



В камерных приводах применяют приводные механизмы, имеющие гибкую нерастяжимую или растяжимую оболочку, перемещающую подвижный рабочий орган. Применение различного вида оболочек привело к разнообразию созданных механизмов данного типа, включая оболочковый бесштоковый пневмоцилиндр толкающего типа [1], систему приводов камерных захватных устройств [2], сильфонные приводы криволинейного перемещения [3], торовые и торообразные приводные механизмы, движители [4].
Мембранные приводы, отличающиеся конструктивной простотой, широко применяются в различных отраслях промышленности. При этом для управления используют морально устаревший принцип работы, реализуя требуемые характеристики и регулируя величину давления среды в рабочей камере.
Применение современного метода [5] управления приводов, заключающегося в использовании эффективной площади мембран для управления, повышает эффективность их работы.
Разработка и совершенствование одномембранных приводов, управляемых эффективной площадью мембраны, показали [6] существенное повышение их технических характеристик, включая жесткостную механическую.
Исследования [7] использования эффективной площади камеры в двухмембранном приводе с установленными нерегулируемыми ограничителями изгибной деформации мембран показали не только повышение технических характеристик привода, но и расширение их функциональных возможностей. При этом в приводных механизмах традиционно устанавливают мембраны с разными эффективными площадями.
Двухмембранные приводы отличаются спецификой дифференциальной схемы воздействия рабочей среды на мембраны.
Использование регулирования эффективной площади рабочей камеры теоретически позволяет применить симметричную структуру с одинаковыми эффективными площадями мембран, реализуя «нулевое» положение штока при различных величинах давления в камере рабочей среды питания. Однако данная структура, возможность ее реализации, дрейф нуля положения штока и влияние на него различных факторов не исследовались.
Цель исследования: повышение эффективности работы двухмембранных приводов с жесткими центрами и регулируемой эффективной площадью рабочей камеры.
Материалы и методы исследования
Объектом исследования является результативность эффективности функционирования пневматических мембранных приводов. Предмет исследования – управление двухмембранными приводами регулированием эффективной площади рабочей камеры.
Для осуществления поставленной задачи проведем анализ функционирования двухмембранного симметричного пневмомеханического преобразователя (рис. 1), имеющего рабочую камеру, образованную корпусом, и двух гибких мембран с жесткими центрами, связанными со штоком. Величиной давления рабочей среды создаются левое Fл и правое Fп силовые воздействия на мембраны и результирующее Fшт на шток.
На исходное (нулевое) положение штока, при одинаковых левом и правом жестких центрах, влияет неточность изготовления опор, их заделки, заделки мембран, жесткостные характеристики и остаточная деформация мембран.
В данном преобразователе при абсолютно симметричном исполнении мембран, согласно зависимости (*) эффективная площадь камеры равна нулю, так как Fл равна Fп.
± Fшт = Fл – Fп = р · Sэфф =
= р ·1/3π · (R · rл + rл2 – R · rп – rп2), (*)
где R – радиус мембраны; rл и rп – соответственно радиусы негнущейся опоры левой и правой мембран; Fшт – сила на штоке.
Так как силы, действующие на шток, одинаковые, то повышение давления рабочей среды не должно привести к смещению штока относительно исходного положения.
Однако реально на практике сложно реализовать симметричное исполнение камеры. Кроме этого процесс работы мембран сопровождается возникновением их остаточной деформации, величина которой может быть различной. Отличаться могут и упругие исходные характеристики мембран. Все это затрудняет настройку и регулировку исходного (нулевого) положения штока и обеспечение неизменности его координаты от величины давления в рабочей камере.
Интерес представляет влияние использования в приводе мембран с разной характеристикой упругой деформации.
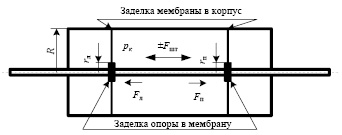
Рис. 1. Схема двухмембранного пневмомеханического преобразователя симметричного исполнения с одинаковыми эффективными площадями мембран

а) б)
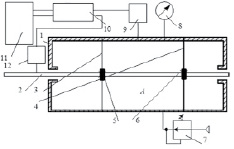
Рис. 2. Лабораторный стенд двухмембранного привода: а) схема стенда; б) вид общий.
