



Научно-технологическое развитие страны невозможно без создания «современной и безопасной цифровой образовательной среды, обеспечивающей высокое качество и доступность образования всех видов и уровней» [1]. Перспективным проектом для развития такой образовательной среды на данный момент является работа «кванториумов» – площадок, оснащенных высокотехнологичным оборудованием, нацеленных на подготовку новых высококвалифицированных инженерных кадров, разработку, тестирование и внедрение инновационных технологий и идей. Мысль о создании кванториумов была положительно воспринята детскими садами и школами для организации локальных «мини-кванториумов» по определенному направлению.
Основой мини-кванториумов по направлению «робототехника» могут быть робототехнические конструкторы, моделирующие применение технологии «Интернет вещей». «Интернет вещей» является перспективной концепцией в сфере hi-tech, которая подразумевает объединение физических предметов («вещей»), оснащённых встроенными технологиями в единую сеть для взаимодействия друг с другом или с внешней средой [2]. Организация таких сетей рассматривается как явление, способное перестроить экономические и общественные процессы, исключающее из части действий и операций необходимость участия человека [3].
Для знакомства детей в игровой форме с основами технологии «Интернет вещей» может быть использован робототехнический конструктор, моделирующий применение этой технологии в несложном, известном детям процессе, например работе «умной» парковки автомобилей. Термин «умный» показывает, что часть функций парковки должна быть автоматизированной для повышения удобства и надежности ее использования.
Раннее знакомство с высокотехнологичным оборудованием, изучение области его применения и принципов работы будет способствовать развитию инженерного мышления учащихся, что является актуальной образовательной задачей сегодня. Решение данной задачи требует технологического обеспечения образовательного процесса, в том числе проектирования и разработки робототехнических конструкторов для изучения разных аспектов применения технологии «Интернет вещей».
Целью исследования является описание проекта робототехнического конструктора «Умная парковка» для знакомства обучающихся с технологией «Интернет вещей».
Материалы и методы исследования
К основным методам исследования, которые применялись в работе, можно отнести изучение научно-методической и технической литературы для определения базовых используемых понятий; теоретическое проектирование и моделирование и анализ существующих аналогов конструкторов.
В данной работе под конструктором мы будем понимать набор стандартных деталей, из которых можно собрать одну или несколько моделей. Робототехнический конструктор – это конструктор с микроэлектронными программируемыми компонентами, позволяющими реализовывать элементы искусственного интеллекта, то есть автономного действия устройства в соответствии с изменяющимися условиями.
В настоящее время уже разработан ряд робототехнических конструкторов для изучения концепции «Интернет вещей». Например, конструкторы «Умный дом», «Умная юрта» «Экодом» и др. Перечисленные робототехнические конструкторы функционируют на базе платформы Arduino, которая представляет собой плату с контактами для подключения дополнительных компонентов. На базе Arduino создаются автономные и подключаемые к компьютеру проекты. Программный код записывается на саму плату, благодаря встроенному в процессор программатору.
Результаты исследования и их обсуждение
Проведенный анализ существующих аналогов подобных робототехнических конструкторов показал, что в качестве игрового поля во всех конструкторах моделируется дом. Однако обучающиеся должны знать применение технологии «Интернет вещей» и в других сферах деятельности. Поэтому проектирование и дальнейшая разработка конструктора «Умная парковка» актуальны.
Робототехнический конструктор должен удовлетворять следующим требованиям:
- мобильность (конструктор должен быть нетяжелым, детали конструктора должны легко крепиться между собой);
- надежность (детали конструктора и микроэлектронные элементы должны быть прочными);
- расширяемость (должна быть предусмотрена возможность добавления дополнительных деталей и микроэлектронных компонентов для расширения функциональных возможностей конструктора).
Для проектирования робототехнического конструктора был выбран объектно-ориентированный подход, основанный на объектной декомпозиции с описанием поведения системы в терминах взаимодействия объектов [4]. При описании системы на основе такого подхода используются предметы и понятия реального мира, имеющие отношение к разрабатываемой системе. Для наглядности используются различные диаграммы, иллюстрирующие тот или иной аспект проектируемой системы.
