



Виртуальное адаптационное пространство (ВАП) является системой смешанной виртуальной реальности, которая реализуется путем комплексного воздействия на каналы восприятия человека с целью компенсации поврежденных каналов восприятия человека.
В настоящее время известны различные виды систем виртуальной реальности. Современные системы виртуальной реальности используются для создания виртуальных миров и средств коммуникации субъекта виртуальной реальности с компьютерной моделью виртуального мира. Для погружения человека в виртуальную реальность используются устройства, которые оказывают активное влияние на каналы восприятия человека. К числу таких устройств можно отнести шлем виртуальной реальности, который позволяет спроецировать видеопоток моделируемого компьютерного мира на зрительный канал восприятия человека. Для воспроизведения видеопотока используются устройства-ассистенты, которые плотно крепятся к поверхности лица субъекта виртуальной реальности [1]. Перемещение человека в окружающем пространстве синхронизируется с перемещением в виртуальном мире за счет использования видеокамер, которые осуществляют отслеживание перемещения субъекта виртуальной реальности и определяют направление перемещения субъекта виртуальной реальности.
Системы виртуальной реальности позволяют моделировать процессы окружающего мира и реализовывать комплексные системы подготовки специалистов. При реализации систем виртуальной реальности следует учитывать массовое погружение объектов исследуемого мира в виртуальную реальность, которое требует использования больших систем хранения данных. Системы хранения данных для виртуальной реальности должны обладать большой емкостью и высокой скоростью доступа к данным.
При решении прикладных задач виртуализации используются гибридные системы, позволяющие использовать как малые системы виртуальной реальности, так и информацию с каналов восприятия человека. Примером таких систем являются системы дополненной реальности, которые позволяют проецировать компьютерные модели на визуальный канал восприятия человека [2].
Особое место в системах виртуализации занимают системы виртуальных адаптационных пространств, которые позволяют компенсировать поврежденный канал восприятия человека за счет комплексного воздействия на активные каналы восприятия субъекта системы [3].
Виртуальное адаптационное пространство базируется на многослойной архитектуре, которая включает:
- слой выделения объектов;
- ассоциативный слой;
- имитационный слой;
- дополнительные слои.
Слой выделения объектов позволяет обнаружить множество объектов окружающего пространства, подлежащих погружению в виртуальное пространство, и провести классификацию обнаруженных объектов. Ассоциативный слой ВАП позволяет построить карту взаимосвязей между объектами для нахождения сходных черт объектов [4]. Имитационный слой ВАП позволяет провести классификацию модели изменения объектов в ВАП.
Следует отличать два направления применения систем виртуального адаптационного пространства:
- моделирование статических систем;
- моделирование динамических систем.
Для статических систем объекты виртуального адаптационного пространства неизменны в течение времени. К такому направлению можно отнести системы анализа статических изображений, например системы компьютерного зрения и обнаружению объектов сцены на изображении.
Для динамических систем объекты виртуального адаптационного пространства могут претерпевать изменения по разным классам характеристик объектов:
- пространственному расположению объектов;
- форме погружаемых объектов;
- цвету виртуальных объектов;
- взаимосвязей объектов.
При статическом моделировании основное внимание уделяется задаче выделения характерных признаков объектов для последующего обнаружения объектов в окружающем пространстве [5]. При динамическом моделировании помимо решения задачи выделения характерных признаков объектов в окружающем пространстве особое внимание уделяется решению задачи построения шаблона модели поведения объекта (имитационной модели). Имитационная модель объекта содержит обобщенную информацию об изменении характерных черт объектов в рамках заданного временного интервала.
В статье представлен пример погружения динамического объекта физического пространства в виртуальное адаптационное пространство и метод построения имитационной модели объекта.
Цель исследования заключается в раз- витии метода погружения объектов в вир- туальное адаптационное пространство с учетом динамики процессов окружающего пространства.
Задачи исследования:
- построение статического виртуального адаптационного пространства на временном срезе окружающего пространства;
- наполнение базы поведенческих мо- делей;
- расширение статического виртуального пространства в динамическое пространство с классификацией шаблонов поведения динамических объектов.
Материалы и методы исследования
При исследовании сложных систем, которые содержат большое количество взаимодействующих объектов со слабо формализованным поведением, ученые прибегают к имитационному моделированию. Системы имитационного моделирования позволяют формализовать законы динамики сложных систем через моделирование поведения отдельных частей системы.