Исследования данного привода проводились на лабораторном стенде (рис. 2).
Двухмембранный приводной механизм (рис. 2, а) состоит из корпуса 1, в котором установлен шток 2, выполненный с возможностью продольного перемещения.
В корпусе закреплены мембраны 3 и 4, связанные между собой штоком. Левая мембрана однослойная, а правая – двухслойная. В мембранах выполнены одинакового размера опоры штока 5 и 6. Мембраны образуют с корпусом герметичную камеру А, которая выполнена с возможностью соединения через редукционный клапан 7 с источником пневмопитания, величина которого настраивается манометром 8. С датчика давления 9 сигнал поступает через АЦП 10 на ПЭВМ 11. На штоке установлен резистивный датчик 12 его линейного перемещения, сигнал с которого поступает через АЦП на ПЭВМ.
Результаты исследования и их обсуждение
Исследования показали, что при симметричном исполнении элементов механизма в статике, разница в величине упругой деформации мембран существенно не влияет на зависимость положения штока, при изменении давления рабочей среды в камере.
Однако величина изменения давления оказывает существенное влияние на изменение положения штока в динамике. Возникает колебательный процесс, при котором шток сначала перемещается в сторону расположения однослойной мембраны (рис. 3).
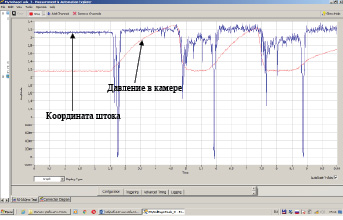
Рис. 3. Осциллограмма координаты штока и давления в рабочей камере, образованной мембранами с разными характеристиками упругой деформации
Данный процесс объясняется тем, что однослойная левая мембрана, обладающая, по сравнению с правой, меньшей изгибной жесткостной характеристикой, от воздействия на нее давления рабочей среды, изгибается с опережением правой. Возникающая при этом кинетическая энергия движения мембраны, направленная влево, приводит к первоначальному смещению штока в данном направлении.
Таким образом, на характеристики двухмембранного привода влияет множество факторов, включая размеры элементов и погрешность их изготовления; опоры штока; заделки мембран, свойства используемых материалов мембран.
Недостатками привода являются:
- трудность настройки «нулевого» положения штока;
- зависимость «нулевого» положения штока от величины давления рабочей среды в рабочей камере;
- низкая механическая жесткостная характеристика положения рабочего органа от нагрузки;
- значительное влияние на характеристики привода изменений свойств мембран, например, остаточной деформации.
Регулирование силового воздействия от давления в рабочей камере на шток величиной его опоры позволяет устранить данные недостатки.
Предложена методика настройки и стабилизации «нулевого» положения штока двухмембранного приводного механизма, заключающаяся в том, что в исходном положении максимально увеличивают эффективную площадь каждой из мембран, путем установки с внешней стороны камеры дополнительных ограничителей их изгибной деформации.
Данная методика реализована устройством, показанном на рис. 4, а.
Ограничители закреплены на штоке и выполнены в виде пластин-упоров с радиальными размерами, меньшими R. Они не соединены с поверхностью мембран, что не изменяет их изгибную рабочую поверхность.
а) 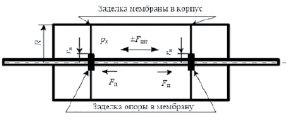
б) 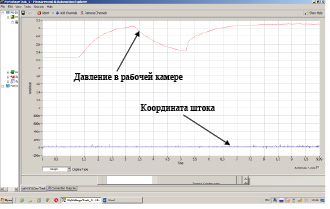
Рис. 4. Двухмембранный пневмомеханический преобразователь с ограничителями изгибной деформации мембран: а) схема; б) осциллограмма координаты штока и давления в рабочей камере
Проведены исследования влияния изменения величины давления пневмопитания, в рабочей камере приводного механизма, на положение штока.
