



Рост экономики страны невозможен без развития инфраструктуры, одной из составляющей которой является сеть автомобильных дорог в целом и лесовозных дорог в частности. Строительство сети лесовозных дорог обеспечивает доступ к лесным ресурсам и является одной из наиболее затратных статей расходов для лесозаготовительных предприятий. Дороги относятся к разряду капиталоемких линейно протяжённых инженерных объектов, проектирование которых представляет во времени и пространстве сложный и многофункциональный процесс. Основой формообразования будущей дороги является ее трасса, а очертания этой трассы во многом определяют технические и транспортно-эксплуатационные качества будущей дороги. Необходимо учитывать денежные и материальные затраты, а также полученный экономический и ландшафтно-архитектурный эффект, удовлетворяющий непрерывно возрастающему культурному уровню населения.
В проектах лесовозных автомобильных дорог в качестве элементов плана трассы встречаются прямые линии, переходные кривые, описываемые в последние годы чаще всего по клотоиде, и круговые кривые. Кривые линии могут быть также подразделены при анализе перспективных изображений по направлению их изогнутости на левые и правые, а переходные кривые, по их отношению к направлению движения лесовозного подвижного состава, на входные и выходные. Продольный профиль, как правило, проектируют, используя горизонтальные и наклонные прямые, вогнутые и выпуклые параболы (или круговые кривые). Обычно применяемые элементы плана и профиля трассы могут образовать 28 взаимных сочетаний (комбинаций) [1]. Таким образом, путем сочетания элементов плана и профиля получаются элементы трассы в пространстве.
Возможность повышения качества проектных решений лесовозных автомобильных дорог связана с учетом зрительного восприятия трассы. Вид дороги в перспективе должен ориентировать водителя, быть зрительно ясным, обеспечивать постоянство режима движения транспортного потока.
Существует ряд методов проверки зрительной плавности и ясности проектируемых лесовозных автомобильных дорог. Наиболее широко ясность и плавность дороги оценивают по ее наглядным изображениям, т.е. по перспективам и моделям. Однако оценка перспектив и моделей во многом зависит от квалификации проектировщика и поэтому зачастую субъективна. Кроме того, отсутствуют общепризнанные и теоретически обоснованные рекомендации по выбору точки зрения для анализа плавности дороги по перспективным изображениям. Целью работы является анализ современных проектных решений лесовозных автомобильных дорог и их рассмотрение с точки зрения возможных экономических потерь.
Выбор методов исследования условий зрительной плавности и ясности лесовозных автомобильных дорог
В случае неудачного выбора точек зрения или при недостаточном их количестве предварительная оценка проектирования оказывается малоэффективной. Неудачные участки, которые позже приведут к денежным убыткам компании грузоперевозок, обнаруживаются только на построенной дороге, когда их исправление уже невозможно. До последнего времени построение перспективных изображений являлось весьма трудоемким процессом, чем объясняется недостаточность проверок плавности и ясности в практике работы проектных организаций.
Опыт показал, что проверку плавности лесовозных автомобильных дорог по ее гибким универсальным моделям в настоящее время можно признать наиболее всесторонней. Принимая точки зрения на каждом пикете, а при необходимости и чаще, можно обнаружить неплавные или неясные участки лесовозной автомобильной дороги. С повышенных точек трассы можно также проверить ее гармоничность в целом в пределах участков, открытых для обозрения.
Метод моделирования позволяет просто и быстро определить нужные для повышения степени плавности и ясности исправления плана и профиля и является особо удобным при проектировании вариантов. Точность построения моделей пока еще отстает от перспективных изображений. Поэтому для характерных точек зрения, установленных по модели, приходится строить перспективные изображения для тех участков, где нужна более точная оценка плавности и ясности.
Аналитический метод контроля плавности и ясности будет обеспечивать возможность применения креативных критериев оценки и позволит использовать возможности автоматизированного проектирования для определения характеристик.
