



В современном машиностроении и приборостроении для реализации криволинейного перемещения рабочего органа широко применяются камерные гидравлические и пневматические приводы, принцип работы которых заключается в изменении геометрии камеры под воздействием давления рабочей среды.
Для их функционирования используются различные приводные механизмы, в которых увеличение давления рабочей среды в камере, например «трубки Бурдона» [1; 2], приводит к выпрямлению изогнутой упругой трубки, а в сильфонных механизмах [3; 4] с несимметричной упругой деформацией гофр – к его изгибу. При этом криволинейные перемещения осуществляются только по одному радиальному направлению, задаваемому упругими характеристиками и геометрией оболочки используемой камеры, что ограничивает область их применения.
В мобильных шагающих аппаратах [5] применяют приводы с расширенной областью использования, где направление криволинейного перемещения задается в процессе их функционирования. В таких приводах наибольшими силовыми характеристиками изгиба камеры обладают сильфонные приводы [6], криволинейное перемещение рабочего органа в которых осуществляется силовым воздействием избыточного давления рабочей среды. Повышенные силовые характеристики изгиба сильфона достигаются путем установки центральной гибкой нерастяжимой тяги, ограничивающей линейное растяжение сильфона и создающей неустойчивость его симметричного расположения. Возможность осуществления криволинейного перемещения в требуемом радиальном направлении позволяет использовать его в шагающих мобильных роботах.
Однако данный привод в условиях специфики функционирования ноги шагающего аппарата обладает недостатками, ограничивающими эффективность его работы:
– низкие величины силовых характеристик выпрямления сильфона, которые должны быть существенно выше характеристик его изгиба;
– необходимость применения в качестве энергопитания давления разрежения воздуха ограничивает возможность повышения силовых характеристик привода;
– необходимость использования в качестве энергопитания избыточного давления и давления разрежения воздуха усложняет конструкцию и управление.
Цель исследования: повышение эффективности работы приводов криволинейного перемещения ноги шагающего аппарата путем разработки и исследования нового сильфонного пневмомеханического преобразователя.
Материалы и методы исследования
Объектом исследования являются пневматические приводы шагающих мобильных аппаратов. В качестве предмета исследования приняты сильфонные приводы криволинейного перемещения с центральной тягой.
Для реализации поставленной цели проведем анализ возможности устранения указанных выше недостатков.
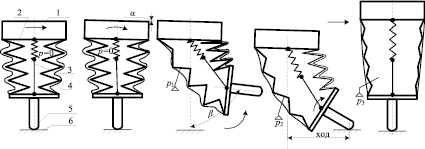
Рассмотрим полный цикл работы сильфонного кольцеобразного конусного привода бедра ноги шагающего аппарата (рис. 1), в котором в качестве энергоносителя для изгиба сильфона используется избыточное давление воздуха, а для выпрямления – давление разрежения.
В исходном положении (рис. 1, а) в камере сильфона атмосферное давление и он занимает симметричное относительно оси положение. Направление требуемого перемещения задают (рис. 1, б) наклоном корпуса в нужном направлении на угол α, изменяя геометрию камеры сильфона. Для выполнения функции подъёма ноги, криволинейного перемещения рабочего органа рабочую полость сильфона соединяют с избыточным давлением воздуха (рис. 1, в). После выполнения данной функции соединяют рабочую камеру сильфона с атмосферой (рис. 1, г). Уменьшение усилия воздействия избыточного давления приводит к частичному выпрямлению сильфона и силовому взаимодействию рабочего органа с опорной поверхностью, величина которого незначительна и определяется упругой характеристикой сильфона. Соединение рабочей камеры с пневмопитанием давления разрежения воздуха (рис. 1, д) приводит к осевому сжатию сильфона, увеличению силового воздействия на опорную поверхность и перемещению корпуса в заданном направлении.
