



Проблемы экономии энергетических ресурсов как в России, так и для других государств становятся все более актуальными, в связи с постоянным ростом цен на нефтепродукты. Исходя из этого, трудности использования газового топлива становятся все более актуальными. Широко применяют газ в автомобильной технике, но при этом возрастают требования к его качеству. Большой спрос стал у газовых двигателей с мощностью от нескольких десятков до тысяч киловатт, работающих на природном газовом топливе [1–3]. Автономные электростанции такого исполнения находят все более широкую область применения, в том числе на местах газо- и нефтедобычи, а также как аварийные, для питания ответственных объектов. Распространяется использование газовых электростанций в когенерационных установках.
В этом направлении известны газовые двигатели, изготавливаемые заводами России. Общим недостатком этих устройств являются более мягкие механические характеристики по сравнению с дизелями, а также значительно меньшая стабильность оборотов, что приводит к заметным колебаниям частоты электроэнергии, производимой в таких электростанциях. Это приводит, с одной стороны, к проблемам синхронизации отдельных генераторов к общей сети, к колебаниям мощности, преобразуемой как отдельными генераторными агрегатами, так и электростанцией в целом. Помимо этого, воздействием на потребителей, что есть чувствительные к колебаниям частоты [4]. Так как в различных автономных электростанциях применяются статические преобразователи электроэнергии, в таком случае колебания частоты воздействуют на характеристики свойства электроэнергии таких преобразователей. Более восприимчивыми к колебаниям частоты считаются управляемые выпрямители, в силу того, что их системы контроля напрямую объединены с сетями питания. На сегодня задачи анализа влияния колебаний частоты на качество выпрямленного напряжения изучены недостаточно, а проблемы компенсации такого влияния вообще не решены [5–7]. Поэтому задачи этих исследований – влияния колебаний частоты электроэнергии автономных электроэнергетических систем с газовыми двигателями на качественные показатели статических преобразователей – актуальны.
Целью работы является исследование компенсации низкочастотных колебаний частоты приводных газовых двигателей на качество выходного напряжения управляемых выпрямителей, также создание аппаратно-программных систем, специализированных с целью уменьшения воздействия колебаний частоты на выпрямляемое напряжение.
Объект исследования: судовая автономная электроэнергетическая система с газовыми приводными двигателями на мощности до 2000 кВт.
Предметом исследования являются способы снижения влияния колебаний частоты автономных электроэнергетических систем (судовых с газовыми двигателями) на качественные показатели выходного напряжения управляемых выпрямителей.
Методы исследования: чтобы решить поставленные задачи, применялись частотные методы анализа классической теории автоматического управления, основанные на передаточных функциях Лапласа и логарифмических частотных характеристиках. С целью исследования воздействий колебаний частоты применялся метод функции комплексной переменной. Для воздействий колебаний частоты на выпрямляемое напряжение замкнутых вентильных систем применялись методы ЛАЧХ и ЛФЧХ совместно с теорией случайных процессов. При проверке теоретических исследований применялось моделирование процессов в Matlab-Simulink, взаимодействуя с исследованиями экспериментального характера. Вследствие проведенного анализа определено, что специализированные системы импульсно-фазового управления позволяют обеспечить сокращение воздействия колебаний частоты до требуемых значений, но приводят к определенному усложнению систем управления выпрямителями [5, 8, 9].
Анализ эффективности применения систем фазового управления (СФУ) с компенсацией воздействий колебаний частоты
Обеспечения инвариантности выпрямленного напряжения к колебаниям частоты можно предложить два закона управления преобразователем: реальный угол регулирования α изменять с помощью умножения на коэффициент  и стабилизация амплитуды опорного пилообразного напряжения. Рассмотрим первый закон управления преобразователем. Реальный угол регулирования α изменять путем умножения его на коэффициент
и стабилизация амплитуды опорного пилообразного напряжения. Рассмотрим первый закон управления преобразователем. Реальный угол регулирования α изменять путем умножения его на коэффициент  . Данный способ позволяет создать систему управления, исключающую грубые требования к частоте сети питания. Однако имеются трудности, связанные с ресурсоемкими вычислениями, какие следует осуществлять в порядке реального времени. Стремление реализовать такой метод в режиме микроконтроллерной системы управления повергнет или к усилению условий к быстродействию основного процессора этой системы или к катастрофическому уменьшению быстродействию системы. Также неспособности ее функционирования в порядке реального времени при стремлении приобрести в наименьшей степени допустимую точность проделанных ресурсоемких вычислений. Усиление условий к микропроцессору повергнет к увеличению стоимости исследования, а в итоге и повышению цены окончательного изделия. Одной из существующих альтернатив постановления этой трудности считается использование компьютеризированных систем управления.
. Данный способ позволяет создать систему управления, исключающую грубые требования к частоте сети питания. Однако имеются трудности, связанные с ресурсоемкими вычислениями, какие следует осуществлять в порядке реального времени. Стремление реализовать такой метод в режиме микроконтроллерной системы управления повергнет или к усилению условий к быстродействию основного процессора этой системы или к катастрофическому уменьшению быстродействию системы. Также неспособности ее функционирования в порядке реального времени при стремлении приобрести в наименьшей степени допустимую точность проделанных ресурсоемких вычислений. Усиление условий к микропроцессору повергнет к увеличению стоимости исследования, а в итоге и повышению цены окончательного изделия. Одной из существующих альтернатив постановления этой трудности считается использование компьютеризированных систем управления.
В аналогичных системах контроллер осуществляет только получение данных и передачу их согласно каналам взаимосвязи с ПК, который проводит расчеты, а также возвращает контроллеру итоги результатов углов управления в каждый определенный промежуток времени. Описанный метод имеет некоторые минусы: повышение финансовых затрат за счет использования компьютера с индивидуальным узконаправленным программным обеспечением; трудности, вытекающие вследствие обмена данных по каналу связи контроллера с управляющим ПК [10–12]. В случае если вопрос об увеличении финансовой поддержки решается повышением качества работы системы, то трудности, связанные с каналом обмена данных, снижают стабильность работы системы управления. Временные задержки, повышающиеся в канале передачи данных, способствуют сокращению запаса стабильности работы системы согласно фазе. Исходя из того, что системы работают в предельно допустимых режимах, такие задержки по времени могут нарушить работоспособность и привести к сбою. Угроза выхода системы за границы стабильности крайне высока. Другой способ решения проблемы – использование системы управления на базе БИС. Эта концепция даст возможность осуществлять ресурсоемкие расчеты в порядке реального времени. К тому же ее стоимость значительно меньше цены системы на базе компьютера. Помимо этого, в системе отсутствует проблема с временными задержками в канале передачи данных, вследствие этого отсутствуют проблемы с неустойчивостью системы согласно фактору параметрического непостоянства компонентов.
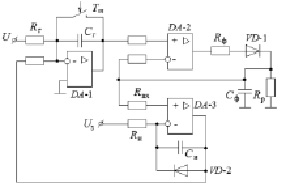
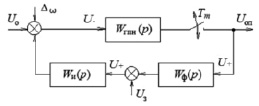
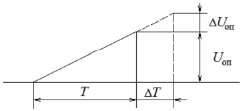
Анализ второго закона управления преобразователем осуществим на примере структуры, реализующей второй закон управления. Образец генератора пилообразного напряжения (ГПН) с контуром подстройки представлен на рис. 1, а. Приведенной принципиальной схеме соответствует структурная схема, изображенная на рис. 1, б. ГПН выполнен на элементах ДА1, Rr, Cr и описывается придаточной функцией ωГПН, ωГПН представляет периодическое изменение пилообразного напряжения [11, 13]:
 (1)
(1)
где ТП – константа времени ГПН.
Применяя разложение экспоненты, формулу (1) преобразуем к виду
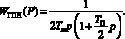
Амплитудный детектор, выполненный на ДА2, Rф, Сф, VД – 1, Rp, описывается передаточной функцией