Наиболее распространенные элементы трассы изображены на рис. 1. Поскольку скорость движения в основном определяется кривыми плана и продольными уклонами, а нормы закруглений профиля определяются из условий обеспечения опасности движения, то названия элементов трассы целесообразно определять, принимая за основу элементы плана: прямую, переходную и круговую кривую. Названия основных элементов трассы согласно рис. 1 представлены на рис. 2.
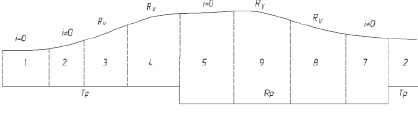
Рис. 1. Схема разбивки трассы на элементы: Rp , Rv – радиусы кривых в плане и продольном профиле; Tp – прямая в плане; i – продольный уклон; 1–9 – элементы трассы
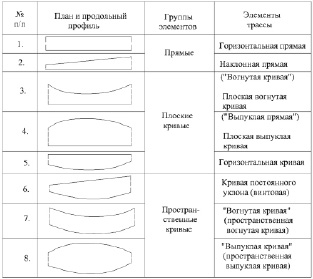
Рис. 2. Основные элементы трассы
Составленная из ряда пространственных или плоских линий трасса может быть описана в целом лишь неэлементарной функцией, которая определена несколькими аналитическими выражениями для различных интервалов изменения аргумента.
Основными характеристиками элементов трассы являются их теоретические параметры, протяженность, уклоны, а также формирование в перспективе. Эти параметры обусловливают предел безопасной скорости движения лесовозного автопоезда. Этот предел водители улавливают интуитивно, нередко при этом ошибаясь. Завися от внешних природных условий (дождь, гололед и др.), предел безопасности скорости существенно меняется в течение года. Считается, что полностью безопасный режим движения можно осуществить только при автоматическом управлении автомобилем, когда исключается возможность ошибок водителя [2–4].
В системе «дорога – автомобиль – водитель» элементы трассы оказывают на скорость движения косвенное влияние через восприятие водителем их сочетаний, который оценивает крутизну поворотов и уклонов зрительно и по ощущению ускорений вестибулярным аппаратом. При этом водитель управляет автомобилем на режиме, который ему кажется безопасным и удобным, как правило, отклоняясь от предельно возможного безопасного режима. Наблюдения показывают, что ошибки в оценке скорости иногда достигают 30–50 % [5].
Отклонения от предельно безопасного режима движения в сторону уменьшения скорости ведут к повышению себестоимости перевозок, т.е. к экономическим потерям. А превышение же скорости является причиной дорожно-транспортных происшествий, и создается угроза критических ситуаций.
Результаты исследования и их обсуждение
Водитель автомобиля при движении смотрит на дорожное полотно под малым углом зрения. Воспринимаемая его глазами картина является центральной проекцией (перспективой) дороги. Примерно 80 % информации, нужной для управления автомобилем, водитель воспринимает при помощи зрения. Поэтому вид дороги в перспективе является основным источником информации, исходя из которой водитель должен безошибочно воспринимать направление дороги в плане, а также выбирать безопасную скорость. Поэтому перспектива лесовозной автомобильной дороги в первую очередь должна быть верно ориентирующей, или, как принято называть, зрительно ясной.
На рис. 3 и 4 приведены перспективные изображения некоторых типичных участков трассы, часто встречающихся на дорогах. Короткая вертикальная кривая в пределах кривой в плане создает в перспективе зрительное впечатление «просадки» проезжей части (рис. 3). При скорости движения 80 км/ч взгляд водителя сосредотачивается на расстоянии 500 м впереди автомобиля. Если на пути расположен зрительно крутой поворот, вполне вероятно и снижение скорости, несмотря на то, что элементы плана и профиля обеспечивают возможность проезда без такого снижения.