Результаты исследования и их обсуждение
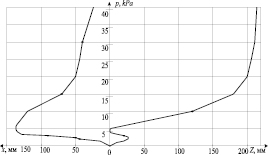
При макетировании и исследованиях применен конусный сильфон (пыльник амортизатора переднего М-2141). На рис. 2 показаны результаты натурных исследований влияния увеличения давления p воздуха в камере на положение стержня по осям горизонтальной х и вертикальной z при различных полезных нагрузках N.
Графики показывают эффективность схемного решения ограничения осевого растяжения сильфона гибкой нерастяжимой тягой для выполнения функции «подъем ноги шагающего аппарата» не только в цилиндрическом, но и в коническом сильфоне.
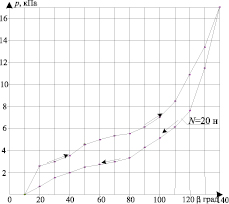
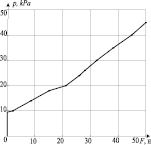
На этапах работы привода (рис. 1, в, г) одним из важных параметров криволинейного перемещения является угол поворота β рабочего органа, а на этапе выпрямления сильфона (рис. 1, д) – силовая характеристика привода (рис. 3).
Графики (рис. 3, а) показывают возможность получения большего угла поворота рабочего органа, и, кроме этого, наблюдается гистерезис зависимости угла поворота в процессе увеличения давления p в рабочей камере привода и возврата в исходное положение.
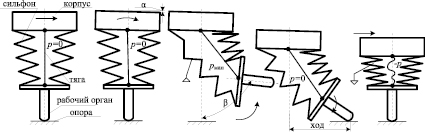
а) б) в) г) д)
Рис. 1. Схемы этапов работы привода бедра шагающего аппарата: а) исходного положения; б) задание направления перемещения; в) криволинейное перемещение подъема рабочего органа; г) опускание рабочего органа на опорную поверхность; д) перемещение корпуса аппарата
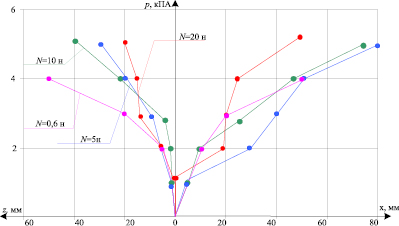
Рис. 2. Графики зависимости перемещения рабочего органа конусного привода от величины давления в рабочей камере
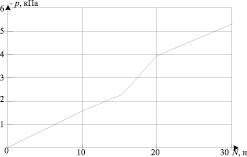
Результаты исследования этапа (рис. 1, д) перемещения корпуса аппарата выпрямлением сильфона (рис. 3, б) показывают, что силовые характеристики привода выполнения функции перемещения корпуса шагающего аппарата незначительно превышают характеристики искривления сильфона. Кроме этого, использование в качестве энергоносителя давления разрежения ограничивает возможность их существенного увеличения.
В связи с этим предложена идея использовать для выполнения функции выпрямления сильфона в качестве энергоносителя избыточное давление воздуха. Данная идея реализована в новом сильфоном приводе криволинейного перемещения (рис. 4), в котором по оси вместо нерастяжимой тяги установлена подпружиненная тяга, а по периметру закреплен ограничитель осевого перемещения, выполненный в виде нерастяжимой оболочки.
Устройство состоит из корпуса 1, на котором закреплен сильфон 2 с верхней и нижней крышками, образующими герметичную камеру, где закреплена центральная гибкая подпружиненная тяга 3, соединяющая корпус и рабочий орган 4, установленный на опорной поверхности 5. По периметру сильфона установлена нерастяжимая оболочка 6, ограничивающая осевое перемещение сильфона.

