



Постоянное повышение уровня безопасности полетов лежит в основе развития воздушного транспорта. Вопрос безопасности является важнейшей составляющей систем организации воздушного движения [1, 2, 5].
Первичные данные о движении воздушных судов традиционно предоставляются наземными радарными системами; как правило, такие системы позволяют с достаточной точностью определить координаты и скорость движения воздушного судна, однако дистанция их действия ограничена. Системы автоматического зависимого наблюдения в режиме радиовещания (ADS-B) [8, 11–13] и система мультилатерации (MLAT) представляют собой альтернативные системы наблюдения за воздушным трафиком. Их привлекательность обусловлена в том числе сравнительно низкими затратами на установку и обслуживание оборудования. Ожидается, что системы ADS-B и MLAT будут все шире использоваться в тех районах, где использование радарных систем экономически нецелесообразно.
Организация воздушного движения связана с решением целого ряда специфических навигационных задач, в том числе – с целью предотвращения опасных ситуаций (чрезмерное сближение, уход с эшелона и т.д.). Эти навигационные задачи описываются математическими моделями и алгоритмами, требующими верификации на предмет их пригодности для использования в реальных системах управления движением воздушных судов. Подготовка данных для экспериментов, связанных такой верификацией, предполагает формирование модельных траекторий движения воздушного судна, максимально приближенных к реальным. Один из путей, позволяющих получить доступ к таким данным, – использование открытых интернет-источников данных о движении воздушных судов, которые, в свою очередь, используют системы автоматического зависимого наблюдения за движением воздушных судов. Уже сейчас в широком доступе в глобальной сети Интернет доступен целый ряд сервисов, предоставляющих данные как морского, так и воздушного трафика [3], например flightradar24.com, marinetraffic.com и др.
Некоторые вопросы исследования массивов данных о движении морских и воздушных судов уже рассматривались авторами ранее [3, 4, 6, 7]. Так, были предложены разные модели обработки и хранения данных о движении, изучались вопросы структуры и частоты обновления данных о движении морских и воздушных судов, предоставляемых системами с открытым доступом, анализировались возможности по интерполяции данных для решения различных прикладных задач обеспечения безопасности движения.
Настоящая статья посвящена задаче детектирования аномалий (выбросов) в данных о движении воздушных судов посредством применения статистических методов Data Maining. Работа ориентирована на расширение функций существующих систем управления воздушным движением.
Сбор, структура и характеристики данных о движении воздушных судов
Упомянутые интернет-сервисы имеют API-интерфейс, позволяющий обрабатывать данные протокола HTTP. В систему подаётся GET запрос в соответствующем API формате поставщика данных и принимается ответ в формате JSON. Получаемые таким образом данные представляют собой запись следующего вида:
{…
«90103962»:»co1»:»KAL»,»co2»:»KE»,»dst1»:»RJGG»,»dst2»:»NGO»,»fal»:34500,»far»:»HL7783»,»farnd»:»,»fat»:»B77W»,»fch»:1479465000637,»fgs»:450,»fhd»:28,»fid»:90103962,»fn1»:»KAL751»,»fn2»:»KE751»,»falm»:0,»fgskmh»:17.594,»fgsnah»:8.255272,»fsr»:»ADSB»,»fvr»:»»,»lat»:37.460003,»lng»:126.451515,»org1»:»RKSI»,»org2»:»ICN»,»std»:»PGANRB300711»
…}
В данном случае запись представляет собой строку символов, содержащих информацию о наблюдаемом воздушном судне. Сопоставляя информацию, отображаемую на сайте, определяется формат полученных данных: dst1 – код аэропорта вылета, dst2 – код аэропорта назначения, fal – высота полета ВС, far – регистрационный номер, fat – модель ВС, fch – временная метка (UNIX-время), fgs – скорость движения ВС, fhd – истинный курс ВС, lng – долгота, lat – широта.
В рассматриваемых данных о движении воздушных судов можно выделить статическую и динамическую часть. Статические данные содержат информацию о регистрационных параметрах и маршруте движения воздушного судна, а динамические данные отражают координаты и физические параметры движения. Запрос полетных данных осуществляется периодически. Объем получаемых и обрабатываемых при этом данных о движении зависит от наблюдаемого региона, периода опроса и длительности сбора полетных данных; он может достигать нескольких сотен записей в минуту. Обработка и хранение данных в этом случае с использованием традиционной реляционной модели бывает затруднена вследствие повышенных требований к производительности соответствующего оборудования, что является побудительным мотивом обращения к СУБД не реляционного типа [14].
