



Решение проблем протезирования утраченных частей тела является важной отраслью научно-инженерной деятельности. Наиболее остро на данный момент стоит задача обеспечения интерфейса между нервной системой человека и системой управления протезом.
Проблема регистрации электрической активности мышц в большей степени заключается в большой разнице амплитуд исследуемого биопотенциала и помех, возникающих при измерении, часто на порядки превышающих исследуемый сигнал.
Цель исследования: анализ и решение проблем помехозащищенности портативного миографического сенсора мышечной активности для управления мехатронными модулями, при использовании его в различных условиях внешней среды. По завершению, для проверки результатов исследования, будет изготовлен прототип портативного миографического сенсора.
Материалы и методы исследования
Исследование биопотенциала мышц может производиться двумя способами:
- С помощью введённых в мышцу игольчатых электродов. Улавливают колебания потенциала в отдельных мышечных волокнах или в группе мышечных волокон, иннервируемых одним мотонейроном.
- С помощью электродов для неинвазивного съема биопотенциала. Данный метод измерения отражает процесс возбуждения мышцы как целого [1].
Все используемые отведения можно разделить на биполярные, или двухполюсные, в случае если оба электрода являются измерительными и разность потенциалов регистрируется между двумя точками на поверхности тела, и униполярные. При униполярных измерениях один электрод является измерительным, а другой используется как нулевой, индифферентный. Униполярное измерение позволяет регистрировать биоэлектрическую активность под точкой расположения электрода. Выделяют также многоэлектродные измерения, когда в требуемых точках исследуемого объекта накладываются две группы электродов, а электроды каждой группы соединяются через суммирующие цепи, образуя две ветви отведения. Реализация указанных классов измерения для разных методов исследования биопотенциалов различна [2].
В данной работе был выбран метод биполярной неинвазивной регистрации биопотенциалов, поскольку этот метод позволяет отслеживать суммирующую активность определенной мышцы целиком. Это улучшит интенсивность исходного сигнала и позволит зарегистрировать даже незначительную активность отслеживаемой области [3]. Использование данного метода не подразумевает хирургической установки электродов, однако такой метод включает в результат измерение влияние целого спектра помех.
Искомый сигнал является суммой множества одиночных импульсов отдельных мышечных волокон, захваченных площадью электрода (рис. 1).
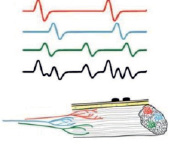
Рис. 1. Процесс образования результирующего биопотенциала
Исходя из медицинских исследований на стационарном миографе [4], частота исходного сигнала лежит в довольно широком диапазоне частот 5–5000 Гц, при этом его амплитуда варьируется в пределах 0,1–10 мВ. Для регистрации такого рода сигналов можно использовать прецизионный дифференциальный усилитель (рис. 2). Дифференциальный усилитель изначально имеет некоторый коэффициент ослабления синфазного сигнала (КОСС). Для удобства использования зачастую принято КОСС выражать в децибелах. У операционных усилителей общего назначения он обычно порядка 90дб, у прецизионных может доходить до 130дб и выше.
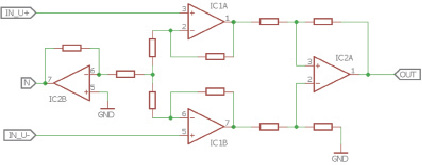
Рис. 2. Схема регистрации биопотенциала инструментальным усилителем
Наибольшее влияние на полезный сигнал, при использовании миографа в бытовых помещениях, имеют следующие факторы:
1. Наведенное напряжение бытовой сети 50Гц.
2. Синфазная составляющая сигнала.
3. Высокочастотные помехи, от импульсных преобразователей и источников питания.
4. Высокое сопротивление участка элек- трод – поверхность.
При использовании портативного миографа наведенное на электроды напряжение сетью 50 Гц в среднем достигало 10 вольт. Учитывая, что полезный сигнал измеряется в микровольтах, необходимо в первую очередь избавиться от наиболее существенной помехи. Для дальнейшей работы было решено использовать тот факт, что изменение частоты бытовой сети согласно ГОСТ 29322-2014, не должно быть больше чем на 0,4 % в обе стороны. Используя режекторный фильтр, рассчитанный на 50Гц, удалось подавить наведенное напряжение с выбранной частотой до значения почти на порядок меньше минимального значения полезного сигнала.
