



Все чаще в современной технической литературе встречается термин «более электрический самолет» [1–3]. Под этим термином понимают самолет, в котором одна или несколько централизованных гидросистем заменяется силовыми электрическими системами. С точки зрения исполнительной части системы управления такая тенденция приводит к необходимости разработки и внедрения новых типов рулевых приводов, способных осуществлять собственное энергопитание от силовой электросистемы самолёта, обладая при этом высокими статическими, динамическими и энергетическими характеристиками, а также потребным уровнем надежности и отказобезопасности.
Среди существующих электрогидравлических рулевых приводов, применяемых или планируемых к применению на борту «более электрического самолета», можно выделить следующие основные типы:
1. Электрогидростатические рулевые приводы (ЭГСП или Electro-Hydrostatic Actuator – EHA).
2. Электрогидравлические рулевые приводы с комбинированным регулированием скорости (ЭГРП-КРС [4, 5]).
3. Двухрежимные электрогидравлические рулевые приводы (ДГРП или Electrical-Backup Hydraulic Actuator – EBHA [6, 7])
Как показывает обзор архитектур комплексных систем управления (КСУ) современных гражданских самолётов [8], ведущими мировыми производителями авиационной техники рассматриваются варианты установки на одну рулевую поверхность управления (в том числе на основные поверхности управления) нескольких разнородных электрогидравлических рулевых приводов [9–11]. Кроме того, на существующем пассажирском самолёте Airbus A-380 приводы основных рулевых поверхностей управления разнородны как по энергопитанию, так и по способу регулирования скорости выходного звена. Так, например, секции руля направления отклоняются двухрежимными рулевыми приводами, а на рулях высоты установлены ЭГРП и ЭГСП.
Указанная выше тенденция показывает, что при реализации современных архитектур КСУ пассажирских и транспортных ЛА уже рассматривается потенциальная возможность организации совместной работы разнородных электрогидравлических рулевых приводов на единую поверхность управления. Это означает, что вопрос исследования совместной работы разнородных приводов и определения способов снижения их силового взаимонагружения разнородных приводов является актуальным и востребованным.
Цель исследования: изучение потенциальной возможности организации совместной работы разнородных электрогидравлических рулевых приводов на единую поверхность управления. В качестве объектов исследования авторами работы выбраны следующие типы приводов: двухрежимный электрогидравлический рулевой привод, как наиболее перспективный, по мнению ряда авторов [12–14], тип электрогидравлических приводов с электрическим энергопитанием, и привод с дроссельным регулированием скорости (ЭГРП), как наиболее часто применяемый тип рулевых приводов на борту существующих пилотируемых ЛА. Указанные выше приводы разнородны по типу силового энергопитания. При этом в качестве действующего образца двухрежимного привода авторами выбран «гибридный привод ПМ.00», выполненный по оригинальной конструктивной схеме.
Материалы и методы исследования
Исследование совместной работы осуществлялось методом математического моделирования: в программе MatLab Simulink. Авторами была разработана математическая модель гибридного электрогидравлического рулевого привода, общая структура которой приведена на рис. 1, и математическая модель типового электрогидравлического привода с дроссельным регулированием скорости, структура которой приведена на рис. 2.
Для подтверждения результатов, полученных с помощью математического моделирования и окончательной верификации математической модели, авторами произведен ряд экспериментальных исследований гибридного электрогидравлического рулевого привода ПМ.00 на стенде ЦАГИ.
На рис. 3 продемонстрирована испытательная установка и привод, размещенный на стенде. По результатам проведённых экспериментов были получены характеристики привода, на основании которых производилась верификация математической модели, что позволило окончательно подтвердить достоверность результатов исследования методом математического моделирования.
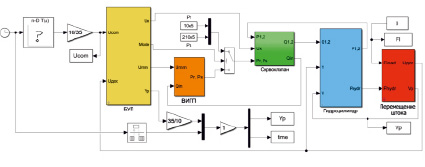
Рис.1. Структура математической модели гибридного электрогидравлического рулевого привода
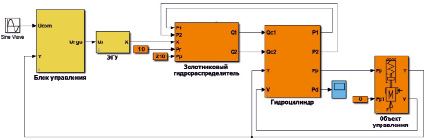
Рис. 2. Структура математической модели электрогидравлического рулевого привода с дроссельным регулированием скорости

Рис. 3. Экспериментальная установка гибридного электрогидравлического рулевого привода
При исследовании совместной работы рулевых приводов методом математического моделирования предполагалось, что исследуемые приводы будут установлены на одной рулевой поверхности управления и имеют одинаковые или близкие (не более 10 % разницы) номинальные скорости холостого хода и тормозные усилия на поршне, а также ход штока поршня. Кроме того, для достижения целей проводимого исследования авторами рассматривается худший случай работы рулевых приводов, при котором их выходные звенья жестко соединены между собой (шток в шток). При таком подключении взаимонагружение не снижается за счет конечной жесткости узлов крепления ЭГРП к рулевой поверхности и скручивания силовой балки, что позволит определить максимальную величину силового взаимонагружения и разработать наиболее эффективную систему выравнивания усилий (СВУ).
Результаты исследования и их обсуждение
В процессе перемещения штоков ЭГРП невозможно обеспечить идентичность скоростей движения, из-за чего при отработке приводами гармонического или иного закона управления без введения в контур управления СВУ на выходных звеньях приводов происходит существенное их взаимонагружение, регистрируемое датчиками перепада давления в полостях каждого гидроцилиндра. Взаимонагружение может возникать и в статическом состоянии в случае, например, смещения нулевого положения датчиков обратной связи у каждого из приводов.
