



Развитие робототехники уже сегодня позволяет решать различные социальные проблемы, такие как уход за престарелыми людьми, снижение человеческих потерь в военных конфликтах, управление транспортными средствами и др. Также большое распространение робототехника получила в медицине. Существуют разные категории роботов, используемые в медицине: роботы-ассистенты, различные хирургические системы, роботизированные протезы, но самыми распространенными являются роботы-манекены, имитирующие человека. Такие роботы, как правило, отличаются особенностями конструкций и функциональными характеристиками.
Роботы, копирующие поведение каких-либо животных или людей, имеют большую популярность в сфере аниматроники. Аниматронные фигуры являются роботизированными системами, которые разработаны именно для воспроизведения поведения персонажей, животных и т.д. Аниматронные роботы, как правило, используются как часть аттракционов, театральных представлений, а также розничной продажи для всевозможных развлекательных заведений. Важными характеристиками для таких роботов является точность воспроизведения движений, мимики, характеристики форм и размеров. Кроме больших амплитудных движений, также часто важны мелкие движения, например кистей, пальцев, рта и т.д.
Сейчас можно с уверенностью сказать, что антропоморфные роботы являются очень популярными и востребованными. Данные робототехнические комплексы выделяются особенностями конструкций и функциональными характеристиками [1]. Одной из самых сложных по строению компонентой антропоморфных роботов является рука [2]. Спектр применения данного типа роботов весьма широк. Они востребованы как в космонавтике, так и в медицине и военной сфере. Кроме того, робототехнические руки играют большую роль в сфере развлечения, а также при решении социальных проблем. Например, в решении вопроса обучения жестовому языку слышащих, глухих и слабослышащих людей.
Для решения данной проблемы проектируются антропоморфные роботы-сурдопереводчики, которые обладают функционалом демонстрации жестов на РЖЯ. Основная сложность при создании такого робота – обучить систему коммуникации, то есть воспроизвести движения человеческой руки для каждого жеста. Для достижения цели и такого функционала разработчикам необходимо решить ряд задач: 1) изучение русского жестового языка; 2) формализация жестов; 3) разработка ПО для демонстрации жестов или обучение робота. Первые два пункта имеют исследовательский характер, а разработка требует индивидуального подхода. Данный список задач можно отнести к решению множества проблем, не только для разработки робота-сурдопереводчика, но и различных иных роботов, имитирующих особое поведение людей, например: робот-повар, робот-массажист [3] и т.д.
Существуют различные способы обучения интеллектуальных роботов, но они все требуют индивидуального подхода [4; 5]. Рост технологий дал возможность нового вида обучения – роботы учат роботов. Данный метод подразумевает процесс обучения как запоминание эталонной модели и её воспроизведение. Такой подход даёт возможность унификации обучения и простоты проектирования: разработчикам не нужно глубоко погружаться в моделирование процесса, формализацию задачи, а необходимо только разработать систему, умеющую повторять действия.
Рассматриваемый в статье подход является решением для частной задачи обучения жестам робототехнических комплексов при помощи умного экзоскелета.
Описание экзоскелета
Экзоскелет (рис. 1) спроектирован на основе антропометрических усреднённых данных [6] и электронной модели кисти руки, полученной фотограмметрическим [7] способом. Имеет все необходимые степени свободы для демонстрации дактилем русского жестового языка. Конструктивно часть деталей изготавливается аддитивным способом. В качестве актуаторов используются сервоприводы и линейные приводы. Время автономной работы достигает 5 часов.
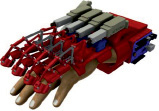
Рис. 1. Электронная модель экзоскелета
Обучение происходит по следующему алгоритму: человек демонстрирует дактилему, надев устройство на свою руку. Экзоскелет запоминает последовательность сигналов, полученных в результате демонстрации. Считывая показания потенциометров каждого из актуаторов, получаем матрицу значений для конкретной буквы. Демонстрация продолжается до тех пор, пока точность обучаемой модели не достигнет заданного нами уровня. Этот способ является прямым методом построения системы управления экзоскелетом [8].