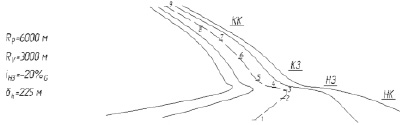
Рис. 3. Кривая в плане, перекрывающая вертикальное закругление: НК, КК – начало и конец кривой в плане; НЗ, КЗ – начало и конец вертикальной кривой; бн – смещение точек НК и НЗ; Rp, Rv – радиусы кривых в плане и продольном профиле; iНЗ – продольный уклон
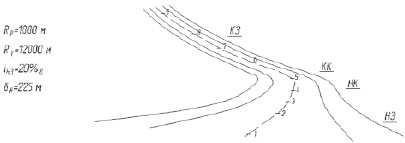
Рис. 4. Короткая кривая в плане, размещенная в пределах вертикальной кривой: НК, КК – начало и конец кривой в плане; НЗ, КЗ – начало и конец вертикальной кривой; бн – смещение точек НК и НЗ; Rp, Rv – радиусы кривых в плане и продольном профиле; iНЗ – продольный уклон
Если кривая в плане значительно короче вертикальной кривой (рис. 4), дорога в перспективе получает неспокойный, негармоничный вид. Проезд такого участка связан с повышенной эмоциональной напряженностью водителя.
Нередко пологие в плане воспринимаются издалека как резкие повороты или изломы дороги, что также заставляет водителей снизить скорость [6]. Результаты исследований [7] показали, что снижение скорости на подходах к кривым достигает 10–15 % по сравнению со скоростью на прямом участке.
Установлено, что чем меньше радиус кривой, тем значительнее эмоциональная напряженность водителя [7]. В равнинной местности наиболее заметное влияние на скорость движения оказывают кривые, радиусом менее 400 м, а повышенная эмоциональная напряженность водителей наблюдается на подъездах к кривым, радиус которых меньше 800 м.
Места резкого снижения скорости являются потенциальными местами дорожно-транспортных происшествий [8–10]. Поэтому дорога должна плавно изменять свое направление в перспективе для обеспечения динамической постепенности режима движения и, следовательно, повышения ее эффективности. Наличие структурированных данных о том, какие сочетания параметров плана и профиля наилучшим образом обеспечивают зрительную плавность и ясность поворотов трассы лесовозной автомобильной дороги, улучшает бедующие проектные решения.
Выводы
Развитие лесовозных дорог и их расположение относительно лесных ресурсов является одним из важных экономических факторов, способствующих расширению предприятий лесного хозяйства.
Признано, что зрительная плавная и явная дорога обеспечивает постоянный или плавно переменный режим движения, уменьшает напряженность и утомляемость водителя, снижает транспортные затраты в результате выбора наиболее оптимального режима движения. Поэтому задача повышения качества проектных решений, а как следствие, повышение эффективности лесовозных автомобильных дорог остается весьма актуальной.
Основными причинами часто получавшихся неудачных сочетаний кривых плана и продольного профиля являются недостаточная изученность зрительной ясности и особенно плавности, недостаточный опыт практического использования в проектных организациях известных принципов пространственного проектирования лесовозных автомобильных дорог и трудоемкость применяемых методов контроля зрительной плавности и ясности. Предлагается:
- более подробное изучение условий зрительной ясности и плавности и формулирование рекомендаций по проектированию поворотов дороги;
- разработка более простых методов контроля плавности и ясности, требующих значительно меньших затрат времени, чем при построении перспективных изображений.
Таким образом, рекомендуется, чтобы сочетания смежных элементов трассы обеспечивали возможность движения автомобилей с постоянной или плавно изменяющейся скоростью. Для этого при проектировании некоторых автомобильных магистралей должно соблюдаться условие, согласно которому изменение скорости на соседних элементах трассы не должно было превышать 8–13 км/ч.
Качество проектных решений в первую очередь влияет на рациональное положение трассы и на многие годы определяет ее экономическую эффективность и транспортно-эксплуатационные характеристики (скорость, уровень безопасности, пропускную способность и пр.).
Библиографическая ссылка
Боровлев А.О., Высоцкая И.А., Скрыпников А.В., Тихомиров П.В., Никитин В.В., Мацнев М.В., Болтнев Д.Е. Повышение эффективности лесовозных автомобильных дорог // Современные наукоемкие технологии. 2021. № 4. С. 9-13;URL: https://top-technologies.ru/ru/article/view?id=38607 (дата обращения: 29.06.2026).
DOI: https://doi.org/10.17513/snt.38607