Для компенсации силового взаимонагружения приводов авторами была разработана система выравнивания усилий в каждом из приводов и проведено исследование эффективности работы при организации различных схем её включения в контуры управления приводами:
– «ведомый – ведущий», где ведомым является ЭГРП, а ведущим – ДГРП. Коррекция при этом реализуется только в ЭГРП;
– «ведомый – ведущий», где ведомым является ДГРП, а ведущим – ЭГРП. Коррекция при этом реализуется только в ДГРП;
– СВУ реализуется в двух приводах.
Пример реализации СВУ в контуре управления привода с дроссельным регулированием скорости приведен на рис. 4. Стоит также отметить, что в процессе исследования предполагалось, что объектом применения рассматриваемых приводов является рулевая поверхность неманевренного самолёта, а значит, от приводов не требовались высокие динамические возможности, и контрольными частотами для гармонического управляющего сигнала являлись частоты до 3…5 Гц.
По результатам проведенных исследований было показано, что разработанная система выравнивания усилий существенно снижает силовое взаимонагружение в приводах. В качестве примера на рис. 5 показана работа рассматриваемых приводов при отработке 50 % управляющего сигнала с частотой 0,25 Гц, при этом ДГРП работает в режиме комбинированного регулирования скорости.
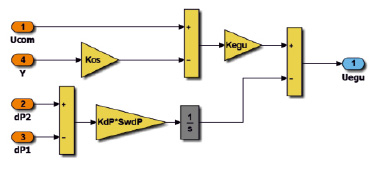
Рис. 4. Реализация системы выравнивания усилий на примере алгоритма управления ЭГРП. На рисунке введены следующие обозначения: Ucom – сигнал управления, Y – положение штока привода, dP2 – перепад давления в гидроцилиндре ЭГРП, dP1 – перепад давления в гидроцилиндре ДГРП, Kos – коэффициент обратной связи ЭГРП, Kegu – коэффициент усиления сигнала ошибки, KdP – коэффициент усиления сигнала рассогласования по давлению, SwdP – признак включения коррекции по давлению, Uegu – сигнал управления на ЭГУ привода
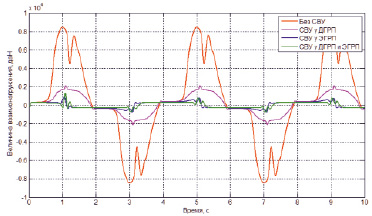
Рис. 5. Силовое взаимонагружение рассматриваемых приводов при выбранных схемах снижения силового взаимонагружения (коррекции характеристик) и отработке приводами гармонического закона управления
Стоит отметить, что отработка приводами ступенчатых входных сигналов авторами в статье не приводится ввиду ограничения на объем публикации. Тем не менее указанные выше случаи рассматривались.
Выводы
В результате проведенного исследования было установлено, что при работе разнородных электрогидравлических рулевых приводов на единую поверхность управления возникает их силовое взаимонагружение.
С целью снижения силового взаимонагружения и коррекции выходных характеристик приводов была разработана система выравнивания усилий, явившаяся частью алгоритма управления ЭГРП, и рассмотрены следующие случаи:
– реализация схемы «ведомый – ведущий», где ведомым является ЭГРП, а ведущим – ДГРП. Коррекция при этом реализуется только в ЭГРП;
– реализация схемы «ведомый – ведущий», где ведомым является ДГРП, а ведущим – ЭГРП. Коррекция при этом реализуется только в ДГРП;
– коррекция в двух приводах.
Полученные результаты показали:
– снижение силового взаимонагружения приводов возможно средствами управления без доработки конструкции приводов (предполагалось, что в конструкции уже присутствуют датчики давления в гидроцилиндре);
– при реализации схемы «ведомый – ведущий», где ведомым является ЭГРП, а ведущим – ДГРП, силовое взаимонагружение удалось снизить до 16 % от максимальной развиваемой каждым из приводов силы;
– при реализации схемы «ведомый-ведущий», где ведомым является ДГРП, а ведущим – ЭГРП, силовое взаимонагружение удалось снизить до 21 % от максимальной развиваемой каждым из приводов силы;
– при реализации коррекции сразу в двух приводах силовое взаимонагружение удалось снизить до 10 % от максимальной развиваемой каждым из приводов силы.
Сказанное выше позволяет утверждать, что рациональнее делать систему выравнивания усилий в двух приводах или, если это технически невозможно, то строить структуру по принципу «ведомый – ведущий», где ведомым является ЭГРП (ввиду его лучшей динамики), а ведущим – ДГРП, или при реализации СВУ сразу в двух приводах. Это обусловлено в том чсиле тем фактом, что реальная максимальная скорость исследуемого ЭГРП выше скорости холостого хода исследуемого ДГРП. Кроме того, быстродействие ЭГРП значительно выше.
Можно также отметить, что в проведенном исследовании не рассматривались случаи работы приводов под нагрузкой, однако, как показывает опыт авторов, силовое взаимонагружение приводов снижается при росте внешней нагрузки, воздействующей на ЭГРП через объект управления.
Библиографическая ссылка
Алексеенков А.С., Ерофеев Е.В., Найденов А.В. Исследование силового взаимонагружения разнородных электрогидравлических рулевых приводов при их совместной работе // Современные наукоемкие технологии. 2019. № 9. С. 26-30;URL: https://top-technologies.ru/ru/article/view?id=37660 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.37660