Таблица 1
Значения с потенциометров актуаторов для дактилемы «А»
|
Id |
Letter |
Act_1 |
Act_2 |
Act_... |
Act_N |
|
1 |
А_1 |
80 |
79 |
0 |
180 |
|
2 |
А_2 |
78 |
79 |
0 |
179 |
|
3 |
А_3 |
81 |
82 |
0 |
177 |
|
… |
|||||
|
Id_N |
А_Id_N |
76 |
80 |
0 |
180 |
Примечания: Id – номер измерения, Letter – измеряемая дактилема, Act_N – номер актуатора, с потенциометра которого снимают значения.
В табл. 1 представлены значения с потенциометров актуаторов для серии измерений применительно к дактилеме «А». В качестве итоговых значений для актуаторов экзоскелета принимаются усреднённые значения, определённые по следующей формуле:
Рассматриваем обученный экзоскелет как часть калибровочного макета.
Требования к обучаемым роборукам
Одной из основных проблем при создании антропоморфной руки является имитация действий человека, а именно, повторение мелкой моторики. Наглядным примером применения таких действий является жестовый язык, в котором полностью раскрывается потенциал мышц кисти и руки. Воссоздание такого функционала в роботе – трудоемкий и индивидуальный процесс, так как все системы проектируются различными командами, методиками и алгоритмами.
Предлагается решение использовать экзоскелет для обучения антропоморфных роботов вида «робо-рука». Данное решение нацелено на унификацию подхода обучения роботов. Отличием решения является методика обучения, которое отделяет компоненты экзоскелета и робота в разрезе программного кода, обучение производится путем физического контакта двух робототехнических систем, что дает свободу в выборе механизмов движения, программного кода и компонент робота.
Но к обучаемому роботу применяется ряд требований:
1. Антропоморфность
Экзоскелет-учитель может быть надет только на антропоморфную руку. Должны быть соблюдены допуски по антропометрическим показателям ладони и пальцев. Модель роборуки должна иметь такое же количество степеней свободы, что и человеческая рука или экзоскелет.
2. Обучаемость
Антропоморфная робототехническая рука должна иметь возможность обучения, а именно, система должна запоминать и заносить в базу данных имитацию движений, которые производит экзоскелет. Допустим, производится обучение дактилемам РЖЯ. Экзоскелет производит демонстрацию, при этом антропоморфная рука фиксирует изменения положения актуаторов от начала до конца действия. Такой функционал можно создать при помощи потенциометров, резисторов и т.д.
Экзоскелет с помощью настраиваемых по размеру звеньев устанавливается на обучаемую антропоморфную роботизированную кисть (рис. 2). Сперва запускается проверочный алгоритм, который фиксирует количество степеней свободы роборуки, благодаря обратной связи экзоскелета. Далее начинается процесс тестирования и валидации обучения.

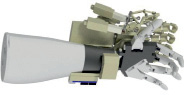
Рис. 2. Экзоскелет на антропоморфной роборуке
Методика проверки результатов обучения
Для определения результатов обучения необходимо провести эксперимент, цель которого – исследовать точность позиционирования фаланг пальцев антропоморфной робототехнической кисти при демонстрации дактилем русского жестового языка.
Объектом эксперимента является механизм движения отдельных фаланг пальцев и пальцев робототехнической системы вида «кисть».
Предметом исследования является выявление точности позиционирования пальцев при передвижении дактилем антропоморфной робототехнической кистью, определение отклонений от человеческой руки и эталонных значений экзоскелета.
Независимая переменная: выбранные конкретные дактилемы.
Зависимая переменная: траектория движения фаланг.
Организация эксперимента: с помощью анализа движений пальцев человеческой и робототехнической кистей при демонстрации определенных дактилем строится модель и выявляются дискретные данные о скорости, углах изгиба и относительного положения фаланг. Таким образом, после сравнения дискретных значений будет сделан вывод о валидности точности позиционирования.
Угрозы валидности:
– Механические погрешности в робототехнической системе.
– Аппаратные погрешности в программном обеспечении.