Построение динамического виртуального адаптационного пространства заключается в итерационном построении фрагментов статического виртуального адаптационного пространства и интерполяции характерных признаков объектов статического ВАП между итерациями. Совокупная динамика характерных признаков объекта формируют имитационную модель динамического виртуального адаптационного пространства.
При построении статического виртуального адаптационного пространства производится сбор данных с сенсорных датчиков систем ВАП. Используя метод расчета оптического потока, система ВАП осуществляет классификацию объектов с последующей экструзией объектов ВАП.
Исходя из анализа границ объектов ВАП выстраивается ассоциативный слой ВАП, позволяющий определить взаимосвязи меду объектами. Ассоциативный слой ВАП позволяет построить математический граф взаимосвязи объектов ВАП. В вершинах графа расположены геометрические центры объектов ВАП. Ребра графа ассоциативного слоя ВАП хранят информацию о смежности объектов ВАП.
Для исследования динамики объектов окружающего мира поверх статического виртуального адаптационного пространства строится имитационный слой виртуального адаптационного пространства. При построении динамического ВАП статическое ВАП разделяется на прямоугольные сегменты по ширине и высоте статического ВАП. Для каждого прямоугольного сегмента вычисляется интегральная характеристика, которая определяется множеством динамических объектов ВАП, центры которых попали в заданный прямоугольный сегмент. Центры статических объектов не учитываются при расчете интегральной характеристики сегмента.
На рис. 1 представлен пример динамической системы «Настенные часы». Подвижными объектами системы являются стрелки циферблата.
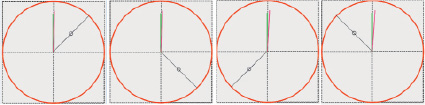
Рис. 1. Пример динамической системы «Настенные часы»
Статическая область системы разбита по ширине и высоте на два фрагмента. За 45 с наблюдения за системой секундная стрелка осуществляет перемещение по часовой стрелке из одного фрагмента статической области в смежный фрагмент. Черным эллипсом отмечен центр секундной стрелки. Изменения положения минутной и часовой стрелки в процессе моделирования 45 с являются незначительными, поэтому их центры не обозначены на рисунке.
Для построения ядра имитационного слоя с датчиков ВАП собирается информация о шаблонах поведения динамических объектов. В рамках системы «Настенные часы» погружаются шаблоны поведения перемещения часовой, минутной и секундной стрелок. Например, для секундной стрелки осуществляется построение 12 моделей статического ВАП в течение одной минуты. Для минутной стрелки также осуществляется построение 12 моделей статического ВАП в течение одного часа. Для часовой стрелки строится 12 моделей в течение 12 часов. В ядро имитационного слоя погружается информация о местоположении центров стрелок динамической системы «Настенные часы», а также информация о динамике изменения положения центров динамических объектов на каждой фазе моделирования для трех сценариев моделирования.
При использовании имитационного слоя динамического ВАП осуществляется погружение окружающих объектов в ВАП. Из ассоциативного слоя ВАП извлекается информация о центрах объектов и взаимосвязей объектов ВАП. Имитационный слой осуществляет фильтрацию объектов ВАП по признаку смещения центров объектов в пространстве. Исходя из базы шаблонов поведения имитационного слоя, осуществляется верификация суперпозиции центров объектов с фазами шаблонов поведения динамического ВАП. На основе метода расчета среднеквадратического отклонения для суперпозиции центров объектов выбирается наиболее вероятная фаза шаблона поведения динамического объекта ВАП.
По характеру изменения объектов динамического ВАП осуществляется классификация объектов ВАП. Более вероятные шаблоны поведения позволяют определить класс объектов, за которыми закреплены эти шаблоны в ядре имитационного слоя ВАП.
При исследовании сложных самоорганизующихся систем канадская лаборатория BioMotionLab разработала программный компонент для моделирования движения человека [6]. На рис. 2 представлена модель спокойной ходьбы мужчины, состоящая из трех фаз.