Функциональные требования к проектируемому конструктору представляются в виде диаграммы вариантов использования. Вариант использования представляет собой последовательность действий транзакций, выполняемых системой в ответ на событие, инициируемое некоторым внешним объектом (действующим лицом). Вариант использования описывает типичное взаимодействие между пользователем и системой и отражает представление о поведении системы с точки зрения пользователя. В простейшем случае вариант использования определяется разработчиком как функция, которую должна реализовывать проектируемая система. Действующее лицо (actor) – это роль, которую пользователь играет по отношению к системе [5].
В проектируемой системе умной паковки действующим лицом является водитель, который может инициировать ряд вариантов использования системы: посмотреть свободные места на парковке, получить карту радиомаркера (RFID), зарегистрировать автомобиль на парковке, открыть шлагбаум, заехать на парковку, встать на свободное место и снять автомобиль с учета (рис. 1).
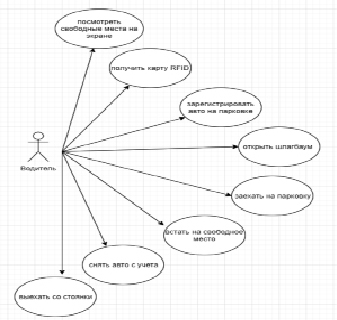
Рис. 1. Диаграмма вариантов использования
Согласно выделенным функциональным требованиям в робототехническом конструкторе можно выделить следующие подсистемы.
1. Подсистема контроля и отображения свободных парковочных мест.
2. Подсистема контроля и учета въезда автомобилей на парковку.
3. Подсистема автоматического управления освещением.
Для автоматизации работы перечисленные подсистемы должны управляться контроллером. Наиболее распространенным и подходящим для реализации выделенных нами функций конструктора является контроллер Arduino UNO R3 – представитель контроллеров компании «Arduino», созданных на микроконтроллере ATmega328 [6]. Плата имеет 14 цифровых входов/выходов, 6 из которых могут использоваться как выходы ШИМ, а также есть 6 аналоговых выходов. По сравнению с предыдущими версиями Arduino UNO R3 характеризуется более удобной маркировкой входов и выходов. Функциональность платы может быть увеличена за счет использования многочисленных расширений. Питание Arduino UNO R3 подается по USB или от внешнего источника питания, в качестве которого может использоваться аккумуляторная батарея или сетевой АС/DC-адаптер. Контроллер Arduino UNO R3 может быть присоединен к компьютеру, другой плате Arduino или к другому микроконтроллеру.
Таким образом, для функционирования робототехнического конструктора «Умная парковка» потребуются следующие микроэлектронные устройства. Для управления всеми подсистемами конструктора – контроллер Arduino Uno R3. Для реализации подсистемы контроля и отображения свободных парковочных мест – дальнометры для регистрации того, что парковочное место занято; светодиоды для индикации свободных/ занятых мест на местах парковки; жидкокристаллический экран для отображения свободных/ занятых мест. Для реализации подсистемы контроля и учета въезда автомобилей на парковку – базовая система RFID для доступа и регистрации автомобиля на парковке, семисегментный индикатор (для организации счетчика машин на парковке). Для реализации подсистемы автоматического управления освещением – световые элементы с фоторезисторами и датчиком движения.
Схема робототехнического конструктора «Умная парковка» представлена на рис. 2.
