



Совершенствование технологий и ус- тройств, реализующих шагающие перемещения, создаваемых с древних времен (230 г. до Р.Х. [1, с. 4]), и в настоящее время является актуальным.
По сравнению с традиционными колёсными и гусеничными машинами шагающие аппараты имеют ряд преимуществ перед традиционными транспортными средствами при движении по поверхности со сложным рельефом [2].
Для выполнения шагающего перемещения используют две взаимосвязанные части: систему управления (информационную) и силовую (энергетическую), которые постоянно совершенствуют. Применяют современные информационно-измерительные и управляющие системы [3], используют традиционные движители и разрабатывают оригинальные, например, оболочковые [4] приводные механизмы.
Одним из перспективных направлений являются современные разработки, связанные с созданием шагающего аппарата, конструктивное исполнение которого позволяет реализовывать любое требуемое направление его перемещения без поворота корпуса [5]. Это достигается тем, что бедро ноги данного аппарата выполнено по типу опрокинутой платформы Стюарта.
Однако существенное увеличение количества силовых цилиндров в системе приводов приводит к значительному усложнению управления и конструкции, а также к снижению массогабаритных характеристик устройства.
Анализ разработанных современных шагающих аппаратов (педипуляторов), предназначенных для передвижения по пересеченной местности, выявил сложное конструктивное исполнение систем приводных механизмов и их управления.
Цель исследования: повышение эффективности работы педипуляторов путем разработки методики их конструирования, позволяющей создавать новые системы приводов, как с упрощенной силовой частью, так и простым управлением, при сохранении требуемых функциональных возможностей.
Материалы и методы исследования
Объектом исследования является система приводов педипуляторов. В качестве предмета исследования принят аппарат, шагающий в любом направлении без поворота корпуса в горизонтальной плоскости.
Для реализации поставленной цели используем метод исследования функционально-физических связей (МИФФС) [6], который базируется на выявлении и использовании скрытых закономерностей работы исследуемого объекта, анализируя его потребности, функции, физические явления, происходящие в устройстве на последовательных этапах его функционирования.
Рассмотрим работу шагающего аппарата с шестью ногами, который в процессе перемещения последовательно опирается на три ноги.
На рис. 1 показаны этапы работы шагающего аппарата, реализующего перемещение в требуемом направлении без поворота его корпуса.
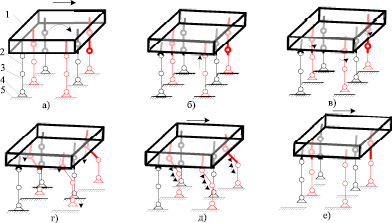
Рис. 1. Этапы работы шагающего аппарата: а), б), в), г), д), е – соответственно исходное положение; с наклоном корпуса; подъем трех ног; поворот бедер; опускание стоп на опорные поверхности; выпрямление ног
Корпус 1 (рис. 1, а) перемещается в направлении, например, вправо шестью ногами, каждая из которых выполнена в виде последовательно сочлененных посредством шарниров стержней бедра 2, голени 3 и стопы 4, взаимодействующей с опорной поверхностью 5. Перед началом движения корпус наклоняется в направлении требуемого перемещения (рис. 1, б), затем приподнимаются три ноги (рис. 1, в), устраняя силовое взаимодействие стоп с их опорными поверхностями. Поворотом бёдер двух ног в требуемом направлении перемещения корпуса (рис. 1, г) достигается перемещение их стоп в данном направлении относительно их опорных поверхностей. Перемещаются изогнутые ноги относительно корпуса в направлении опорных поверхностей (рис. 1, д), осуществляя силовой контакт стоп с ними. Выпрямляются ноги (рис. 1, е), перемещая корпус на шаг в заданном направлении.
Проведем анализ выполнения ногой шагающего аппарата функции перемещения корпуса в заданном направлении.
Исследуем процесс поднятия стопы и перемещения в требуемом направлении относительно её опорной поверхности.
