомпонентных активных агентов и пассивных объектов. В качестве основного активного элемента СИМ общества предлагается использовать модель активного многокомпонентного агента, включающего: систему управления (мозг), источник энергии, рецепторы (органы чувств), эффекторы (для физического преобразования, перемещения объектов и взаимодействия с другими объектами), средства передачи и приема информации. Указанная структура характерна для любых типов активных объектов.
Основные требования к моделям динамических процессов в СИМ определяются следующим образом:
1. Каждый агент живет в цикле реализации своих потребностей, причинами которых могут быть новые внешние или внутренние обстоятельства (сигналы) [5].
2. Процессы реализации потребностей могут существовать параллельно, что требует разрешения конфликтов на компонентах агента. Способы разрешения конфликтов: инстинктивный, из памяти, минимальные усилия, планирование, заданные системы приоритетов. Необходим учет характера и эмоций агента на принятие решений.
3. Процессы генерации и реализации потребностей имеют непрерывно-дискретный характер. Структура процессов реализации потребностей определена в базе знаний агента (БЗ) и представляет собой множество рецептов реализации потребностей, известных агенту на определенной фазе развития.
4. Агенты могут выбирать эффективные, с их точки зрения, средства и рецепты реализации потребностей. Агенты могут взаимодействовать между собой и с пассивными объектами физически и путем передачи информации.
5. Структура модели может меняться в процессе развития социума, могут удаляться, вводиться и воспроизводиться как агенты, так и любые другие объекты модели
6. Вследствие высокой сложности и междисциплинарности объекта моделирования языковые средства создания модели должны быть основаны на простых, желательно графических, метафорах (или паттернах) представления структуры и динамики социальных процессов [6].
В [7, 8] показано, что в качестве эффективной метафоры для представления динамических дискретно-непрерывных процессов развития агента и его взаимодействия с внешней средой может быть использована графическая модель гибридного (непрерывно-дискретного) автомата. На основе результатов сравнительного анализа инструментов моделирования [9, 10], поддерживающих метафору гибридного автомата, в качестве средства для разработки компонент базового уровня модели развития социума была выбрана система AnyDynamics [7, 11].
Процесс создания модели предполагает ее постепенное развитие, в значительной степени соответствующее философии развития реального социума.
Базовая модель социума включает множество территориально распределенных взаимодействующих между собой интеллектуальных агентов и объектов потребления. В качестве объектов потребления представлены однократно используемые или воспроизводимые энергоносители, распределенные в жизненном пространстве агентов. Множество агентов может меняться во времени за счет их воспроизводства и гибели, принудительного включения и исключения их из модели. Базовая модель интеллектуального агента представлена на рис. 1.
Модель включает следующие компоненты:
1. Внутренние органы: Система управления и Генератор (источник) энергии.
2. Рецепторы: Видеорецептор и Приемник информации.
3. Эффекторы: Эффектор движения, Манипулятор и Передатчик информации.
Все компоненты модели агента представлены гибридными автоматами и заданы своими внутренними и внешними переменными, диаграммами переходов между состояниями, а также уравнениями, действующими в компоненте в рамках конкретного состояния.
Генератор энергии (рис. 2) может находиться в трех состояниях: Генерация энергии для компонент агента, Ожидание зарядки и Зарядка. Значение уровня зарядки определяет переходы между состояниями. Каждое состояние определено своим набором процессов, заданных дифференциальными и/или алгебраическими уравнениями. Входы генератора: Энергосырье и Сигнал запуска зарядки (Потреблять). Выходы: Уровень зарядки и Сигнал «Низкий уровень заряда». Сигнал «Низкий уровень заряда» рассматривается как потребность агента в дополнительной энергии. Он поступает в систему управления, которая организует процесс удовлетворения потребности. Отсутствие энергии в течение определенного времени может привести к гибели агента.
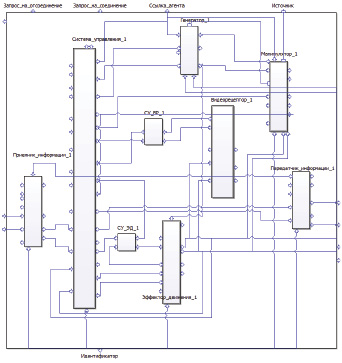
Рис. 1. Модель агента
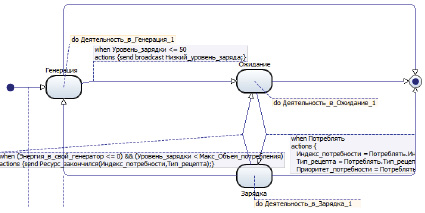
Рис. 2. Модель генератора

Рис. 3. Системы управления: а) главная, б) эффектора движения, в) видеорецептора
Видеорецептор представляет средство обнаружения объектов в пространстве вокруг агента. Входом для видеорецептора является Запрос обнаружения объекта определенного типа, выходом – Координаты обнаруженного объекта. Эффектор движения моделирует средство перемещения агента в пространстве. Входами для него являются запросы перемещения агента в определенную или исходную точку пространства (дом) и случайное блуждание с целью поиска нужного объекта, выходом – координаты агента. Манипулятор представляет средство, выполняющее функции перемещения в свой генератор необходимого объема энергоносителя из рядом расположенного источника, а также выгрузку энергоносителя из манипулятора в соседнюю точку среды обитания при доставке его другому агенту.