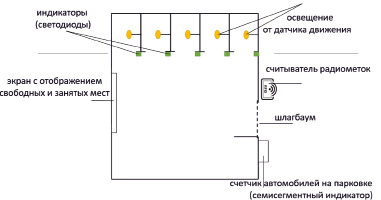
Рис. 2. Схема конструктора
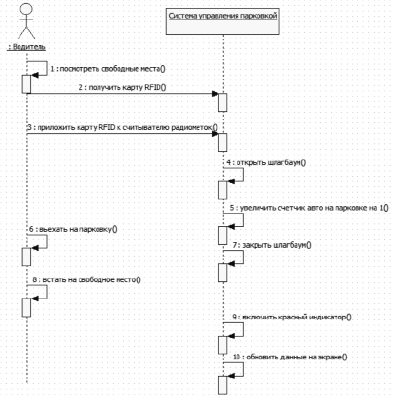
Рис. 3. Диаграмма последовательности
Для более подробного и наглядного описания работы «Умной парковки» может быть составлена диаграмма последовательности. Диаграмма последовательности – диаграмма, на которой показаны взаимодействия объектов, упорядоченные по времени их проявления [5]. В частности, на ней изображаются участвующие во взаимодействии объекты и последовательность сообщений, которыми они обмениваются. Диаграмма последовательности составляется для каждого варианта использования. Для примера приведем описание варианта использования «Заехать на парковку».
Чтобы заехать на парковку, водитель должен посмотреть наличие свободных мест на парковке. При их наличии он получает карту RFID. Эту карту он прикладывает к считывателю радиометок, после чего автоматически открывается шлагбаум и счетчик автомобилей на парковке увеличивается на единицу. Водитель въезжает на парковку (система закрывает шлагбаум) и занимает свободное место. Это регистрируется в системе – включается красный индикатор и обновляется информация на экране, отображающем свободные места.
Таким образом, с помощью построенных диаграмм мы сможем описать алгоритм функционирования «Умной парковки» и последовательность действий водителя автомобиля.
Расчет примерной стоимости оборудования для комплектации робототехнического конструктора «Умная парковка» представлен в таблице.
Расчет стоимости оборудования для создания конструктора
|
Компоненты |
Примерная стоимость, руб. |
|
Микроэлектронные компоненты |
|
|
Контроллер Arduino Uno |
520 |
|
Модуль связи ESP8266-07 WiFi |
316 |
|
Индикаторы |
532 |
|
Датчики и метки |
1303 |
|
Сервомотор |
201 |
|
Соединительные провода |
316 |
|
Элементы питания |
429 |
|
Макетные платы |
326 |
|
Компоненты игрового поля |
|
|
Расходные материалы для 3D принтера |
1409 |
|
Основание игрового поля |
219 |
|
Краска |
500 |
|
Итого |
6071 |
Заключение
«Умная парковка» – проект робототехнического конструктора для моделирования возможностей автоматизации работы парковки с использованием программируемых микроэлектронных компонентов на основе технологии «Интернет вещей». Задачи робототехнического конструктора заключаются в предоставлении следующих возможностей обучающемуся:
- знакомства с принципом автоматизации процессов с использованием программируемых контроллеров;
- знакомства с принципом получения данных о внешней среде средствами различных сенсоров;
- знакомства с принципом удаленной передачи данных;
- знакомства с концепцией «Интернет вещей».
Робототехнический конструктор «Умная парковка» может стать технологической основой проведения практических занятий или мастер-классов по робототехнике, где обучающиеся смогут самостоятельно собирать конструктор и программировать систему управления парковкой. Кроме того, с помощью 3D-ручек возможно создавать дополнительные детали (подъемные механизмы, освещение, ворота и др.) и придумывать возможности автоматизации их действия. Обучающиеся смогут узнать о микроэлектронных устройствах и их использовании на производстве, в научных исследованиях и в повседневной жизни. Они получат возможность применить знания на практике в процессе работы с робототехническими конструкторами, которые моделируют применение устройств «Интернет вещей» в реальной жизни. Совместная проектная деятельность школьников при работе с конструктором будет способствовать созданию ситуации успеха для обучающихся, развитии умений командной работы.
Библиографическая ссылка
Гребнева Д.М. ПРОЕКТИРОВАНИЕ РОБОТОТЕХНИЧЕСКОГО КОНСТРУКТОРА «УМНАЯ ПАРКОВКА» ДЛЯ ЗНАКОМСТВА ОБУЧАЮЩИХСЯ С ТЕХНОЛОГИЕЙ «ИНТЕРНЕТ ВЕЩЕЙ» // Современные наукоемкие технологии. 2018. № 9. С. 166-170;URL: https://top-technologies.ru/ru/article/view?id=37180 (дата обращения: 03.07.2026).