Рассмотрим систему приводов (рис. 2), установленную на корпусе 1 и состоящую из приводов ноги 2, бедра 3, голени 4 и стопы 5. А – заданное направление перемещения корпуса, α – угол наклона корпуса перед началом перемещения, β – угол поворота бедра ноги.
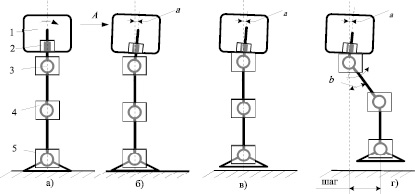
Рис. 2. Расчетная схема работы системы приводов ноги шагающего аппарата: а), б), в), г) соответственно исходное положение; с наклоном корпуса; подъем ноги; поворот бедра
Необходимо разработать систему приводов, в которой были бы организованы причинные взаимосвязи между физическими явлениями (J), реализующими требуемую последовательность функций (Ф):
Фин – Фзн – Фпн – Фпс,
Jин – Jзн – Jпн – Jпс,
где ин, зн, пн, пс – соответственно исходного состояния аппарата, задания направления перемещения, подъема ноги, перемещения стопы относительно опорной поверхности.
Данные физические явления формально описываются выражением
∀Jин $ [(α = 0) ∧ (П2 = 0) ∧ (П3 = 0) ∧ (ЭП3 =0) ∧ (П4 = 0) ∧(П5 = 0) ∧ (β = 0)],
∀Jзн $ [(α = 1) ∧ (П2 = 1) ∧ (П3 = 0) ∧ (ЭП3 =1) ∧ (П4 = 0) ∧(П5 = 0) ∧ (β = 0)],
∀Jпн $ [(α = 1) ∧ (П2 = 1) ∧ (П3 = 0) ∧ (ЭП3 =0) ∧ (П4 = 0) ∧(П5 = 0) ∧ (β = 0)], (1)
∀Jпс $ [(α = 1) ∧ (П2 = 0) ∧ (П3 = 1) ∧ (ЭП3 =1) ∧ (П4 = 0) ∧(П5 = 0) ∧ (β = 1)],
где П2, П3, П4, П5 – работа соответственно приводов перемещения ноги, бедра, голени, стопы; ЭП3 – изменение положения элементов привода бедра; 1 и 0 – соответственно наличие и отсутствие физического явления.
Анализ данного выражения показывает, что для всех ситуаций работы шагающего аппарата существуют физические явления:
– из исходного положения осуществляют наклон корпуса в сторону требуемого направления перемещения, приводящий к смещению центра его массы относительно опоры ноги;
– поворот корпуса относительно опоры ноги приводит к изменению положения элементов привода бедра ноги аппарата.
Результаты исследования и их обсуждение
Анализом физических явлений, происходящих при функционировании ноги шагающего аппарата, выявлены существенные признаки выполнения функции перемещения стопы в требуемом направлении. Предложена идея управления устройством с использованием информации о положении корпуса аппарата относительно опорной поверхности ног. Это позволяет существенно сократить количество управляемых приводов при сохранении функциональных возможностей устройства.
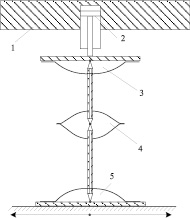
Данная идея реализована устройством (рис. 3) [7]. На корпусе 1 закреплен привод 2 перемещения ноги аппарата. Нога выполнена в виде последовательно сочлененных посредством шарниров стержней. В местах сочленения стержней установлены приводы 3, 4, 5 соответственно бедра, голени и стопы. Приводы представляют собой герметичную камеру, образованную гибкой оболочкой, выполненную с возможностью соединения с источником пневмопитания. Оболочки камер приводов бедра и стопы состоят из одной диафрагмы, а камера привода голени – из двух диафрагм. Создание в любой камере избыточного давления пневмопитания приводит к выпрямлению относительного осевого положения стержней.

