



С применением современных средств обеспечивается необходимый уровень регулирования и поддержки оптимальных значений параметров при работе электрооборудования. Одним из востребованных шагов на пути совершенствования средств является применение современных персональных компьютеров и соответствующего программного обеспечения. В связи с этим разработка и исследование в области интеллектуальных систем является перспективной задачей для нефтяной промышленности и топливно-энергетического комплекса в целом [8–10].
Объектом совершенствования системы автоматического управления турбогенератора в данной работе является цифровой регулятор напряжения.
Регулятор напряжения настраивает возбуждение генератора под преобладающие условия и уставные значения. От системы управления турбины к регулятору напряжения предусмотрен интерфейс.
Регулятор напряжения работает через этот интерфейс от операторской станции системы управления турбины. Можно менять уставные значения и заранее выбирать различные режимы работы [7].
Контроль над всеми основными узлами и системами турбогенератора осуществляется с помощью преобразователей, подключенных к установке централизованного контроля. Для контроля параметров системы охлаждения (давления, расходов дистиллята, охлаждающей воды, давления масла в уплотнениях вала) и параметров системы возбуждения предусмотрена контрольно-измерительная аппаратура, позволяющая беспрерывно автоматически или визуально контролировать необходимые величины, фиксировать отклонения от заданных значений и предупреждать о них [2].
В результате исследований была разработана каскадная система регулирования выходного напряжения с турбогенератора путем изменения значений тока возбуждения с помощью регулятора, реализованного на базе нечеткой логики.
Произведен выбор необходимых регуляторов для каскадной системы, расчет оптимальных коэффициентов, а также создана модель регулятора на базе нечеткой логики в математическом комплексе Matlab [6].
Зависимость тока возбуждения Iв от тока нагрузки Iа показывает, каким должен быть ток возбуждения генератора, чтобы поддерживать его напряжение постоянным при изменении тока нагрузки. Как видно, с возрастанием нагрузки при φ > 0 следует повышать ток возбуждения, а при φ < 0 – снижать его. Чем больше угол φ по абсолютной величине, тем в большей степени необходимо изменять ток возбуждения.
Построение переходного процесса основной контролируемого параметра у(t) в каскадной системе при поступлении на вход единичного ступенчатого задающего воздействия произведем в дополнительном пакете Simulink комплекса Matlab.
Основная функция нечёткого регулятора – вырабатывание выходного значения управления по текущим координатам системы.
Процедуру обработки входных данных в регуляторе можно описать следующим образом [4]:
– текущие значения входных характеристик преобразуются в лингвистические (фаззификация);
– после получения лингвистических значений и с помощью базы правил контроллера производится нечёткий логический вывод, результатом которого являются лингвистические значения выходных переменных;
– расчёт «чётких» значений управляющих параметров (дефаззификация).
Для разработки базы знаний нечёткого контроллера необходимо решить следующие задачи:
– выбрать входные лингвистические переменные, основываясь на анализе поведения замкнутой системы регулирования в нужном режиме [5];
– назначить для каждой переменной набор лингвистических значений (термов);
– выбрать для каждого из термов аппроксимирующего нечёткого множества.
Для решения поставленной задачи необходим нечёткий регулятор с тремя входами и одним выходом. Нечеткая система осуществлена по типу Мамдани с тремя входными параметрами.
В появившемся окне FISEdition установим количество входных и выходных параметров, диапазоны работы каждого параметра вручную (рис. 1–3).
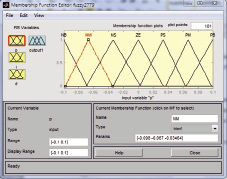
Рис. 1. Термы входных данных пропорциональной части нечеткого регулятора
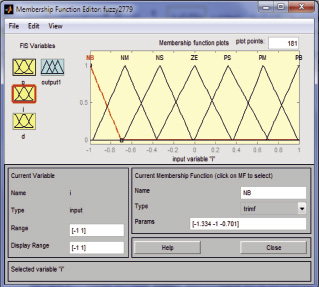
Рис. 2. Термы входных данных интегральной части нечеткого регулятора
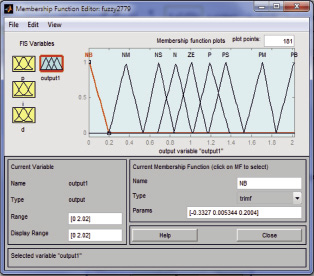
Рис. 3. Термы входных данных дифференциальной части нечеткого регулятора
Для лингвистического описания каждой входной переменной выбраны семь треугольных термов (NB, NM, NS, ZE, PS, PM, PB) и симметричные диапазоны изменения [4].
