



Автономные транспортные средства – это транспортные средства, способные воспринимать окружающую среду и перемещаться без участия человека на различных участках, особенно на асфальтированных дорогах. Способность к автонавигации во многом зависит от способности автомобиля отслеживать и точно интерпретировать состояние дорожного покрытия [1]. Таким образом, разработка эффективных механизмов мониторинга дорожного покрытия значительно повысит жизнеспособность автономных транспортных средств, одновременно способствуя сокращению связанных с ними дорожно-транспортных происшествий во всем мире [2–4].
При мониторинге дорожных покрытий акселерометры часто предлагаются для использования в автономных транспортных средствах [3, 5, 6]. Так, в работе [7] авторы использовали подход машинного обучения для классификации дорожных покрытий на гладкие или неровные, используя сигналы, полученные от акселерометра на базе мобильного телефона и гироскопа, что позволило выявлять дорожные аномалии с относительно высокой точностью, однако не учитывалась проблема характеризации аномалий. В [8] для обнаружения аномалий была разработана система патрулирования выбоин, состоящая из транспортного средства, оснащенного датчиком акселерометра для мониторинга и обнаружения выбоин. Данные акселерометра, собранные во время драйв-тестов, передавались через Wi-Fi в центральную базу данных, где они использовались для применения метода опорных векторов для последующей кластеризации измеренных данных об ускорении. Аналогичным образом в [9] был предложен подход к обработке измерений, полученных с лазерного профилометра, в сторону профилирования дорожных покрытий. Результаты показали, что метод дискретного вейвлет-преобразования лучше подходит для профилирования дорожного покрытия, чем метод спектральной плотности мощности.
Акселерометр – это устройство, измеряющее ускорение тела (например, транспортного средства, самолета или ракеты) относительно перегрузки [4]. Выходные данные акселерометра можно рассматривать как серию измерений с временной выборкой, на которые влияет движение наблюдаемого тела (в данном случае транспортного средства) в трехмерном пространстве. Однако известная и широко распространенная проблема обработки измерений акселерометра заключается в их зашумленности [2]. Случайность в сигналах ускорения часто делает обнаружение дорожных аномалий сложным процессом, а характеристику – еще более сложной, а иногда и невыполнимой задачей [3–6]. В этом случае под обнаружением мы подразумеваем идентификацию аномалии, а характеристику определяем как распознавание типа воспринятой аномалии – выбоина или неровность. Таким образом, предоставление новых методов для улучшения обнаружения и характеристики дорожных аномалий обуславливает актуальность и необходимость разработки алгоритма визуализации и определения характеристик дорожных аномалий для автономных транспортных средств.
Исходя из вышеизложенного, целью исследования является разработка алгоритма характеристики дорожных аномалий (АХДА), который основан на алгоритме пространственной фильтрации масштаба вейвлет-преобразования (АПФ). Алгоритм АПФ обрабатывает сигналы ускорения, разлагая их на несколько шкал, что происходит путем корреляции разложенных вейвлет-коэффициентов сигнала по соседним шкалам, а затем фильтрации зашумленных выборок с помощью спроектированного пространственного фильтра. АХДА выделяет характеристики, используя две уникальные функции, позволяющие отличить выбоины от неровностей.
Материалы и методы исследования
Общая конструкция предлагаемой системы представлена на рис. 1. Исходным этапом зондирования дорожного покрытия и реализации алгоритма служит разработка системы сбора данных. Тремя основными задачами данного этапа служат процесс сбора данных о дорожном покрытии с использованием акселерометра, инициализация входных параметров и отображение данных для визуального осмотра и анализа.
Отметим, что акселерометр был запрограммирован с использованием LABVIEW для упражнений по сбору данных с частотой дискретизации 30 Гц посредством нескольких драйв-тестов. В рамках данного исследования была внедрена глобальная система позиционирования (GPS) для обнаружения дорожных аномалий, для чего был запрограммирован микроконтроллер Arduino в интегрированной среде разработки Arduino (IDE). По сути, система инициализирует модуль GPS для регистрации времени сбора данных, а затем записывает соответствующие координаты долготы и широты места, где были получены данные. Частота дискретизации GPS была установлена на уровне 1 Гц, что оказалось достаточным для предоставления точек данных о местоположении во время драйв-теста [9].

