



В 2016 г. в России принята Национальная технологическая инициатива – проект, в который входят программы формирования и развития высокотехнологических рынков. По итогам сессии «Форсайт-Флот» в 2015 г. были выделены девять рынков, один из которых «АэроНет» – «Распределенные системы беспилотных летательных аппаратов». При этом реализация государственных программ в области автоматизации производства в первую очередь касается предприятий оборонного, нефтегазового и энергетического секторов. Для двух последних важным показателем функционирования является экологичность работы установок. Одним из недостатков существующих систем является проблема оперативного получения исходных данных о физико-химической обстановке на территории промышленного объекта и за его территорией.
На данный момент существуют системы контроля ПДК вредных веществ в воздухе в виде стационарных (регулярных) экологических постов и мобильных (передвижных) экологических лабораторий [1]. Мобильное оборудование для аналитических задач особенно актуально для тех компаний, которым нужно выполнять регулярный мониторинг своих объектов в труднодоступных районах и районах со сложной климатической обстановкой. В таких случаях для установки газоанализаторов используют автомобили или другую наземную спецтехнику, а также вертолеты. В частности, компания «Газпром» использовала и использует до сих пор газоанализаторы воздушного базирования, которые устанавливаются на вертолеты Ми-8. Однако, как показала практика применения в том же «Газпроме», использование вертолета с газоанализатором обходится слишком дорого.
Возможное решение проблемы, позволяющее проведение эффективного и непрерывного мониторинга превышения ПДК вредных веществ в воздушном пространстве на больших территориях, не подвергая риску жизнь и здоровье людей, – создание автоматизированной системы мониторинга вредных веществ на базе беспилотного летательного аппарата. Быстрая и достаточно легкая замена контрольно-измерительных приборов обеспечивает адаптивность БПЛА для исследования различных загрязнителей [2]. Разрабатываемая система подразумевает установку портативного многоканального газоанализатора на борт беспилотного летательного аппарата.
Автономность системы обеспечивается бортовым контроллером БПЛА и контроллером газоанализатора, обеспечивающего запись результатов измерения параметров воздушного пространства на цифровой носитель и отправку по каналу связи. Оперативное получение данных измерений позволяет осуществить анализ в режиме реального времени. Постановлением Правительства РФ № 1184 от 29.09.2017 утверждена «дорожная карта», направленная на прогнозирование и развитие технологий беспилотных летательных аппаратов (БПЛА) и применение ее в разных сегментальных рынках [3]. Конечной целью развития программы является формирование конкурентоспособной отрасли беспилотных авиационных систем с выходом на лидирующие мировые позиции.
Основными факторами актуальности автоматизированной системы мониторинга на основе БПЛА являются:
– высокая скорость проведения;
– большая зона покрытия;
– возможность работы в автономном режиме в условиях ограниченной зоны радио- обмена;
– селективность и точность определения инспектируемых веществ и координат антропогенного источника.
Целью исследования является повышение эффективности процессов контроля и измерений воздуха мобильными лабораториями за счет разработки и применения автоматизированной системы на базе беспилотного летательного аппарата.
Объект исследования – информационное и программное обеспечение систем технологического процесса контроля и измерений воздуха на базе беспилотного летательного аппарата.
Задачами исследования являются разработка алгоритмов работы и управления системой.
Существующие российские комплексы с использованием БПЛА могут быть использованы для выполнения задач обеспечения экологической безопасности, а также выявления нарушений санитарно-защитных зон, для оценки выноса загрязняющих веществ за границы санитарно-защитных зон, мониторинга работы трубопроводов, оценки сбросов сточных и загрязненных нефтепродуктами вод, оценки деградации полей и пастбищ, в целях выявления лесных пожаров и других ЧС [4]. Однако существующие на рынке готовые решения, например AirSense Drone, не рассматриваются ввиду их большой стоимости и отсутствия возможности изменения состава комплекса и принципов управления.
Материалы и методы исследования
Для решения поставленных задач применялись методы системного анализа, методы графического описания для объектного моделирования в области разработки программного обеспечения, бизнес-процессов, системного проектирования и отображения организационных структур на основе UML и IDEF-диаграмм.
Материалами для исследования являются технологические процессы и нормы в области контроля и измерения воздуха. Экспериментальные исследования основываются на базе квадрокоптера Mavik 2 Pro и микроконтроллеров семейства Arduino (рис. 1).


а) б)