а) б)

в) г)
Рис. 3. Конусный сильфонный привод криволинейного перемещения: а) график зависимости угла поворота рабочего органа от величины избыточного давления в рабочей камере; б) график зависимости силовой характеристики привода от давления разрежения воздуха; в) и г) общий вид
а) б) в) г) д)
Рис. 4. Схемы этапов работы привода бедра шагающего аппарата с подпружиненной центральной тягой и ограничительной оболочкой: а) исходное положение; б) задание направления перемещения; в) криволинейное перемещение подъема рабочего органа; г) опускание рабочего органа на опорную поверхность; д) перемещение корпуса аппарата
Этапы исходного положения и задания направления перемещения выполняются аналогично работе сильфонного привода с центральной гибкой нерастяжимой тягой (рис. 1, а, б). На этапе криволинейного перемещения подъема рабочего органа при повышении давления воздуха в камере сильфона до p1 возникает неустойчивость его симметричного расположения, приводящая к криволинейному перемещению и его искривлению в заданном направлении (рис. 4, в). Дальнейшее повышение давления воздуха до величины p2 приводит к растяжению осевой тяги и сильфона. Натягивается оболочка, ограничивая его продольное перемещение и выпрямляя сильфон (рис. 4, г). Выполняется этап опускания рабочего органа на опорную поверхность. Повышение величины давления воздуха в рабочей камере до давления p3 приводит к дальнейшему осевому растяжению сильфона и его выпрямлению под силовым воздействием нерастяжимой оболочки. Выполняется функция перемещения корпуса аппарата (рис. 4, д).
Результаты натурных исследований показаны на рис. 5. При макетировании применена нерастяжимая оболочка из полиэстера.
Графики (рис. 5, а) показывают, что при повышении давления до 5 kPa выполняется перемещение рабочего органа на 130 мм по горизонтальной оси в направлении требуемого перемещения корпуса аппарата, а затем при увеличении давления в рабочей камере происходит выпрямление сильфона и перемещение рабочего органа в обратном направлении. Силовое взаимодействие рабочего органа с опорной поверхностью начинается при превышении давления в рабочей камере 10 kPa и достигает 50 Н, что в 1,5 раза превышает характеристику аналогичного привода.
а) б)





в) г) д) е) ж)
Рис. 5. Сильфонный привод криволинейного перемещения: а), б) графики зависимости соответственно положения рабочего органа и силовой характеристики F от величины давления в рабочей камере конусного сильфона; в – ж) общий вид приводов соответственно с конусным и цилиндрическим сильфоном
Заключение
Проведенные исследования конусных сильфонных приводов с жесткой центральной тягой по сравнению с цилиндрическими показали возможность получения большего угла поворота рабочего органа. Кроме этого, процесс поворота и возврата сильфона в исходное положение без воздействия полезной нагрузки на привод сопровождается гистерезисом зависимости угла поворота от давления.
Исследованиями полного цикла работы данных приводов установлено, что они обладают ограничениями по применению в качестве приводов ног шагающего аппарата, связанными с конструктивным исполнением, не позволяющим повысить их силовые технические характеристики. Использование вакуумного источника энергоносителя для выпрямления сильфона ограничивает тяговые усилия мобильного аппарата.
Предложен и исследован новый привод криволинейного перемещения, где по периметру сильфона дополнительно установлена нерастяжимая оболочка, ограничивающая осевое перемещение сильфона. Это позволяет для осуществления этапа выпрямления сильфона при выполнении функции перемещения корпуса шагающего аппарата использовать избыточное давление питания рабочей среды, что существенно увеличивает силовые характеристики привода при сохранении его массогабаритных параметров и упрощает систему управления приводом.
Библиографическая ссылка
Сысоев С.Н., Никифоров И.Е., Мосалев А.А. СИЛЬФОННЫЕ ПРИВОДЫ КРИВОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ НОГИ ШАГАЮЩЕГО АППАРАТА // Современные наукоемкие технологии. 2020. № 6-1. С. 98-103;URL: https://top-technologies.ru/ru/article/view?id=38076 (дата обращения: 16.07.2026).
DOI: https://doi.org/10.17513/snt.38076