Рис. 1. Блок-схема системы обнаружения, описания и профилирования дорожных аномалий
В качестве приблизительного показателя шероховатости в описании качества дороги используется стандартное отклонение сигнала ускорения, полученного за определенный период. На основании индекса шероховатости был разработан алгоритм оценки неровностей дороги для определения гладкости дорожного покрытия. Если значение индекса шероховатости ниже определенного фиксированного порогового значения, алгоритм решает, что дорожное покрытие гладкое, подразумевая, что транспортное средство находится на асфальтированной дороге, и активирует алгоритм обнаружения и описания аномалий, который будет описан далее. Однако, если значение индекса выше порогового значения, алгоритм переходит в режим ожидания, отмечая, что проезжаемая дорога может быть не асфальтовой и, следовательно, обычно неисправной. В течение периода пребывания программа отображает сообщение «Неровная дорога», а алгоритм обнаружения и характеристики дорожных аномалий активируется только тогда, когда измеряемый индекс неровности ниже порогового значения.
Следующим этапом обработки данных служит характеристика дорожных аномалий, в рамках которой разработанный алгоритм характеризации использует теорию вейвлет-преобразования (ВП) и метод фильтрации шума, чтобы характеризовать дорожные аномалии как выбоины или неровности. Используемая техника фильтрации позволяет отфильтровать шум от сигналов ускорения, отмечая, что зашумленные выборки имеют более низкие значения корреляции по возрастающей шкале ВП. Данный метод фильтрации был принят, поскольку он обрабатывает сигналы как по частотной, так и по временной шкале, что позволяет лучше распознавать сигналы со скрытыми функциями, которые впоследствии можно использовать как для обнаружения, так и для определения характеристик дорожных аномалий.
Как было отмечено ранее, для преобразования формата данных используется программное обеспечение LABVIEW для программирования акселерометра. Мы рассматриваем измерение акселерометра по оси Z, поскольку оно напрямую связано с вертикальным смещением транспортного средства, вызывающим различные реакции, когда транспортное средство либо спускается в выбоину, либо поднимается по неровности. Сигнал акселерометра, полученный из точки «А», обычно выводится программным обеспечением LABVIEW в формате «.xml», который был преобразован в подходящий формат MATLAB «.mat» для дальнейшей обработки. Отметим, что для разработки наших алгоритмов применяется программное обеспечение MATLAB, в котором данные переносятся из столбца в вектор-строку, а затем возводятся в соответствующую двоичную степень двойки и дополняются нулями, если размер данных меньше значения экспоненты. Результат процесса преобразования передается алгоритму определения характеристик.
В рамках исследования и разработки алгоритма была применена модель преобразования вейвлета и выдвинута гипотеза о возможности принятия теории ВП для фильтрации сигналов ускорения и их исследования, как по частоте, так и по времени. Наша гипотеза основывалась на представлении о возможности рассмотрения временных областей сигнала в дополнение к их частотному измерению, для получения новой шкалы выявления неизвестных и скрытых особенностей сигнала. Используемая дискретная модель ВП выражается в уравнении (1). Для определения подходящей базисной функции Ψj,k (x) были визуально изучены различные модели функций, такие как функция мексиканской шляпы (Морле), получаемой двукратным дифференцированием функции Гаусса, Хаара, Добеши, Койфлета и вейвлет-функции Мейера. Их паттерны визуально сравнивались с типичными сигналами ускорения с целью выявления наиболее похожих, в результате чего было обнаружено, что базисная функция вейвлета Добеши выдает наилучший результат. Тем не менее данные функции были проанализированы, и их характеристики представлены в разделе результатов. Принятая нами дискретная модель ВП обычно выражается как
 , (1)
, (1)
где Ψj,k (x) – нормированная двойная базисная функция, J – максимальное количество шкалы разложения, K – положение максимума в шкале исходного сигнала, W(j,k) – фактическое масштабное пространственное разложение при разных масштабах разрешения, j – индекс масштабов, а k – позиция индекса в исходном пространстве сигналов. Несколько членов функциональной семьи функции Добеши были реализованы в соответствии с формулой
 для
для  (2)
(2)
где a – диадический масштабный параметр,  – разрешение, t = ka – диадический смещающий параметр. Масштабные переменные были дискретизированы, расширены и переведены для получения диадического ВП с использованием
– разрешение, t = ka – диадический смещающий параметр. Масштабные переменные были дискретизированы, расширены и переведены для получения диадического ВП с использованием
 (3)
(3)
где k – индекс смещения  Опишем, как эти функции в (1)–(3) были использованы в нашем подходе к характеристике дорожных аномалий.