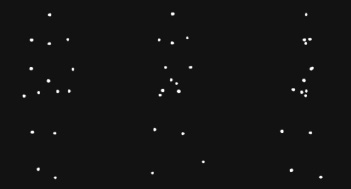
Рис. 2. Модель движения мужчины в проекте BioMotionLab
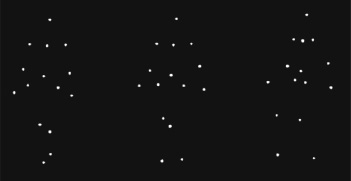
Рис. 3. Модель движения женщины в проекте BioMotionLab
На рис. 3 представлена модель движения женщины в программном компоненте BioMotionLab. Как видно из рисунка, структура опорно-двигательного аппарата человека отличается для разных полов, соответственно, ключевые узлы движения нижних конечностей у женщины расположены дальше от оси позвоночника модели. По характеру движения ключевых точек можно определить пол перемещающегося объекта.
Результаты исследования и их обсуждение
Для исследования имитационного слоя ВАП были взяты открытые шаблоны движения людей разных полов из проекта моделирования движения людей BioMotionLab. На рис. 4 представлены данные, которые были поданы на вход имитационному слою ВАП для моделирования движения людей из открытого выступления актеров на конкурсе мастерства актера раздела «Наблюдение за животными» курса В.А. Сажина театрального института имени Б. Щукина [7].

Рис. 4. Фрагмент исходных данных для моделирования поведения движения
При построении имитационного слоя первоначально строился ассоциативный слой ВАП, на базе которого определялись вершины коммуникационного графа объекта. В качестве тестового объекта был выбран торс актера. К выделенному объекту сцены поочередно выполнялась операция сравнения распределения вершин ассоциативного слоя ВАП и вершин имитационной модели.
В таблице приведены значения координат узлов моделей, где (ax, ay) – координаты узлов графа ассоциативного слоя ВАП, (bx, by) – координаты шаблона модели BioMotionLab.
Сопоставление координат объектов
|
Ni |
ax |
ay |
bx |
by |
|
1 |
127 |
66 |
278 |
26 |
|
2 |
62 |
50 |
262 |
66 |
|
3 |
76 |
34 |
284 |
72 |
|
4 |
74 |
92 |
309 |
61 |
|
5 |
86 |
107 |
273 |
110 |
|
6 |
80 |
81 |
317 |
111 |
|
7 |
96 |
80 |
279 |
131 |
|
8 |
83 |
52 |
264 |
160 |
|
9 |
86 |
94 |
295 |
153 |
|
10 |
126 |
55 |
251 |
213 |
|
11 |
104 |
88 |
301 |
218 |
|
12 |
252 |
287 |
||
|
13 |
335 |
266 |
При сопоставлении координат объектов преобразование системы координат (СК) шаблона поведения BioMotionLab и СК ассоциативного слоя ВАП. При этом СК шаблона BioMotionLab смещается в геометрический центр шаблона и масштабируется по осям X и Y пропорционально отношению длин и ширин габаритных размеров шаблона b и объекта a.
Красными кружками на рис. 5 отмечены позиции узлов ассоциативного слоя статического ВАП, желтыми кружками – позиции узлов шаблона BioMotionLab. Для каждой точки объекта на графе ассоциативного слоя ВАП задается ε окрестность вершин графа и осуществляется подсчет общего числа узлов шаблона, попавших в ε окрестности вершин графа. Отношение числа попавших вершин шаблона к общему числу вершин шаблона формируют вероятность соответствия графа ассоциативного слоя ВАП шаблонному поведению. Для исходного графа ассоциативного слоя ВАП вероятность совпадения с шаблоном BioMotionLab составила 62 %.
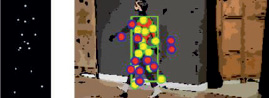
Рис. 5. Результат сопоставления моделей (слева – тестовая фаза шаблона движения мужчины, справа – результат сопоставления узлов моделей)
Заключение
В статье был показан пример построения имитационного слоя виртуального адаптационного пространства. Имитационный слой ВАП позволил усовершенствовать метод классификации объектов ВАП, основанный на ассоциативном слое ВАП, в направлении классификации динамических объектов окружающего пространства. Имитационный слой ВАП оперирует шаблонами поведения динамических объектов, определяя вероятность совпадения распределения узлов ассоциативного слоя ВАП с распределением узлов шаблонов поведения.
Библиографическая ссылка
Дюпин В.Н. Имитационный слой виртуального адаптационного пространства // Современные наукоемкие технологии. 2021. № 11-1. С. 37-42;URL: https://top-technologies.ru/ru/article/view?id=38885 (дата обращения: 02.07.2026).
DOI: https://doi.org/10.17513/snt.38885