– Фоновые воздействия на систему.
– Некорректность выбора точек расчета.
Методика проверки
Для эксперимента произведена демонстрация нескольких дактилем. Для валидности эксперимента были выбраны дактилемы с наиболее вариативными траекториями движений фаланг, а именно, буквы А, У, Я, Е, О, К. Дискретные характеристики движений сравниваются с демонстрацией дактилем человеком. В основании каждой фаланги и на кончике пальца выбираются точки расчета. Определение характеристик ведется по выбранным точкам. Для определения корректности демонстрации и точности позиционирования выбраны следующие параметры:
1. Время демонстрации дактилемы
Производится видеозапись демонстрации дактилем антропоморфной кистью и человеческой рукой. Производится замер времени при помощи часов. Начальное положение для демонстрации – дактилема В (все пальцы выпрямлены). Временем демонстрации дактилемы считается отрезок времени от начала движения первой из участвующий фаланг и до времени завершения движений всей системы. Измерения ведутся в секундах до двух знаков после запятой (рис. 3).
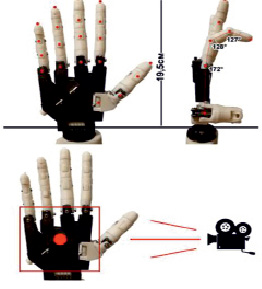
Рис. 3. Методика эксперимента
2. Точность позиционирования
Производится видеозапись демонстрации дактилем антропоморфной кистью и человеческой рукой. Производится сбор дискретных данных о расположении точек расчета. Точность позиционирования рассматриваться в плоскостях Ох и Оу. Точки расчета соединяются отрезками. Угол изменения – это угол между двумя отрезками расчета. Начальное положение – дактилема В.
Так как расположение большого пальца отлично от остальных, методика расчета точности ведется в другой плоскости. Расчет градуса отклонения ведется при помощи транспортира. Эксперимент фиксируется в виде чертежей и математической модели, основанной на фото- и видеоматериале.
Проверка с помощью экзоскелета
Данный метод предполагает проверку точности позиционирования фаланг и времени демонстрации жестов антропоморфной роборукой при помощи экзоскелета. Экзоскелет-учитель переводится в режим «валидации». В данном режиме экзоскелет фиксирует изменения положений фаланг роборуки и выявляет разницу между эталонными показателями и данными, полученными в ходе тестирования. Программно задается, какой жест должен быть проверен экзоскелетом. Система фиксирует начальные положения, а также время начала движения хотя бы одной фаланги роборуки. При остановке фиксируются положение фаланг и время завершения движений. Данные заносятся в базу и рассчитывается разница. В результате выявляется погрешность.
Демонстрация каждой дактилемы производится по три раза для сравнения характеристик и качества работы механизма движения непосредственно робототехнической системы.
Обработка результатов
Для тестирования механизмов движения прототипа был проведен эксперимент с подсчетом времени демонстрации дактилем.
1. Время демонстрации дактилемы
Полученные видеоматериалы обработаны в программном обеспечении Filmora. Выходные данные будут регистрироваться в табл. 2.
Таблица 2
Скорость демонстрации дактилем
|
n |
x |
y (сек) |
Z1 |
Z2 |
Z3 |
|
1 |
А |
0.73 |
0.85 |
0.83 |
0.87 |
|
2 |
У |
0.80 |
0.76 |
0.82 |
0.83 |
|
3 |
Я |
0.98 |
0.96 |
1.01 |
0.95 |
|
4 |
Е |
0.88 |
0.92 |
0.93 |
0.92 |
|
5 |
О |
0.90 |
0.94 |
0.91 |
0.96 |
|
6 |
К |
0.95 |
0.86 |
0.91 |
0.87 |
Примечания: n – номер эксперимента; x – выбранная дактилема; y – время демонстрации человеком; Z1, Z2, Z3 – время выполнения роборукой.
2. Точность позиционирования
Для тестирования полноценного макета проведен эксперимент со сбором точностных характеристик позиционирования. Тестирование проводится при помощи экзоскелета, данные которого считаем эталонными. Расчет идет от нулевой точки (ладонь). Данные программно фиксируются при помощи экзоскелета. Выходные показатели будут регистрироваться в табл. 3.