а
Рис. 1. а – генератор пилообразного напряжения; б – контур подстройки; в – контур подстройки; г – разности ПИ-регулятора (начало рисунка)
б
в
г
Рис. 1. а – генератор пилообразного напряжения; б – контур подстройки; в – контур подстройки; г – разности ПИ-регулятора (окончание рисунка)
где Tф = СфR – постоянная времени фильтра.
Разности ПИ-регулятора амплитуды (ДА3, Rвх, Си, Rи, VД – 2) описываются пропорционально-интегральным звеном (рис. 2), где С – обратное сопротивление диода VД – 2; TИГ = RИCИ
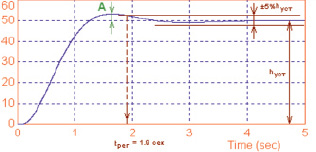
Рис. 2. Переходная функция с ПИ (пропорционально-интегральным)-регулятором
Из рис. 1, г, следует
 (2)
(2)
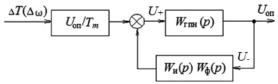
Для анализа прохождения помехи на выход замкнутой системы контура автоподстройки амплитуды пилообразного напряжения, преобразуем [13, 14] структуру, изображенную на рис. 1, б, к типу, подобающему на рис. 1, в, в которой входным воздействием является помеха  . Передаточная функция замкнутой системы будет равна
. Передаточная функция замкнутой системы будет равна
 (3)
(3)
Реальные постоянные времени соответственно равны: ТИГ = 0,0047 c; ТП = 0,012 c; Тф = 0,011 c; ТP = 40.
Колебания частоты сетевых напряжений обладают низкочастотной характеристикой, по этой причине звенья с небольшими константами времени никак не станут воздействовать на протекание помехи посредством системы автоподстройки амплитуды пилообразного напряжения [3]. Рационально по этой причине можно отметить только лишь низкочастотные звенья передаточной функции, упростив этим данную функцию (3):
 (4)
(4)
Представим (4) в виде
где
g2 = ТфТИГ; g1 = ТИГ; g0 = 0; b2 = ТфТm/2; b1 = (Тф + Тm/2 + KPТИГ)/2; b2 = 2
и вводя следующие обозначения