На этом этапе есть возможность уменьшить влияние наиболее весомой, синфазной помехи, а также несколько нивелировать сопротивление электрод – поверхность. Если снимать синфазный сигнал помехи, инвертировать его и подавать обратно на поверхность кожи, то можно существенно увеличить показатель компенсации асимметрии измерения. В миографии этот прием по искусственному увеличению КОСС принято называть «Активной землей» [2]. На схеме (рис. 2) она реализована на ОУ «IC2B». Комбинируя этот метод с остальными, можно существенно повысить общий КОСС системы.
Далее, поскольку полезный сигнал лежит в очень широком диапазоне, в качестве компрессора сигнала, для увеличения динамического диапазона, был применен логарифмирующий фильтр.
В конечном счете требуется получить зависимость вида Интенсивность сигнала – Напряжение. На выходе все еще идет работа с двухполярным напряжением +-5В; для преобразования его в однополярное, а также для увеличения интенсивности выходного сигнала был применен активный двухполупериодный выпрямитель.
Затем полученный сигнал пропускается через активный фильтр низких частот и поступает на вход АЦП микроконтроллера. Преимущество данной схемы состоит в том, что высокое входное сопротивление ОУ защищает фильтр от высокой нагрузки на выходе, а небольшое выходное сопротивление не позволяет смещаться частоте сигнала от изменения сопротивления входного сигнала. Хотя эта схема обеспечивает высокое постоянство характеристикам фильтра, ее главным недостатком является то, что она не дает коэффициент усиления превышающего единицу. Однако, хотя коэффициент усиления и равен 1, усиление по мощности составляет много больше единицы, а выходное сопротивление выходит значительно ниже входного.
На этом аналоговая обработка сигнала завершена. Схема аналоговой части устройства изображена на рис. 3.
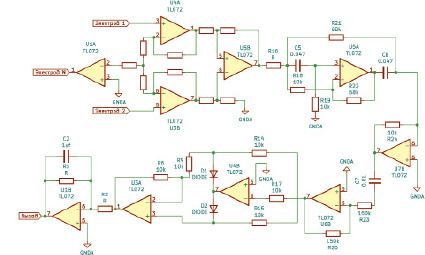
Рис. 3. Схема фильтрации полученного сигнала
Для оцифровки полученного сигнала был использован 12-битный АЦП с уравновешиванием заряда. Беря во внимание теорему Котельникова о дискретизации сигнала с ограниченной полосой, частота выборок должна быть вдвое больше верхней частоты исходного сигнала. Согласно исследованиям [5], верхняя частота мышечного биопотенциала 5 кГц. Исходя из этого, АЦП с большим запасом делает выборки с частотой 615,384 кГц.
Полученный сигнал обрабатывается программным фильтром Калмана. Поскольку расчеты будут проводиться на контролере со сравнительно невысокой частотой в 8МГц, будет использован несколько облегченный алгоритм фильтрации. Фильтр Калмана предназначен для рекурсивного дооценивания вектора состояния априорно известной динамической системы, то есть для расчёта текущего состояния системы необходимо знать текущее измерение, а также предыдущее состояние самого фильтра. Таким образом, фильтр Калмана, подобно другим рекурсивным фильтрам, реализован во временном, а не в частотном представлении, но, в отличие от других подобных фильтров, фильтр Калмана оперирует не только оценками состояния, а ещё и оценками неопределённости (плотности распределения) вектора состояния, опираясь на формулу Байеса условной вероятности [6]. На практике в чистом виде данный фильтр используется редко. Обычно принимается его упрощенная версия, без матриц и объемных систем уравнений. В нашем случае будет использована одна формула, которая выводится из исходных матриц, при условии, что мы пренебрежем расчетом управляющего воздействия. Формула в конечном итоге имеет следующий вид:
Mn = k*An + (1 – k)* Mn–1,
где Mn – результирующее значение текущего вычисления,
k – коэффициент стабилизации,
An – исходное значение текущего измерения,
Mn–1 – результирующее значение предыдущего вычисления.
Потребуется подобрать этот коэффициент стабилизации под требуемое быстродействие, он должен быть в диапазоне от 0 до 1. Чем меньше коэффициент, тем сильнее сглаживаются данные, но при этом увеличивается время стабилизации [7].