Опишем, как эти функции в (1)–(3) были использованы в нашем подходе к характеристике дорожных аномалий.
При оценке коэффициентов вейвлет-преобразования коэффициенты f(x) записываются как
 (4)
(4)
где Ψj,k (x) соответствует значениям функции, вычисленным в (3). При увеличении масштабного коэффициента j значения коэффициента либо остаются постоянными, либо увеличиваются, когда фронты сигнала становятся положительно коррелированными. С другой стороны, выборки шума имеют тенденцию уменьшаться при более высоких масштабах вследствие некорректной корреляции. Используя эти свойства, мы без труда извлекли компоненты шума из интересующих частей, соответствующих аномальным точкам в наборе данных. Далее опишем процесс фильтрации на основе оценочных значений коэффициентов. Был реализован алгоритм масштабной пространственной фильтрации в соответствии с [9, 10] для фильтрации шума. Данный алгоритм коррелирует вейвлет-коэффициенты, напрямую перемножая их по соседним шкалам. Это можно смоделировать как
 , (5)
, (5)
где Ω представляет собой функцию пространственной корреляции, J – количество шкал умножения, а W(j+i,k) и (j+i) – вейвлет-коэффициенты в -м масштабе. Следуя (5), выборки шума идентифицируются и выделяются в более высоких масштабах на основе их низких значений корреляции. Этот процесс объясняется с учетом того, что коэффициенты вейвлет-преобразования первого и второго масштаба равны W(1,k) и W(2,k) соответственно. Затем эти две шкалы перемножаются для j = 1 в (5) следующим образом:
Ω2(1,k) = W(1,k)W(2,k). (6)
Для улучшения обнаружения мы сочли целесообразным использовать Ω2(1,k), а не W(1,k) или W(2,k) потому что он дает большие отклики в увеличивающихся масштабах.
Разработанный алгоритм обнаружения дорожных аномалий отслеживает фронты сигнала в сигнале с шумоподавлением для обнаружения точек, соответствующих дорожным аномалиям в сигнале. Заключительным элементом системы является профилометр дорожного покрытия, который был разработан для профилирования дорожного покрытия с использованием GPS-координат, полученных на этапе сбора данных. Он предоставляет карту различных аномальных точек, существующих на поверхности дороги, и состоит из сценария языка гипертекстовой разметки (HTML), написанного и взаимодействующего с картой Google. Выходные данные сценариев HTML и карт Google визуализируются с помощью веб-браузера. Входные данные для координат долготы и широты местоположения транспортного средства доступны через интерфейс браузера, и профилометр предоставляет водителям информацию о состоянии дорожного покрытия, чтобы улучшить процесс вождения.
Результаты исследования и их обсуждение
Цель результатов, представленных в этом разделе, – продемонстрировать способность наших алгоритмов точно обнаруживать и характеризовать дорожные аномалии. Кроме того, в табличном представлении результатов представлена частота ложных срабатываний, точность и коэффициент точности для способности алгоритма обнаруживать аномалии, а результаты характеристик сообщаются с точки зрения идентификации либо неровностей, либо выбоин.
При получении результатов извлечения признаков алгоритм предоставил уникальные функции, которые были использованы для характеристики дорожных аномалий по шумным сигналам ускорения. Было проведено несколько кампаний по измерению сигнала ускорения на разных дорожных покрытиях с использованием разных транспортных средств.
Представим два иллюстративных примера, демонстрирующих сигналы ускорения, полученные над выбоинами и ухабистыми дорожными покрытиями на рис. 2, a и г, соответственно. На рис. 2, а, представлены сигналы ускорения транспортного средства, полученные на асфальтированной дороге, содержащей только выбоины, а на рис. 2, г, представлены измерения ускорения на асфальтовой дороге, имеющей только неровности.