Как показали проведённые наблюдения, данные о движении самолётов, поступающие из доступных интернет-источников, нередко содержат некорректную информацию. Это требует их предварительной обработки, идентификации и удаления некорректных записей. Для решения этой задачи оказался продуктивным подход, связанный с разбиением траектории движения на отдельные участки полёта, идентификации их кластерами в фазовом пространстве данных о движении и поиском аномалий.
Постановка задачи
Опишем рассматриваемое множество полетных данных о движении воздушного судна в пространстве и введём обозначения. Будем рассматривать следующие параметры траектории: высота полета над уровнем моря h, горизонтальная скорость полета vxy, вертикальная скорость полёта vh. Таким образом, будем иметь множество полётных данных X = {h(ti), vxy(ti), vh(ti)}.
Исходя из специфики проблемной области и исходных данных введём следующие предположения:
1. Каждый полет состоит из набора последовательных участков – фаз полета, в которых параметры движения близки друг к другу. Это соответствует понятию «кластер» в фазовом пространстве переменных h, vxy, vh.
2. Каждый выделенный кластер может быть разбит на более мелкие участки – сегменты фазы полёта.
3. Могут иметь место выбросы – аномальные значения данных, которые в значительной степени отличаются от значений параметров выбранной фазы полёта.
В работе ставится задача синтеза подходящего алгоритма идентификации характерных фаз полёта (кластеров) и детектирования выбросов. Выбросы считаются некорректной информацией о движении воздушного судна.
Метод решения задачи выявления некорректной информации
Описываемый далее метод обнаружения выбросов данных о движении основан на анализе траектории движения воздушного судна. Алгоритм состоит из следующей последовательности этапов:
1. Выделение фаз полета.
2. Кластеризация фаз.
3. Анализ выбросов.
Выделение и кластеризация фаз полёта. На этом этапе траектория движения воздушного судна разбивается на участки, каждый из них несет определенный физический смысл. Как правило, выделяют следующие фазы полета [5, 10]:
– стоянка;
– буксировка;
– руление до места старта;
– взлет;
– набор круизной высоты;
– круиз;
– снижение;
– маневрирование;
– приближение;
– посадка;
– руление до места стоянки.
Фазы можно выделить, используя кластеризацию траектории движения воздушного судна методами общего назначения, в которых расстояние между объектами принимается евклидовым, а расстояние между кластерами – расстоянием Уорда [9]. Основное ограничение, накладываемое на процесс кластеризации в рассматриваемой задаче, состоит в том, что объединяться в кластеры могут только соседние по времени данные.
Исследовались различные варианты кластеризации данных траектории движения воздушного судна.
- По трём параметрам (h, vxy, vh).
- По двум параметрам (h, vxy), (h, vh) или (vxy, vh).
- По одному из параметров h, vxy или vh.
- По одному параметру – суперпозиции (взвешенная сумма высоты и горизонтальной скорости, высоты и вертикальной скорости, горизонтальной и вертикальной скорости, произведение высоты и горизонтальной скорости и др.)
Наиболее устойчивые результаты дала кластеризация по одному параметру – суперпозиции высоты и горизонтальной скорости. При этом рассматривались разные варианты суперпозиции: взвешенная сумма ahh + avvxy и произведение параметров h?vxy. Окончательный выбор был остановлен на произведении в силу отсутствия необходимости обоснования выбора весовых коэффициентов.
Анализируя результаты эксперимента на реальных данных, можно отметить, что проведенная кластеризация полного маршрута движения воздушного судна достаточно точно соотносится с фактической градацией фаз движения воздушного судна. На рис. 1 показаны относительные значения параметра кластеризации на протяжении траектории полёта (по оси абсцисс отложено приведённое время движения) и центры найденных кластеров. В данном случае было выделено 13 кластеров, соответствующих основным фазам движения воздушного судна (таблица).