а) б)
Рис. 3. Нога шагающего аппарата: а) схема; б) общий вид
Работа, например, привода 3 бедра осуществляется следующим образом. Перед началом работы наклоном корпуса задается направление поворота бедра. Перекос бедра относительно корпуса приводит к изменению геометрии камерного привода. Камеру привода соединяют с пневмолинией давления разрежения. Возникает силовое воздействие на стержень в виде крутящего момента, направленного в заданную сторону поворота бедра, которое поворачивается на угол β (рис. 2, б).
Макетирование устройства (рис. 3, б) и проведенные натурные исследования подтверждают его работоспособность и эффективность.
Предложенная новая структура ноги шагающего аппарата кроме этого позволяет расширить функциональные возможности устройств данного типа.
Например, на рис. 4 показаны варианты реализации перемещения стопы относительно опорной поверхности в направлении противоположном наклону корпуса (рис. 4, а и б) и работа системы приводов с использованием наклона опорной поверхности (рис. 4, в, г, д, е).
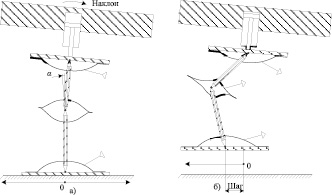
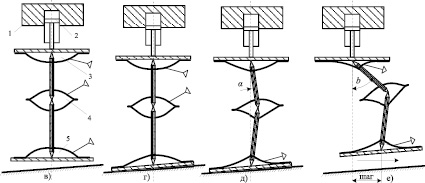
Рис. 4. Схема этапов перемещения стопы шагающего аппарата: а) и б) по горизонтальной поверхности соответственно до и после выполнения перемещения; в), г), д), е) по наклонной поверхности соответственно исходное положение ноги, в контакте с опорной поверхностью, перед перемещением и после
В исходном положении (рис. 4, в) стопа находится над опорной поверхностью, так как нога приводом 2 поднята относительно корпуса 1. Камеры 3, 4, 5 соединены с пневмопитанием избыточного давления и стержни подпружинены в среднем положении.
Соединяют полость 5 с атмосферой и перемещают приводом 2 ногу вниз (рис. 4, г).
Силовое взаимодействие опорной поверхности со стопой приводит к перекосу взаимного расположения голени и стопы.
Соединение полости 5 с пневмолинией разрежения (рис. 4, д), а затем полостей 3 и 4 с атмосферой приводит к изменению взаимного расположения стержней бедра и голени. Соединением камер 2, 3 с пневмолинией разрежения нога сгибается и перемещается стопа относительно опорной поверхности (рис. 4, е).
Заключение
Таким образом, применением методики поискового конструирования выявлен новый существенный признак выполнения функций перемещения ноги шагающего аппарата.
Предложены идея и новое устройство для ее реализации, в котором направление перемещения задается наклоном корпуса аппарата, а функционирование системы приводов камерного типа осуществляется заданием геометрии камер.
По сравнению с аналогичными устройствами существенно уменьшено количество используемых приводов. Для перемещения бедра ноги вместо шестистержневого шарнирного механизма применяется один привод.
Кроме этого, показано, что предложенная структура системы приводов расширяет функциональные возможности шагающего аппарата. Аппарат может перемещаться как в направлении наклона корпуса устройства, так и в противоположном, а также использовать наклон опорной поверхности для управления направлением его перемещения.
Библиографическая ссылка
Сысоев С.Н., Никифоров И.Е., Маскин А.С. МЕТОДИКА КОНСТРУИРОВАНИЯ СИСТЕМЫ ПРИВОДОВ НОГИ ШАГАЮЩЕГО АППАРАТА // Современные наукоемкие технологии. 2020. № 2. С. 66-71;URL: https://top-technologies.ru/ru/article/view?id=37916 (дата обращения: 04.07.2026).
DOI: https://doi.org/10.17513/snt.37916