которые можно приближенно анализировать, каким образом сопрягающие частоты ЛАЧХ и ЛФЧХ системы контура автоподстройки частоты. Необходимо определить коэффициент сглаживания случайной помехи 

Пробный контроль системы автоподстройки амплитуды пилообразного напряжения, показанной на рис. 1, а, продемонстрировал то, что коэффициент сглаживания ею дисперсии помехи  доходит до 30 единиц, а система, которая изображена на рис. 3, имеющая астатизм второго порядка, достигает значения в 100–120 ед. Результирующая дисперсия процесса рассчитывается согласно формуле
доходит до 30 единиц, а система, которая изображена на рис. 3, имеющая астатизм второго порядка, достигает значения в 100–120 ед. Результирующая дисперсия процесса рассчитывается согласно формуле

где 
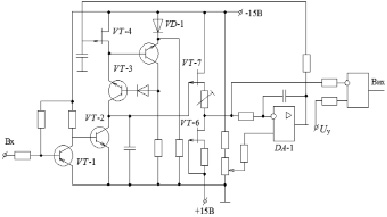
Рис. 3. Система, имеющая астатизм второго порядка
Видимый эффект сглаживания возмущения  прослеживается только при высоких константах времени фильтра, как и в предыдущих вариантах. Но в крайнем случае при соразмерности констант Ta и Tλ эффект сглаживания значительно больше, чем в предшествующих.
прослеживается только при высоких константах времени фильтра, как и в предыдущих вариантах. Но в крайнем случае при соразмерности констант Ta и Tλ эффект сглаживания значительно больше, чем в предшествующих.
Исходя из вышеперечисленного, можно сделать вывод, что общий вид корреляционных функций на выходе сетевых фильтров синхронизации почти не изменяется, в отношении к входу. Но эффект сглаживания помехи по установленному методу расчета фильтров незначительный [6–9].
Заключение
Специализированные системы импульсно-фазового управления позволяют обеспечить сокращение воздействия колебаний частоты до требуемых значений, но приводят к определенному усложнению систем управления выпрямителями. Применялись два метода снижения колебаний частоты, и каждый из них имел свои особенности. Первый метод – регулирование угла α с помощью умножения на коэффициент  . Сложность возникает в том, что в реальном времени необходимо производить ресурсоемкие вычисления, которые снижают быстродействие системы. Второй метод – стабилизация амплитуды опорного пилообразного напряжения. В итоге эффект сглаживания помех на выходе сетевых фильтров присутствует, но незначительный.
. Сложность возникает в том, что в реальном времени необходимо производить ресурсоемкие вычисления, которые снижают быстродействие системы. Второй метод – стабилизация амплитуды опорного пилообразного напряжения. В итоге эффект сглаживания помех на выходе сетевых фильтров присутствует, но незначительный.
Библиографическая ссылка
Синицкий Е.В., Прокофьев А.Е., Соболев В.С., Козаченко Л.Н., Дмитров К.С. МЕТОДЫ ПОДАВЛЕНИЯ НИЗКОЧАСТОТНЫХ ПОМЕХ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ // Современные наукоемкие технологии. 2021. № 8. С. 118-123;URL: https://top-technologies.ru/ru/article/view?id=38789 (дата обращения: 02.07.2026).
DOI: https://doi.org/10.17513/snt.38789