



Автоматизация с каждым днём приобретает всё большую роль в производственной деятельности, а также в повседневной жизни человеческого общества, в удовлетворении его растущих потребностей. В последние годы в связи с заметным уменьшением природных ресурсов, тревожными глобальными изменениями климата и ростом численности населения Земли роль автоматизации стремительно возрастает, а сферы её применения непрерывно расширяются.
В настоящее время принимаются попытки по созданию устройств для повышения комфорта людей во время сна и отдыха, оказания массажного и лечебно-оздоровительного воздействия на их тело. Это касается как специализированных медицинских устройств, так и обычных матрасов.
Анализ существующих устройств показывает, что все матрасы можно разделить на две группы: пружинные и беспружинные. Бывают также надувные, водяные и другие матрасы, однако они не получили широкого распространения, так как слишком сложны в эксплуатации или неудобны и малоэффективны.
Обычные матрасы неэффективны в медицинских учреждениях, особенно для лежачих больных, при послеоперационном восстановлении и т.д. [4–6].
Существующие специализированные устройства в этой области обладают рядом недостатков: низкое быстродействие, отсутствие возможности контроля температуры поверхности, невысокая адаптация поверхности матраса под лежащего человека, отсутствие возможности сбора информации о поведении человека во время сна.
Поэтому целью исследования является повышение эффективности массажного воздействия за счет разработки нового автоматизированного лечебно-оздоровительного устройства и получения математической модели, описывающей его работы.
Материалы и методы исследования
Для повышения эффективности массажного воздействия разработано лечебно-оздоровительное устройство [1, 7, 8], содержащее исполнительный механизм 1 и систему управления 2 (рис. 1). Исполнительный механизм содержит корпус 3, жесткую несущую панель 4 с отверстиями 5, на которой установлена система периодически расположенных исполнительных элементов 6 в виде двумерной матрицы, обтянутой сверху эластичным материалом 7. Система управления имеет внешние устройства ввода-вывода: панель управления 8 и дисплей 9.
Исполнительные элементы 6 представляют собой пальцеобразные полые пневматические камеры, имеющие основания 10, боковые стенки 11 и рабочие площадки 12 (рис. 2).
В основании 10 имеется отверстие 13 с гибкой трубкой 14, связанной с электропневматическим распределителем 15, расположенным в корпусе 3 под несущей панелью 4. На основании 10 пневматической камеры установлен датчик давления 16. Под рабочей площадкой 12 пневматической камеры установлен датчик температуры 17 и нагревательный элемент 18. Исполнительные элементы 6 ориентированы вертикально по отношению к несущей панели 4. Под несущей панелью 4 в корпусе 3 размещены подводящие каналы высокого давления 19, связанные с ресивером 20 компрессора 21, а также проложены электрические кабели 22, связывающие электропневматические распределители 15, датчики давления 16, датчики температуры 17 и нагревательные элементы 18 с системой управления 2. Компрессор 21 с ресивером 20 могут быть расположены внутри корпуса 3, а могут быть вынесены за пределы лечебно-оздоровительного устройства.
Система управления (рис. 3) также связана с компрессором 21, с ресивером 20 и содержит центральный микропроцессор 23, запоминающее устройство 24, панель управления 8 и дисплей 9.
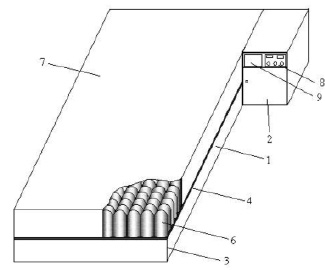
Рис. 1. Общий вид автоматизированного массажного устройства
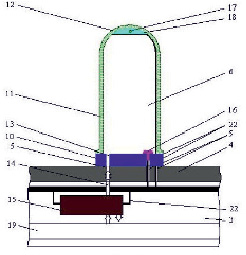
Рис. 2. Общий вид исполнительного элемента в виде пневматической камеры
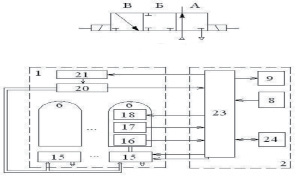
Рис. 3. Функциональная схема системы управления устройством
Работа лечебно-оздоровительного устройства осуществляется следующим образом. С помощью дисплея 9 и панели управления 8 системы управления 2 пользователь задает требуемый режим работы лечебно-оздоровительного устройства, записанный на запоминающем устройстве 24. Центральный микропроцессор 23, получая информацию от датчика давления, установленного в ресивере 20, управляет работой компрессора 21 для поддержания в ресивере 20 необходимого давления воздуха. В зависимости от режима работы центральный микропроцессор 23 системы управления 2 получает информацию по электрическим кабелям 22 от датчиков давления 16 и датчиков температуры 17, установленных в исполнительных элементах 6, в зависимости от этого центральный микропроцессор управляет отдельно каждым нагревательным элементом 18, установленным внутри пневматической камеры, и каждым электропневматическим распределителем 15, соединяя пневматическую камеру 6 с каналом высокого давления 19 или атмосферой (низкое давление), либо поддерживает внутри пневматической камеры 6 постоянное давление.