Система управления (СУ) агента представлена Головной СУ и системами управления конкретными рецепторами и эффекторами (рис. 4). Головная СУ играет роль операционной системы агента. Она анализирует возникшие потребности, ведет их реестр, выбирает и запускает рецепты удовлетворения потребностей, контролирует ход их исполнения. База знаний агента представлена совокупностью рецептов удовлетворения потребностей, известных данному агенту, а также опытом их реализации. Системы управления рецепторами и эффекторами принимают запросы на использование конкретных компонент от Головной СУ, ведут их реестры, выбирают приоритетные запросы и управляют их реализацией. Выбор тех или других рецептов определяется Головной СУ, определяется уровнем знаний агента (множеством известных рецептов), историей их использования и некоторыми чертами характера (эгоист/альтруист, холерик/флегматик). На рис. 3 представлены примеры моделей управления верхнего уровня. Показано, что Головная СУ агента реагирует на два типа запросов: внутренние запросы, например, на сигнал разрядки внутреннего источника энергии, а также внешние сигналы, например, на сигнал запроса помощи в получении информации о месте нахождения энергоносителя или его доставке.
Управление реализацией потребностей осуществляется на базе эталонных моделей. Эталонные модели создаются для каждого типа потребностей. К числу эталонных моделей отнесены [12]:
1. Рецепты удовлетворения основных потребностей потребления (естественные, духовные).
2. Рецепты взаимодействия и установления отношений.
3. Рецепты развития и усиления возможностей для реализации потребностей (например, приобретения навыков).
4. Рецепты анализа и выбора: средств реализации потребностей, объектов потребления, путей (рецептов) реализации поставленных целей.
В базовой модели агент располагает эталонными моделями рецептов потребления и взаимодействия с другими агентами при оказании информационной и материальной (физической) помощи. Эталонный рецепт потребления запускается сигналом возникновения потребности. Он включает фазы: обнаружения объекта потребления, получения доступа к объекту, подготовки потребления и собственно потребления объекта. Для каждой из фаз возможен выбор конкретного рецепта из множества известных агенту.
В базовой модели в качестве основной потребности потребления рассматривается недостаток энергии, а фазы эталонного рецепта реализуются самим агентом с помощью видеорецептора, эффектора движения, манипулятора и генератора в режиме зарядки.
При невозможности самостоятельного обнаружения, доступа к объекту и подготовки к потреблению агент может запросить помощь других агентов. Эталонный рецепт помощи запускается соответствующим запросом, принятым агентом от агента, нуждающегося в помощи. Эталонный рецепт материальной помощи включает фазы: поиска объекта помощи, доступа к объекту, загрузку объекта помощи в манипулятор, доставку объекта помощи субъекту и возврат в исходную точку (рис. 4).
Базовая модель социального общества позволяет проводить эксперименты, связанные с анализом влияния на развитие общества ряда физических и умственных способностей агентов, их характеров и отношений друг с другом. К числу физических способностей агентов, в частности, отнесены: радиус обзора пространства, скорость обнаружения объектов, перемещение в пространстве, рост силы потребности, уменьшение запаса энергии.
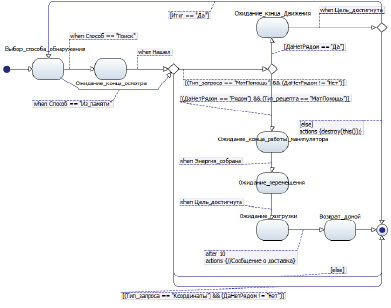
Рис. 4. Эталонный рецепт помощи
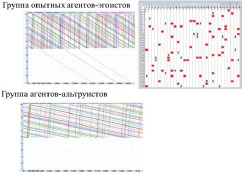
Рис. 5. Результаты эксперимента с группами агентов – эгоистов и альтруистов
Результаты исследования и их обсуждение
Умственные способности определяются наличием памяти прошедших событий и объемом ментальной базы знаний рецептов исполнения потребностей. Характеры агентов задаются уровнями их реактивности, индивидуализма, системами приоритетов при выборе одной из параллельно действующих потребностей и рецептов их исполнения. На рис. 5 представлены результаты эксперимента с моделями двух групп агентов: альтруистами и эгоистами. На графиках показано изменение запасов энергии в каждой из групп. Видно, что группа эгоистов постепенно начинает терять своих членов, в то время как группа альтруистов за счет оказания информационной и материальной взаимопомощи продолжает существовать.
Заключение
В работе показана эффективность разработки моделей социальных сообществ в среде AnyDynamics. Использование моделей гибридных автоматов позволило практически исключить программистов из процесса разработки социума. Подтверждена возможность простого описания и включения в модель социума, основанную на механизме интеллектуальных гибридных автоматов, новых типов активных и пассивных объектов. Определены эталонные модели процессов реализации рецептов потребления и взаимодействия агентов при оказании информационной и материальной помощи. Предполагается что дальнейшее развитие модели будет осуществляться в соответствии с философией развития реального социума.
Библиографическая ссылка
Клебанов Б.И., Вакушин А.А., Тен Ю.М. ПРИМЕНЕНИЕ ПАКЕТА ANYDYNAMICS ДЛЯ РАЗРАБОТКИ ИМИТАЦИОННЫХ МОДЕЛЕЙ СОЦИАЛЬНЫХ СИСТЕМ // Современные наукоемкие технологии. 2022. № 4. С. 46-51;URL: https://top-technologies.ru/ru/article/view?id=39106 (дата обращения: 02.07.2026).
DOI: https://doi.org/10.17513/snt.39106