На рис. 4, б, показан характер зависимости положения штока от величины давления в рабочей камере.
Графики показывают, что изменение величины давления в рабочей камере привода от нуля до 0,4 атм не приводит к изменению начального положения штока.
Установку «нулевого» положения штока для всего диапазона рабочего давления в камере реализуют настройкой и регулировкой усилий прижатия ограничителей к мембранам.
Предложенная методика и устройство для его реализации открывают возможность повышения жесткостной механической характеристики привода.
Для подтверждения данного предположения проведены натурные исследования влияния внешнего силового воздействия на положение штока при давлениях в камере от нуля до 0,4 атм. Результаты исследований показаны на рис. 5.
В данном устройстве при полезной нагрузке до 60 Н установка ограничителей изгибной деформации мембраны позволяет существенно уменьшить зависимость влияния внешнего силового воздействия на привод с сохранением хода подвижного рабочего органа.
Механическая характеристика привода по интегральной оценке повышается примерно в 11,1 раза.
Таким образом, предложенная методика и устройство для ее реализации позволяет легко настраивать и стабилизировать «нулевое» положение штока двухмембранного приводного механизма. В разработанном двухмембранном приводе существенно повышена его механическая характеристика.
Требуемое перемещение штока осуществляют отведением ограничителей от мембраны. Например, перемещение правого ограничителя (рис. 4) приводит к уменьшению эффективной площади правой мембраны и уменьшению Fп при неизменном силовом воздействии рабочей среды на шток, направленном влево. В результате шток перемещается влево.
Ограничители закреплены на штоке и выполнены в виде пластин-упоров с радиальными размерами, меньшими R. Они не соединены с поверхностью мембран, что не изменяет их изгибную рабочую поверхность.
Проведены исследования влияния изменения величины давления пневмопитания, в рабочей камере приводного механизма, на положение штока.
На рис. 4, б, показан характер зависимости положения штока от величины давления в рабочей камере.
Графики показывают, что изменение величины давления в рабочей камере привода от нуля до 0,4 атм не приводит к изменению начального положения штока.
Установку «нулевого» положения штока для всего диапазона рабочего давления в камере реализуют настройкой и регулировкой усилий прижатия ограничителей к мембранам.
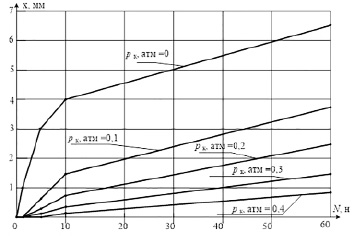
Рис. 5. Графики зависимости положения штока от силового воздействия на него
Предложенная методика и устройство для его реализации открывают возможность повышения жесткостной механической характеристики привода.
Управление эффективной площадью камеры двухмембранного преобразователя выполнялись аналогично управлению одномембранного привода [6] путем установки на штоке дополнительной камеры управления.
Заключение
1. Проведенным анализом применения управления двухмембранных приводов, регулированием эффективной площадью рабочей камеры, выявлены недостатки, необходимость и возможность их совершенствования.
2. Установлено, что при симметричном исполнении элементов приводного механизма, изменение давления в рабочей камере существенно снижает его динамическое характеристики.
3. Предложенная методика настройки двухмембранного приводного механизма, позволяет упростить настройку и стабилизировать «нулевое» положение рабочего органа.
4. В разработанном двухмембранном приводе с регулируемой эффективной площадью рабочей камеры существенно повышена его механическая жесткостная характеристика.
Библиографическая ссылка
Сысоев С.Н., Данг Х.Л., Королев В.Е. ИССЛЕДОВАНИЕ КАМЕРНОГО ДВУХМЕМБРАННОГО ПРИВОДА С ОГРАНИЧИТЕЛЯМИ ИЗГИБНОЙ ДЕФОРМАЦИИ ОПОР ШТОКА // Современные наукоемкие технологии. 2021. № 6-2. С. 282-287;URL: https://top-technologies.ru/ru/article/view?id=38735 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.38735