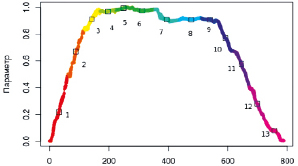
Рис. 1. Выделенные кластеры параметров траектории движения
Выделенные кластеры и фазы движения воздушного судна
|
Номер кластера |
Фаза движения |
|
1 |
Буксировка, руление до места старта, взлёт |
|
2, 3 |
Набор круизной высоты |
|
4, 6, 9 |
Круиз |
|
10, 11, 12 |
Снижение |
|
13 |
Посадка |
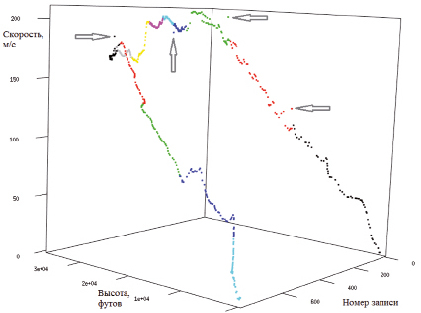
Рис. 2. Пример траектории движения воздушного судна с выделенными некорректными данными
Анализ выбросов. Используя полученные данные на предыдущем этапе о кластерах и фазах движения воздушного судна, примем известную кусочно-линейную регрессионную модель [9] данных о движении для каждого кластера. Будем считать выбросами такие значения параметров, которые не входят в границы доверительного интервала с вероятностью 95 %, имея в виду функционал метода наименьших квадратов.
На рис. 2 показан пример решения задачи детектирования выбросов, которые считаются некорректными данными. В данном случае по координатным осям отложены данные, по суперпозиции (произведению h×vxy) которых выполняется кластеризация: высота полёта и скорость движения, а также номер записи (приведённое время полёта). Различным цветом показаны данные различных фаз полёта. Стрелками показаны точки, оцененные как некорректные данные – случайные выбросы (видно, что они лежат далеко от фазовой траектории), видно, что они явно выделяются на фоне валидных данных.
Рис. 3 представляет собой увеличенную копию части рис. 2, на которой показан только участок траектории взлёта и набора высоты воздушного судна.
Как видно из рис. 2 и 3, описанный подход вполне позволяет идентифицировать некорректные данные о траектории движения самолёта, обусловленные сбоями работы навигационного оборудования и специализированных веб-ресурсов.
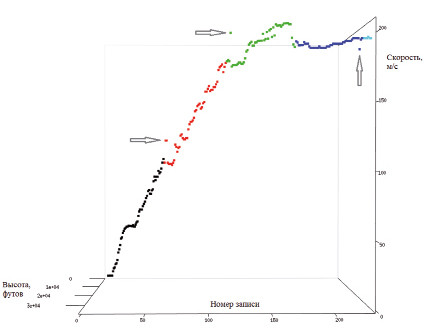
Рис. 3. Пример траектории движения воздушного судна – участок взлёта и набора высоты
Заключение
Реальные данные о трафике воздушных судов представляют собой исключительную ценность для моделирования и исследования задач в области управления воздушным движением и обеспечения безопасности полётов. Они требуются для оценки работоспособности, свойств и ограничений создаваемых моделей и алгоритмов в условиях реального воздушного трафика. Для сбора и анализа таких данных авторами была разработана информационная система, позволяющая собирать и хранить информацию о движении воздушных судов по всему земному шару в зонах доступа базовых станций ADS-B. При этом была выявлена проблема достоверности предоставляемых системой данных: они нередко содержат некорректную информацию. В настоящей работе предлагается подход к выделению (идентификации) таких некорректных данных, который характеризуется следующими аспектами:
- Данные о траектории движения воздушного судна запрашиваются на открытых интернет-сайтах, затем загружаются, парсируются и хранятся в базе нереляционного типа.
- Полученные данные обрабатываются алгоритмом кластеризации общего назначения, в котором параметром кластеризации выступает произведение высоты и горизонтальной скорости движения воздушного судна; при этом объединяться в кластеры могут только соседние по времени данные.
- Внутри каждого кластера – фазы движения воздушного судна – реализуется кусочно-линейная регрессионная модель данных, в которой доверительный интервал определяется пороговым уровнем вероятности 95 %. Данные, лежащие вне доверительного интервала, считаются ошибочными.
Указанные положения определяют научную новизну настоящей работы.
Предложенный способ идентификации некорректных данных в массивах информации о движении воздушных судов, загружаемых из доступных интернет-источников, был реализован и апробирован в реально действующей информационной системе и подтвердил свою реализуемость и эффективность. Получаемые указанной системой данные используются для верификации разрабатываемых новых методов, моделей и алгоритмов обеспечения безопасности воздушного движения.
Библиографическая ссылка
Гриняк В.М., Сапунов В.А., Гусев Е.Г. ОБНАРУЖЕНИЕ СТАТИСТИЧЕСКИХ АНОМАЛИЙ В ДАННЫХ СИСТЕМ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ // Современные наукоемкие технологии. 2017. № 6. С. 29-34;URL: https://top-technologies.ru/ru/article/view?id=36693 (дата обращения: 05.06.2026).