Математическое моделирование
Для математического описания процессов, происходящих во время работы устройства, разработана его математическая модель [2–3].
При выводе математической модели были сделаны следующие допущения:
– характер истечения воздуха из сопла питания воздушной подушки принят изотермическим;
– ударной силой действия струи сжатого воздуха можно пренебречь;
– постоянной времени изменения давления по площади воздушной подушки можно пренебречь.
Рассмотрим процесс работы воздушной подушки. При подаче воздуха в воздушную камеру происходит поднятие подушки, изменяется давление. При изменении давления в подушке изменяется жесткость поверхности. При избыточном давлении воздух из подушки выходит через спускной клапан.
Система уравнений, описывающих работу устройства, имеет вид:
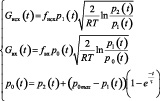 ,
,
где Gисх(t) – массовый расход воздуха, исходящего из пневматической камеры; fисх – площадь выходного сечения канала, отводящего воздух из камеры; R – газовая постоянная; Т – температура воздуха в пневматической камере; p2(t) – давление воздуха на выходе из пневматической камеры; p1(t) – среднее давление воздуха в камере; Gвх(t) – массовый расход воздуха, поступающего в пневматическую камеру;  – площадь сечения канала подачи воздуха в пневматическую камеру; dc – диаметр питающего канала; р0(t) – давление воздуха на входе в питающий канал; р0max(t) – максимальное давление питания; τ – постоянная времени нарастания давления.
– площадь сечения канала подачи воздуха в пневматическую камеру; dc – диаметр питающего канала; р0(t) – давление воздуха на входе в питающий канал; р0max(t) – максимальное давление питания; τ – постоянная времени нарастания давления.
Результаты исследования и их обсуждение
Отличиями разработанного лечебно-оздоровительного устройства является его конструктивное исполнение, при котором исполнительный механизм состоит из двумерной матрицы исполнительных элементов (пневматических камер), причем давление внутри каждой камеры и ее температура может регулироваться отдельно системой управления. При этом устройство может быть выполнено в виде матраса или подушки, предназначенных не только для создания массажного эффекта, но и для отдыха и сна людей на поверхности определенной жесткости независимо от того, находятся они в процессе лечения или восстановления в медицинских учреждениях или используют устройство в домашних условиях. Кроме того, устройство позволяет контролировать температуру и осуществлять нагрев различных частей или всего тела человека, что позволяет дополнительно улучшить кровообращение при профилактике и лечении пролежней, а также создать более комфортные условия для пациентов, например, в операционных и реанимационных отделениях. Таким образом, расширяются функциональные возможности всего устройства в целом.
С целью повышения энергоэффективности жилого здания и снижения затрат на обогрев помещения, а также при оказании дополнительного теплового массажного воздействия на тело пациента, разработанное устройство оснащено функцией подогрева, позволяющей создавать и поддерживать комфортные температурные условия в зоне сна человека. При этом централизованная система отопления квартиры или дома может работать в экономном режиме в ночное время.
Выводы
Разработанная адаптивная кластерная система, каждый элемент которой обеспечивает возможность измерения давления на поверхность и температуры, изменения уровня поверхности в вертикальной плоскости и поддержания комфортной температуры, подтверждают возможность разработки универсального матраса с изменяемым коэффициентом жесткости и формой, позволяющего удовлетворить запросы даже самых требовательных пользователей. Кроме того, матрас, оборудованный центральным микропроцессором, может выполнять и диагностические функции, например, определять температуру и вес тела лежащего на нем человека.
Полученные результаты могут быть использованы в лечебной медицине, курортно-санаторных учреждениях, повседневной жизни человека, а модификации подобных устройств – при транспортировке хрупких, взрывоопасных грузов, для захвата предметов с неизвестной или переменной формой поверхности и др.
Библиографическая ссылка
Чеснокова Е.С., Макаров А.М., Волков И.В. АВТОМАТИЗИРОВАННОЕ МАССАЖНОЕ УСТРОЙСТВО С АДАПТИВНОЙ ФОРМОЙ И ЖЕСТКОСТЬЮ ПОВЕРХНОСТИ // Современные наукоемкие технологии. 2015. № 11. С. 56-59;URL: https://top-technologies.ru/ru/article/view?id=35179 (дата обращения: 03.07.2026).