Таблица 3
Углы демонстрации дактилем
|
n |
x |
y |
F1A1 |
F1A2 |
F1A3 |
|
1 |
А |
1 |
70 |
60 |
23 |
|
2 |
У |
1 |
72 |
83 |
90 |
|
5 |
О |
1 |
72 |
61 |
30 |
|
1 |
А |
2 |
74 |
63 |
24 |
|
2 |
У |
2 |
74 |
80 |
87 |
|
5 |
О |
2 |
72 |
63 |
32 |
|
n |
x |
y |
F2A1 |
F2A2 |
F2A3 |
|
1 |
А |
1 |
90 |
93 |
90 |
|
2 |
У |
1 |
90 |
93 |
90 |
|
5 |
О |
1 |
70 |
80 |
85 |
|
1 |
А |
2 |
91 |
90 |
91 |
|
2 |
У |
2 |
92 |
91 |
93 |
|
5 |
О |
2 |
72 |
82 |
85 |
|
n |
x |
y |
F3A1 |
F3A2 |
F3A3 |
|
1 |
А |
1 |
10 |
10 |
5 |
|
2 |
У |
1 |
8 |
8 |
3 |
|
5 |
О |
1 |
5 |
5 |
2 |
|
1 |
А |
2 |
10 |
10 |
5 |
|
2 |
У |
2 |
8 |
8 |
3 |
|
5 |
О |
2 |
5 |
5 |
2 |
|
n |
x |
y |
F4A1 |
F4A2 |
F4A3 |
|
1 |
А |
1 |
10 |
10 |
5 |
|
2 |
У |
1 |
8 |
8 |
3 |
|
5 |
О |
1 |
5 |
5 |
2 |
|
1 |
А |
2 |
10 |
7 |
3 |
|
2 |
У |
2 |
5 |
4 |
3 |
|
5 |
О |
2 |
5 |
5 |
2 |
|
n |
x |
y |
F5A1 |
F5A2 |
F5A3 |
|
1 |
А |
1 |
3 |
3 |
1 |
|
2 |
У |
1 |
4 |
3 |
3 |
|
5 |
О |
1 |
5 |
5 |
3 |
|
1 |
А |
2 |
7 |
7 |
3 |
|
2 |
У |
2 |
8 |
5 |
2 |
|
5 |
О |
2 |
5 |
4 |
2 |
Примечания: x – выбранная дактилема; y – признак объекта (экзоскелет 1 / роборука 2); F1A1-F5A3 – рассчитанные углы, где F1-F5 – номер пальца (от мизинца (1) до большого (5)), A1-A3 – номер угла, F5A4 – угол между большим пальцем и ладонью.
Тем самым погрешность находится в допустимом значении – не более 10 градусов, что является оптимальным показателем для демонстрации жестов.
Заключение
Экспериментально апробирована разработанная методика верификации точностных характеристик роборук в результате обучения кисти калибровочным макетом, включающим в себя экзоскелет и программное обеспечение, фиксирующее в базу данных изменение положений фаланг. Результаты эксперимента дают основания полагать, что с помощью калибровочного макета возможно с достаточной степенью точности обучать роботизированные комплексы типа «робо-рука», которые соответствуют предъявляемым требованиям.
Библиографическая ссылка
Арутюнян М.Г., Филиппович Ю.Н., Лаврененко И.С. АНАЛИЗ ЭФФЕКТИВНОСТИ КАЛИБРОВОЧНОГО МАКЕТА ДЛЯ ВАЛИДАЦИИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК ПРИ ОБУЧЕНИИ АНТРОПОМОРФНОЙ РОБОТИЗИРОВАННОЙ КИСТИ // Современные наукоемкие технологии. 2021. № 8. С. 16-21;URL: https://top-technologies.ru/ru/article/view?id=38775 (дата обращения: 30.07.2026).
DOI: https://doi.org/10.17513/snt.38775