



Человеческий мозг получает большое количество информации при помощи различных образов, для нас нет никакой сложности в том, чтобы узнавать людей по лицам, описывать различных животных и явления. Данная задача может казаться очень легкой для человеческого мозга, но является очень сложной в реализации при помощи компьютера.
За последние несколько лет машинное обучение добилось огромного прогресса в решении данной весьма сложной проблемы. В частности, было обнаружено, что нейронная модель, называемая глубокой сверточной нейронной сетью (CNN), может достичь разумной производительности по задачам жесткого визуального распознавания изображения и их классификации [1].
Сверточные нейронные сети (CNN) представляют собой современную модельную архитектуру для задач классификации изображений. CNN применяют серию фильтров к необработанным пиксельным данным изображения для извлечения и изучения функций более высокого уровня, модель которой затем может использоваться для классификации. CNN содержит три компонента [2]:
- Сверточные слои, которые применяют к изображению определенное количество фильтров свертки. Для каждой подобласти слой выполняет набор математических операций для создания единственного значения на карте характеристик вывода. Затем сверточные слои обычно применяют функцию активации к выходу для введения нелинейности в модель.
- Объединение слоев, которые уменьшают данные изображения, извлеченные сверточными слоями, для уменьшения размерности карты признаков, чтобы уменьшить время обработки. Обычно используемым алгоритмом объединения является максимальное объединение, которое извлекает субрегионы карты функций (например, 2x2-пиксельные плитки), сохраняет их максимальное значение и отбрасывает все другие значения.
- Плотные (полностью связанные) слои, которые выполняют классификацию на свойствах, извлеченных сверточными слоями и уменьшающихся по слоям объединения. В плотном слое каждый узел в слое связан с каждым узлом предыдущего слоя.
Как правило, CNN состоит из стека сверточных модулей, которые выполняют извлечение признаков. Каждый модуль состоит из сверточного слоя, за которым следует слой объединения. За последним сверточным модулем следует один или несколько плотных слоев, которые выполняют классификацию (рис. 1). Последний плотный слой в CNN содержит единственный узел для каждого целевого класса в модели с функцией активации для создания значения между 0–1 для каждого узла. Можно интерпретировать значения функции активации для данного изображения как относительные измерения того, насколько вероятно, что изображение попадает в каждый целевой класс.
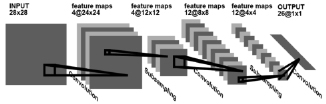
Рис. 1. Схема сверточной нейронной сети
TensorFlow, библиотека машинного обучения, разработанная компанией Google, предоставляет модуль layers, обеспечивающий высокий уровень API, который позволяет легко построить нейронную сеть. Он предоставляет методы, облегчающие создание плотных слоев и сверточных слоев, добавление функций активации и т.д. [3].
Для построения модели классификации изображений в наборе данных MNIST [4], набор данных содержащий 60 000 учебных примеров и 10 000 тестовых примеров рукописных цифр 0–9, представленные как монохромные изображения 28x28 пикселей, с использованием технологии TensorFlow, воспроизведем следующую архитектуру CNN [5]:
- Сверточный слой № 1: применяет 32 фильтра 5x5 (извлекает 5x5-пиксельные субрегионы), с функцией активации ReLU.
- Объединение слоев № 1: выполняет максимальное объединение с фильтром 2x2 и шагом 2.
- Сверточный слой № 2: применяет 64 фильтра 5x5, с функцией активации ReLU.
- Объединение слоев № 2: опять же выполняется максимальное объединение с фильтром 2x2 и шагом 2.
- Плотный слой № 1: 1024 нейронов, с коэффициентом регуляризации отсева 0,4.
- Плотный слой № 2 (Логический слой): 10 нейронов, по одному для каждого целевого класса цифр.
Для реализации данных слоев TensorFlow предоставляет следующие модули:
tf.layers – модуль содержит методы для создания каждого из трех типов слоев выше:
conv2d() – создает двумерный сверточный слой. Принимает количество фильтров, размер ядра фильтра, дополнение и функцию активации в качестве аргументов.
max_pooling2d() – создает двумерный пул, используя алгоритм максимального объединения. Принимает размер фильтра фильтрации и шагает в качестве аргументов.
dense() – создает плотный слой. Принимает количество нейронов и функцию активации в качестве аргументов.
Каждый из этих методов принимает тензор в качестве входных данных и возвращает преобразованный тензор в качестве выхода. Это упрощает подключение одного слоя к другому.
Методы в layers модуле для создания сверточных и объединенных слоев данных двумерного изображения предполагают, что входные тензоры имеют форму, определяемую следующим образом: [batch_size, image_width, image_height, channels], где
– batch_size, размер подмножества примеров для использования при выполнении градиентного спуска во время обучения;
– image_width, ширина примерных изображений;
– image_height, высота примерных изображений;
– channels, количество цветных каналов в примерах изображений. Для цветных изображений количество каналов равно 3 (красный, зеленый, синий). Для монохромных изображений имеется всего 1 канал (черный).