С целью осуществления данного алгоритма управления была создана универсальная программа выработки согласно заданным значениям матрицы базы знаний для нечёткого регулятора. Работа этой программы заключается в следующем:
– вызывается сохраненная матрица элементов;
– определяются наибольшие по модулю значения каждого из входов и выходов;
– диапазон значений (от –max до +max) каждого входа и выхода разбивается на термы с шагом, который задает пользователь;
– согласно принадлежности значений переменных (из полученной матрицы) на каждом шаге к тому или иному терму сформировываются правила «вход – выход»;
– правила объединяются, если при изменении входов выход не меняет своих значений;
– также объединяются одинаковые правила;
– после выполнения данного алгоритма формируется база правил нечёткого регулятора.
Правила вырабатываются по типу «Если …и …, то…».
Построили переходные процессы замкнутой системы и произвели анализ двух регуляторов в дополнительном пакете Simulink (рис. 4, 5).
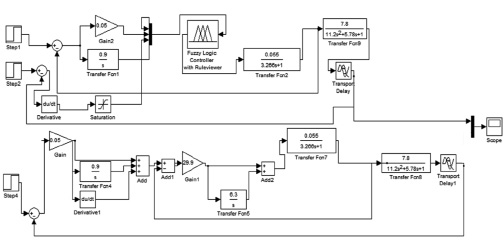
Рис. 4. Реализация каскадной системы в Simulink
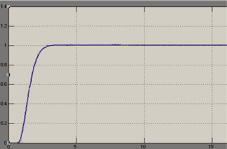
Рис. 5. Переходной процесс с использованием регулятора на базе нечеткой логики
Для загрузки базы знаний, которые необходимы для работы нечеткого регулятора, применили команду fuzzy2=readfis(‘fuzzy2777’). Также построили переходные процессы замкнутой системы и произвели анализ двух регуляторов в дополнительном пакете Simulink (рис. 4) [1].
По итогам моделирования можно сделать вывод, что при заданных параметрах объекта регулирования системы с нечёткими регуляторами, выполненными согласно характеристикам существующих систем, имеют более высокие динамические показатели относительно классической системы (рис. 5) [3, 11].
Из рис. 5 следует, что выход объекта управления системы с нечётким регулятором (c построенной автоматически базой правил) обладает наименьшим перерегулированием, наиболее эффективен по быстродействию и почти не имеет колебаний.
Выводы
В данной работе была продемонстрирована возможность автоматизированного построения базы знаний для нечёткого логического регулятора. Программный метод построения базы знаний нечёткого регулятора позволил получить качественный переходный процесс для существующей системы нечеткого регулятора при регулировании напряжения на выходе с турбогенератора, путем изменения тока возбуждения, а также повысить безопасность при эксплуатации электрооборудования на тепловой электростанции.
Высокая производительность системы позволяет реагировать на любые изменения входных параметров и принимает необходимые решения для предотвращения различных проблем на установке за короткий промежуток времени.
Библиографическая ссылка
Бикметов А.Г., Хафизов А.М., Вахитова А.Р., Сиротина Е.В., Палаева Л.В., Гилязетдинова А.М. МОДЕЛИРОВАНИЕ РЕГУЛЯТОРА НА БАЗЕ НЕЧЕТКОЙ ЛОГИКИ ДЛЯ УПРАВЛЕНИЯ ТУРБОГЕНЕРАТОРОМ // Современные наукоемкие технологии. 2017. № 4. С. 23-27;URL: https://top-technologies.ru/ru/article/view?id=36633 (дата обращения: 03.07.2026).