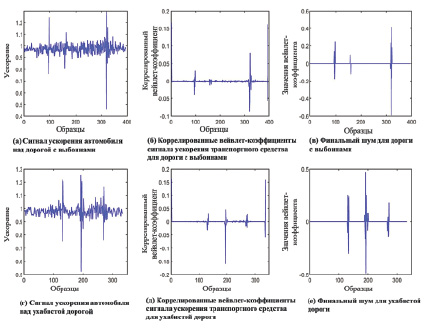
Рис. 2. Результаты на разных этапах процесса характеристики

Рис. 3. Профилированная дорога с метками выбоин
Результаты алгоритма, показывающие выходы коррелированных вейвлет-коэффициентов на рис. 2, б и д, для дорожных покрытий с выбоинами и неровностями соответственно. Мы видим, что данные коэффициенты представляют более точную версию зашумленных измерений, показанных на рис. 2, a и г, соответственно.
Эти данные были обработаны алгоритмом и очищены от шума для получения конечных результатов, показанных на рис. 2, в и е, для дорожных покрытий с выбоинами и неровностями соответственно. Эти выходные данные обеспечивают две уникальные функции, показанные на рис. 2, a и б, для описания выбоин и неровностей соответственно. Основу этих особенностей можно объяснить следующим образом: транспортное средство обычно спускается в выбоину перед тем, как выбраться из нее, при подъеме по кочке и перед спуском по кочке. Эти различные модели движения отражаются в сигнале ускорения, который АХДА четко определяет, используя алгоритм АПФ.
В рамках исследования обеспечивается визуальное представление выходных данных дорожного профилирования, демонстрирующих как выбоины, так и неровности, что было апробировано для нескольких выбранных аномалий, соответствующих GPS-координатам. Красные метки на рис. 3 служат для обозначения различных местоположений обнаруженных и охарактеризованных аномалий. Эти карты на рис. 3 призваны продемонстрировать концепцию и функциональность системы профилировщика дорог. Тем не менее требуется дальнейшее развитие в этом направлении. Выходные данные профилировщика могут использоваться водителями для выявления дефектных участков дорожного покрытия с целью улучшения процесса вождения.
Заключение
В данной статье представлены алгоритмы обнаружения и описания дорожных аномалий для возможного применения как в пилотируемых, так и в беспилотных транспортных средствах. Разработанный алгоритм работает путем фильтрации шумовых измерений, полученных с помощью акселерометра, установленного в транспортном средстве. Свойство положительной корреляции в разных масштабах в области ВП используется для обнаружения аномальных точек в сигнале ускорения. Были разработаны две уникальные функции, позволяющие отличать выбоины от неровностей. Полученные результаты позволяют предположить, что эти признаки могут быть успешно использованы для характеристики дорожных аномалий с высоким уровнем точности, достоверности и низким уровнем ложных срабатываний. Необходимо отметить, что данные, получаемые с помощью акселерометра, достаточны для исчерпывающей диагностики состоянии дорожного покрытия. Будущие работы будут сосредоточены на разработке адаптивных механизмов для изменения порогового значения алгоритма на основе различных наборов измерений, а не статического порогового значения, рассматриваемого на данном этапе нашего исследования. Кроме того, будут изучены механизмы передачи информации о характерных дорожных аномалиях между транспортными средствами или между транспортным средством и придорожной инфраструктурой в типичных системах VANET. Текущее исследование способствует улучшению характеристик дорожных аномалий для будущего использования в автономных транспортных средствах.
Библиографическая ссылка
Забержинский Б.Э., Золин А.Г., Беда Д.А., Богданова Е.М., Гусинская Д.А., Маркова Э.А. РАЗРАБОТКА АЛГОРИТМА ВИЗУАЛИЗАЦИИ И ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ДОРОЖНЫХ АНОМАЛИЙ ДЛЯ АВТОНОМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ // Современные наукоемкие технологии. 2022. № 4. С. 40-45;URL: https://top-technologies.ru/ru/article/view?id=39105 (дата обращения: 02.07.2026).
DOI: https://doi.org/10.17513/snt.39105