Для передачи полученных данных будет использован радиомодуль nRF24L01. Приемо-передатчик действует в свободном диапазоне ISM (от 2400 до 2483,5 МГц) и имеет программируемую мощность передатчика в диапазоне от 6 до 18 дБм. Для минимизации влияния радиомодуля на схему измерения передатчик был экранирован от остальной части корпуса, а использование функции программирования мощности позволяет при необходимости снизить мощность передатчика до 6 дБм.
Отдельной задачей стояла организация питания устройства. Разнородные части схемы требовали два вида напряжений: двухполярное, для питания прецизионных операционных усилителей всей измерительной части схемы, и однополярное, для питания цифровой части. В частности, проблему создавало импульсное потребление радиомодуля в момент передачи данных. На двухполярное напряжение, для питания аналоговой части, накладывалось требование обеспечения максимально возможной стабильности выходного напряжения. Этот параметр напрямую влияет на качество полученного сигнала. Для его формирования был выбран преобразователь TPS65135RTER.
Питание радиомодуля было организовано с дополнительными демпфирующими конденсаторами для сглаживания импульсного потребления при передаче, а также блокирующими конденсаторами малой емкости для подавления выбросов обратно в шину питания.
Шумовые свойства аналогового усилителя зависят от внутреннего сопротивления источника сигнала, входного сопротивления и способа построения первых каскадов усиления. Наибольшее влияние на уровень шума оказывают параметры активных элементов. Внутренние шумы биполярных транзисторов складываются из тепловых шумов омических сопротивлений полупроводника, дробовых шумов токов p-n-переходов и шумов токораспределения. Тепловые шумы в общем случае возникают в области базы, коллектора и эмиттера, однако на практике учитывают только тепловые шумы сопротивления базы [8]. Исходя из этого, имеет смысл перенести большую часть работы с сигналом за этап его оцифровки.
Результаты исследования и их обсуждение
Основываясь на требованиях и решениях изложенных в предыдущих пунктах работы, было изготовлено портативное устройство для регистрации электрической активности мышц, фильтрации и передачи полученного сигнала на внешнее устройство (рис. 4). В ходе испытаний были проведены замеры в разных условиях, с различным фоном и интенсивностью электромагнитных помех.


а) б)
Рис. 4. a) фото портативного миографа в процессе калибровки; б) готовое устройство
В момент проведения испытаний замеры показали, что доля синфазных помех в пике составила 0,93 % от максимального значения полезного сигнала. То есть при используемом диапазоне 5 В, при максимальной интенсивности полезного сигнала, значение наводимой помехи доходило до 0,0465 В.
Выводы
В ходе испытаний подтвердилось, что наиболее значимым является влияние разностных помех, это ярко выражается при механическом воздействии на один из электродов, использование электродов с твердым гелием или токопроводящего раствора позволяет в значительной степени нивелировать этот фактор.
Радиопередатчик 2,4 ГГц, расположенный в непосредственной близости от аналоговой части, влияния на работу схемы не оказал.
Решение использовать выходной диапазон 0–5 В улучшило качество выходного сигнала, в сравнении с более удобным в оцифровке диапазоном 0–3,3 В. Однако ввело некоторые ограничения в способе оцифровки сигнала. Диапазон 0–5 В подразумевает использование АЦП с питающим напряжением, равным диапазону или выше его. Наиболее же производительные контроллеры со встроенным АЦП в большинстве рассчитаны на питающее напряжение 3,3 В. Однако, как в данном случае, из этой ситуации можно выйти, используя внешний блок АЦП.
Одним из теоретических способов повышения качества сигнала может быть замена аналогового фильтра низких частот его программной реализацией. Это, очевидно, несколько повысит вычислительную нагрузку на процессор, однако позволит избавиться от шумов, наводимых в аналоговом фильтре.
Библиографическая ссылка
Баталов А.В., Веселов О.В. РЕГИСТРАЦИЯ И ОБРАБОТКА СИГНАЛА БИОЭЛЕКТРИЧЕСКОЙ АКТИВНОСТИ МЫШЦ ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ БИОНИЧЕСКОГО ПРОТЕЗА // Современные наукоемкие технологии. 2020. № 12-2. С. 263-268;URL: https://top-technologies.ru/ru/article/view?id=38444 (дата обращения: 02.08.2026).
DOI: https://doi.org/10.17513/snt.38444