



Процесс перенесения валочно-трелевочной машиной дерева поворотом манипулятора в горизонтальной плоскости сопровождается значительным динамическим нагружением. Расчётная схема для исследования данного режима приведена на рис. 1. Она представляет собой крутильную динамическую систему (двигатель машины с помощью гидросистемы приводит в движение исполнительный орган – манипулятор).
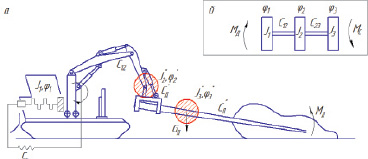
Рис. 1. Расчётная схема: а – исходная; б – эквивалентная
Принятые обозначения:
J1 – момент инерции кривошипно-шатунного механизма, маховика, сцепления и шестерён гидронасоса;
J2 – момент инерции манипулятора, захватного устройства, приведённый к коленчатому валу;
J3 – момент инерции предмета труда – дерева, приведённый к коленчатому валу;
φ1, φ2, φ3 – угловые перемещения масс соответственно с моментом инерции J1, J2, J3;
Сr – приведённая жесткость гидропередачи привода колонны манипулятора;
С12 – приведённая к коленчатому валу крутильная жесткость коленчатого вала, металлоконструкции манипулятора и гидропередачи;
С23 – приведённая крутильная жесткость дерева;

 – соответственно изгибные жесткости комлевой и вершинной части дерева;
– соответственно изгибные жесткости комлевой и вершинной части дерева;
MД – крутильный момент, отбираемый от двигателя для привода гидронасоса;
MС – приведённый момент сопротивления поворота дерева;
fп – площадь поршня (поршней) привода колонны;
r – плечо усилия на штоках гидроцилиндров гидропривода колонны.
Допущения:
1) физико-механические свойства упругих связей постоянны;
2) движения масс системы описываются линейными дифференциальными уравнениями.
Кинетическая энергия системы:

где 


Потенциальная энергия системы:

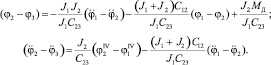
Тогда система дифференциальных уравнений примет вид

 (1)
(1)

Домножим уравнение (1) системы (1) на J2, а уравнение (2) на J1, уравнение (2) на J3, а уравнение на J3 и вычитаем из первого второе, то есть
 (2)
(2)
К полученному уравнению применяем уравнения (1), (3) системы (1):

 (3)
(3)

Домножим уравнение (2) системы (1) на J3, а уравнение (3) на J2, и вычитаем из второго третье:

 (4)
(4)



Из уравнения (3) выведем (φ2 – φ3) и  :
:
Значения для (φ2 – φ3) и  подставим в уравнение (4) и, преобразуя окончательно, получим
подставим в уравнение (4) и, преобразуя окончательно, получим


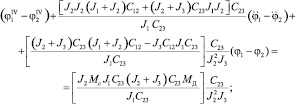
 (5)
(5)
где


Введя новую переменную  , получим однородное уравнение
, получим однородное уравнение
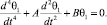 (6)
(6)
Его характеристическое уравнение имеет вид
 (7)
(7)
Решение однородного уравнения (5) будет

где
 (8)
(8)
Пример.
Исходные данные примем применительно к ВТМ ЛП-17А [2, 5]:
J1 = 4,05 кг?м2; v = 1 м/с;






Примем объем пакетируемого дерева V = 2,0 м3: СД = 19651 Н; h = 12 м.
Тогда



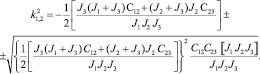
1. Определяем коэффициенты дифференциального уравнения (6):
A = 694,061 c–2; B = 2811,27 c–4.
2. Находим частоты колебаний масс:

k1 = 26,27 c–1; k2 = 2,02 c–1.
3. Начальными условиями для режима разгона будут:




Примем
 tp = 0,6 c.
tp = 0,6 c.
4. Используя начальные условия, определяем постоянное интегрирование
С1…С2; С1 = С2 = 0; 

5. Колебательная нагрузка в упругой связи С12 определяется как

или

6. При постоянных условиях получим максимальные условия  (рис. 2):
(рис. 2):



7. Снижение частоты вращения коленчатого вала произойдёт на величину:

где NH – мощность отбирается от силовой установки на привод гидронасоса:

Суммарный момент, испытываемый силовой установкой вследствие динамического нагружения, будет

где


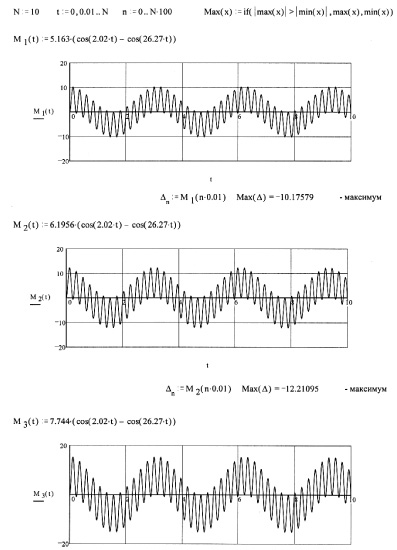
Рис. 2. Графики динамического воздействия на силовую установку ВТМ
Суммарный момент испытываемой силовой установки с учетом динамического нагружения будет

В таблице приведены результаты вычислений по снижению частоты вращения коленчатого вала при начальных условиях.
Характеристики динамического воздействия на силовую установку ВТМ в режиме перенесения дерева поворотом манипулятора в горизонтальной плоскости
|
Характеристики |
|
||
|
104,66 |
125,6 |
157,0 |
|
|
|
10,176 |
12,211 |
15,263 |
|
n′, об/мин |
210,43 |
245,44 |
294,64 |
|
KД |
1,163 |
1,195 |
1,244 |
 рад/с
рад/с Н?м
Н?мАнализ результатов показывает, что нагруженность силовой установки ВТМ в процессе перенесения дерева поворотом манипулятора сопровождается значительным динамическим нагружением, приводит к предельно допускаемому для дизелей снижению частоты вращения коленчатого вала.
Выводы
1. В целях ограничения нагруженности силовой установки ВТМ перенесение дерева поворотом манипулятора необходимо осуществлять на малых скоростях, не превышающих 0,2…0,4 м/с  .
.
2. Предложенная математическая модель позволяет определить нагруженность силовых установок валочно-трелёвочных машин в режимах перенесения дерева в горизонтальной плоскости поворотом манипулятора на стадии разработки конструкторской документации.
Библиографическая ссылка
Шоль Н.Р., Александров В.А., Шакирзянов Д.И., Будевич Е.А. НАГРУЖЕННОСТЬ СИЛОВОЙ УСТАНОВКИ ВАЛОЧНО-ТРЕЛЁВОЧНОЙ МАШИНЫ ПРИ ПЕРЕНЕСЕНИИ ДЕРЕВА ПОВОРОТОМ МАНИПУЛЯТОРА В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ // Современные наукоемкие технологии. 2016. № 4-2. С. 290-295;URL: https://top-technologies.ru/ru/article/view?id=35820 (дата обращения: 30.06.2026).