Набор данных MNIST состоит из монохромных изображений размером 28x28 пикселей, поэтому желаемая форма для входного слоя: [batch_size, 28, 28, 1].
Чтобы преобразовать карту функций ввода в эту форму, достаточно выполнить следующую reshape операцию:
input_layer = tf.reshape(features["x"], [–1, 28, 28, 1]).
В качестве размера пакета указывается –1, это указывает, что измерение должно динамически вычисляться на основе количества входных значений features["x"]. Это позволяет рассматривать batch_size как параметр, который можно настроить.
В первом сверточном слое нужно применить 32 фильтра 5x5 к входному слою с функцией активации ReLU. Можно использовать conv2d() метод в layers модуле для создания этого слоя:
conv1 = tf.layers.conv2d(inputs = input_layer, filters = 32, kernel_size = [5, 5], padding = «same», activation = tf.nn.relu)
Аргумент filters определяет тензор входного сигнала, который должен иметь форму [batch_size, image_width, image_height, channels]. Здесь объединяется первый сверточный слой с input_layer, который имеет вид [batch_size, 28, 28, 1].
Аргумент filters задает количество применяемых фильтров, и kernel_size определяет размеры фильтров [width, height].
Аргумент padding задает один из двух перечисленных значений valid или same. Чтобы указать, что выходной тензор должен иметь те же самые значения ширины и высоты, что и входной тензор, указывается padding = same, который сообщает TensorFlow добавлять 0 значений к краям входного тензора для сохранения ширины и высоты 28.
Аргумент activation определяет функцию активации, чтобы применить к выходу свертки. Здесь указывается активация ReLU с tf.nn.relu.
Полученный тензор conv2d() имеет вид [batch_size, 28, 28, 32], те же размеры по ширине и высоте, что и входной, но теперь с 32 каналами, содержащий выходной сигнал от каждого из фильтров.
Далее соединяются первый слой объединения со сверточным слоем, который только что был создан. Для этого можно использовать max_pooling2d() метод layers для построения слоя, который выполняет максимальное объединение с фильтром 2x2 и шагом 2:
pool1 = tf.layers.max_pooling2d(inputs = = conv1, pool_size = [2, 2], strides = 2).
Опять же в качестве аргумента inputs задается входной тензор с формой [batch_size, image_width, image_height, channels]. Здесь входной тензор – это выход из первого сверточного слоя, который имеет форму conv1[batch_size, 28, 28, 32].
Аргумент pool_size задает размер максимального объединяющего фильтра [width, height]. Если оба измерения имеют одинаковое значение, можно указать одно целое число.
Аргумент strides задает размер шага. Здесь устанавливается шаг 2, что указывает на то, что субрегионы, выделенные фильтром, должны быть разделены на 2 пикселя как по ширине, так и по высоте. Если необходимо установить разные значения шага для ширины и высоты, тогда нужно вместо этого указать кортеж или список (например, stride = [3, 6]).
Выходной тензор, создаваемый max_pooling2d(), имеет вид: [batch_size, 14, 14, 32] фильтр 2x2 уменьшает ширину и высоту на 50 %.
Можно подключить второй сверточный и объединяющий слои к CNN, используя conv2d() и max_pooling2d() как ранее. Для сверточного слоя № 2 настраивается 64 фильтра 5x5 с активацией ReLU, а для слоя объединения 2 используются те же параметры, что и для уровня объединения № 1.
Сверточный слой № 2 будет принимать выходной тензор первого объединенного слоя в качестве входного сигнала и выдает тензор в conv2 качестве выхода. conv2 имеет вид [batch_size, 14, 14, 64] и ту же ширину и высоту, что и pool1, и 64 канала для применяемых 64 фильтров.
Слой объединения № 2 берет conv2 в качестве входных данных, создавая pool2 как выход. pool2 имеет форму [batch_size, 7, 7, 64].
После нужно добавить плотный слой в CNN для выполнения классификации по свойствам, выделенным слоями свертки/объединения. Однако, перед тем как подключить слой, сначала нужно привести карту свойств к виду [batch_size, features], чтобы тензор имел только два измерения:
pool2_flat = tf.reshape(pool2, [–1, 7 * 7 * 64]).
В reshape() функции «–1» означает, что размеры batch_size будут динамически вычисляться на основе количества примеров входных данных. Каждый пример имеет 7 (ширина pool2) * 7 (высота pool2) * 64 (каналы pool2), поэтому, чтобы features размер имел значение 7 * 7 * 64 (всего 3136). Выходной тензор pool2_flat, будет иметь форму [batch_size, 3136].
Теперь можно использовать метод dense() для соединения плотного слоя:
dense = tf.layers.dense(inputs = pool2_flat, units = 1024, activation = tf.nn.relu).