в)
Рис. 1. Базовые технические компоненты для проведения исследования: а – квадрокоптер Mavik 2 Pro; б – микроконтроллер Arduino Nano V3 (для модуля газоанализатора); в – Arduino UNO R3 (для пульта оператора)
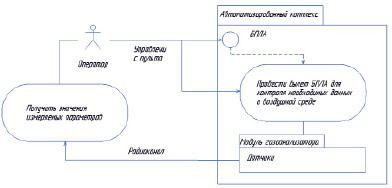
Рис. 2. Диаграмма вариантов использования для разрабатываемой системы
Результаты исследования и их обсуждение
Для описания алгоритмов работы и управления системой воспользуемся диаграммами UML.
Диаграмма вариантов использования (Use Case Diagram) для описания автоматизированной системы мониторинга загрязнения воздуха представлена на рис. 2.
Оператор выполняет удаленное управление системой (автоматизированным комплексом), в состав которого входит БПЛА и газоанализатор со следующими компонентами: датчик влажности, датчик температуры, датчик сероводорода, датчик давления, датчик углекислого газа, датчик метана, устройство записи показаний на SD-карту, датчик GPS/ГЛОНАСС, датчик обнаружения взвешенных частиц (пыли).
Возврат измеренных значений должен выполняться по радиоканалу и дублироваться записью данных на SD-карту.
Тогда диаграмма рассматриваемой предметной области по методологии IDEF0 примет вид, представленный на рис. 3.
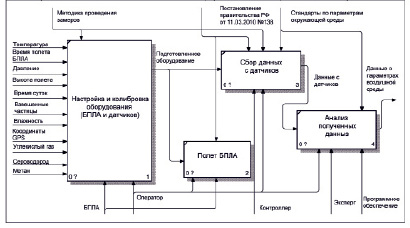
Рис. 3. Диаграмма проекта по методологии IDEF0
Оператор должен «на земле» осуществить настройку и калибровку датчиков, после чего осуществить управление непосредственно БПЛА, вручную или автоматически, по программе полета. Для квадрокоптера Mavik Pro полет может быть спроектирован заранее, по узловым точкам на карте. Сбор данных должен иметь возможность осуществления как в виде непрерывного процесса (с максимально возможной частотой работы самого «медленного» датчика), так и с заданным интервалом времени.
Анализ полученных данных с установленных на БПЛА датчиков осуществляется как непосредственно в процессе управления, при помощи показаний с пульта оператора, так и после полета, на основании записей с SD-карты.
Для исследования полученных данных в настоящее время существует целый ряд программ, предназначенных для автоматизированной обработки информации по результатам мульти- и гиперспектральной съемки в интересах исследования состояния компонентов окружающей среды. Они включают набор процедур предварительной коррекции, трансформирования и разнообразные методы классификации, в том числе объектно-ориентированной сегментации изображений в комплексе с геоинформационными технологиями [5].
Диаграмма деятельности системы управления беспилотными летательными аппаратами для автоматизации контрольно-измерительных работ в воздушном пространстве может быть представлена следующими участниками: БПЛА, оператор, контроллер на удаленной части, контроллер на наземной части; блок записи данных на SD-карту, блок измерения показаний окружающей среды (относительной влажности, температуры, атмосферного давления), блок GPS/ГЛОНАСС, блок определения концентрационных значений для инспектируемых веществ (угарного газа, метана, углекислого газа, сероводорода, взвешенных частиц пыли). Опрос датчиков осуществляется циклически, очередность опроса не важна.
В качестве практической реализации данной системы может выступать система, состоящая из двух микроконтроллеров серии Arduino.
Для реализации системы сбора, записи и передачи данных, устанавливаемой на квадрокоптере, целесообразно использование версии контроллера с малым весом и энергопотреблением. Например, таким контроллером может выступить Arduino Nano. К данному контроллеру возможно одновременное подключение всех ранее названных датчиков. При этом имеется возможность также дальнейшего расширения системы за счет нескольких незадействованных цифровых и аналоговых выводов.
Варианты датчиков: DHT22 датчик температуры и влажности; BMP180 датчик атмосферного давления; SUQ GP2Y1010AU0F датчик взвешенных частиц; MQ136 датчик сероводорода; MQ4 датчик метана; MH-Z19B датчик углекислого газа; GY-NEO6MV2 модуль глобального позиционирования GPS; Micro SD Mini TF модуля записи на цифровой носитель; FS1000A модуля радиоканала связи (передатчик).
Систему приема и вывода показаний датчиков (не является обязательной) возможно реализовать на основе микроконтроллера Arduino UNO. Выбор более производительного контроллера обусловлен снижением требований к весу и энергоемкости, а также исходя из условия подключения графического дисплея (2,8 TFT 320*240) для вывода показаний измерений в режиме реального времени.
Заключение
Оценка состава и качества атмосферы – одна из задач, которую способны решать беспилотные летательные аппараты. В отличие от аэростатов, которые ведут линейные измерения атмосферы, БПЛА могут покрывать большие площади, выполняя автономные программы полетов.
Для такого показателя эффективности, как «стоимость проведения работ» БПЛА имеет лучшие (в плане снижения стоимости) показатели как при закупке самого оборудования для проведения работ (стоимость квадрокоптера, Arduino и комплекта датчиков на порядок ниже стоимости вертолета или аэростата), так и при обеспечении самого процесса получения показателей воздушной среды. БПЛА не расходует бензин, стоимость и доступность запасных частей также намного ниже, чем при применении другой, более тяжелой техники.
При применении БПЛА снижаются также и требования к обслуживающему персоналу. Оператору квадрокоптера не нужно проходить длительную специализированную подготовку и получать допуски и сертификаты на управление. Согласование полета в этом случае может быть осуществлено любым физическим лицом с навыками пилотирования.
Скорость подлета и начала съемки с квадрокоптера намного выше, чем при использовании другой летающей техники за счет большой мобильности летательного аппарата. Взлет БПЛА возможен с открытого пространства радиусом от одного метра (а для некоторых моделей даже с руки), что несравнимо с требованиями по наличию специализированных площадок для взлета и большого открытого воздушного пространства около обследуемого объекта в случае применения вертолетов и аэростатов.
Таким образом, собственная разработка и сборка подобных автоматизированных систем измерения на базе БПЛА, ввиду большой доступности, универсальности и низкой цены современных датчиков-анализаторов, является гораздо целесообразнее покупки готовых систем благодаря возможности гибкой перенастройки и модификации под требуемые задачи.
Библиографическая ссылка
Овечкин М.В., Гедзь А.В. АВТОМАТИЗАЦИЯ КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫХ РАБОТ В ВОЗДУШНОМ ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ БПЛА // Современные наукоемкие технологии. 2021. № 11-2. С. 266-270;URL: https://top-technologies.ru/ru/article/view?id=38922 (дата обращения: 21.06.2026).
DOI: https://doi.org/10.17513/snt.38922