Аргумент inputs определяет тензор входа: сглаженную карту функции, pool2_flat. Аргумент units указывает количество нейронов в плотном слое. Аргумент activation принимает функцию активации; можно снова использовать tf.nn.relu для добавления активации ReLU.
Чтобы улучшить результаты модели, можно также воспользоваться нормализацией выпадения плотного слоя, используя dropout метод в layers:
dropout = tf.layers.dropout(inputs = = dense, rate = 0.4, training = mode = = tf.estimator.ModeKeys.TRAIN).
Опять же inputs определяет входной тензор, являющийся выходным тензором из плотного слоя.
Аргумент rate определяет отсев; здесь используется 0,4, что означает, что 40 % элементов будут случайно выпадать во время обучения.
Аргумент training принимает логическое значение, определяющее, работает ли модель в настоящее время в режиме обучения; выпадение будет выполняться только, если training равен True. Здесь проверяется, является ли переданная функция mode модели cnn_model_fn в TRAIN режиме.
Итоговый тензор dropout имеет форму [batch_size, 1024].
Последний слой в данной нейронной сети – это логический уровень, который возвращает исходные значения для прогнозов. Создается плотный слой с 10 нейронами (по одному для каждого целевого класса 0–9) с линейной активацией:
logits = tf.layers.dense(inputs = = dropout, units = 10).
Конечный выходной тензор CNN logits имеет форму [batch_size, 10].
Логический уровень модели возвращает прогнозы как необработанные значения в [batch_size, 10]-мерном тензоре
Для обучения и оценки необходимо определить функцию потерь, которая измеряет, насколько точно предсказания модели соответствуют целевым классам. Для задач многоклассовой классификации, таких как MNIST, кросс-энтропия обычно используется как метрика потерь:
onehot_labels = tf.one_hot(indices = tf.cast(labels, tf.int32), depth = 10)
loss = tf.losses.softmax_cross_entropy(onehot_labels = onehot_labels, logits = logits)
Затем создается оценщик Estimator для модели:
mnist_classifier = tf.estimator.Estimator(
model_fn = cnn_model_fn, model_dir = "/tmp/mnist_convnet_model")
Аргумент model_fn определяет функцию модели, использующую для обучения, оценки и прогнозирования; передается модель cnn_model_fn, которая была создана ранее. Аргумент model_dir указывает каталог, в котором будет сохранена модель данных.
Обучить модель можно путем создания train_input_fn вызова train() на mnist_classifier:
train_input_fn = tf.estimator.inputs.numpy_input_fn(x = {"x": train_data}, y = train_labels, batch_size = 100, num_epochs = None, shuffle = True)
mnist_classifier.train(input_fn = train_input_fn, steps = 20000, hooks = [logging_hook])
В numpy_input_fn вызове передаются данные и метки функций обучения x и y соответственно. batch_size указывается 100, что означает, что модель будет обучаться на minibatches из 100 примеров на каждом шаге. num_epochs = None означает, что модель будет тренироваться до тех пор, пока не будет достигнуто указанное количество шагов. В train вызове устанавливается steps = 20000, что означает, что модель будет тренироваться на 20 000 шагов.
По завершении обучения можно оценить модель, чтобы определить ее точность в тестовом наборе MNIST. Для этого вызывается evaluate метод, который оценивает показатели, указанные в eval_metric_ops аргументе в аргументе model_fn:
eval_input_fn = tf.estimator.inputs.numpy_input_fn(x = {"x": eval_data}, y = eval_labels, num_epochs = 1, shuffle = False)
eval_results = mnist_classifier.evaluate(input_fn = eval_input_fn)
print(eval_results)
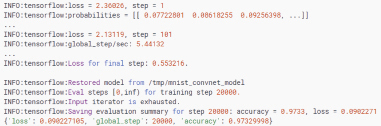
Рис. 2. Вывод содержания журнала обучения
Для создания eval_input_fn устанавливается num_epochs = 1 так, чтобы модель оценивала метрику за одно поколение данных и возвращала результат. Также устанавливается shuffle = False последовательно итерацию данных.
Полученную функцию модели CNN Estimator и логику обучения/оценки можно проверить в действии.
По мере создания модели будет виден вывод журнала, который выглядит так, как представлено на рис. 2.
Данная модель достигает точности 97,3 % в данном тестовом наборе данных.
Библиографическая ссылка
Маркин Е.И., Подопригора И.А., Бершадская Е.Г. РАЗРАБОТКА СВЕРТОЧНОЙ НЕЙРОННОЙ СЕТИ ДЛЯ РАСПОЗНАВАНИЯ РУКОПИСНЫХ СИМВОЛОВ // Современные наукоемкие технологии. 2018. № 5. С. 103-107;URL: https://top-technologies.ru/ru/article/view?id=36999 (дата обращения: 03.07.2026).