



Причинами сбоев работы информационной системы может быть воздействие внешних дестабилизирующих факторов на линию связи канала передачи данных, вызывающие отклонение параметров уровней кодированного сигнала в среде передачи данных линии связи локальной вычислительной сети с выхода цифрового модема, функциональные нарушения в декодирующих системах, а также ошибки непосредственно в оконечных устройствах (сетевой карте, компьютере, концентраторе и т.д.).
Цель работы – построение модели автоматизированного контроля линии связи канала передачи данных локальной вычислительной сети.
В работе [2] модель оперативного контроля была построена на основе анализа параметров цифровых видеосигналов и аналоговых сигналов, модулированных многоуровневой квадратурной амплитудной фазовой модуляцией [4].
Цифровое преобразование сигналов подразумевает двоичное кодирование сигналов. Когда же нужно получить высокую скорость передачи данных в условиях ограниченной полосы, прибегают к методам повышения информационной емкости передаваемых символов. Одним из таких методов является многоуровневая система, когда каждый сигнал может принимать несколько уровней амплитуды в зависимости от значения исходного символа [1] (рис. 1).
Сложность синтеза модели автоматизированного контроля линии связи канала передачи данных локальной вычислительной сети заключается в том, что необходимо произвести «совмещение» в единой системе уравнений параметры сигналов с цифровой амплитудной модуляцией (рис. 1) [6] в линии связи канала передачи данных (ЛСКПД) и цифровые сигналы оконечных устройств [4].
Решение данной задачи возможно, если использовать функциональную модель информационной системы. В функциональной модели автоматизированного контроля и диагностирования линии связи канала передачи данных локальной вычислительной сети (рис. 2) особенностью построения и работы является наличие двух входов контролирующей системы, один из которых является одновременно выходом анализируемой системы – ЛСКПД и одновременно выходом анализируемой динамической системы – сетевой карты, а другой вход контролирующего объекта является выходом оконечного устройства [5].
Объектом исследования будет являться цифровой модем, в качестве которого может использоваться сетевая карта персонального компьютера.
Так как параметры ЛСКПД подвержены воздействию дестабилизирующих факторов и не статичны, а параметры анализируемой системы квазидетерминированы, необходимо «расщепление» модели объекта, причем с дальнейшим «совмещением» по параметрам сигналов с выхода оконечной аппаратуры и сигналов с выхода цифрового модулятора.
Сигнал S(t) – оригинал, которому соответствует функция S(p), называемая изображением
 . (1)
. (1)
Переменная в этой формуле имеет смысл комплексной частоты p = α + jω.
Для сигналов, которые подчиняются условию (1), можно применить метод Лапласа [6]. Например, одиночный прямоугольный импульс, длительностью τ может быть представлен в виде:
 . (2)
. (2)
Используя свойства линейности и запаздывания для преобразования Лапласа, изображение S(p) сигнала S(t) можно записать в виде
 (3)
(3)
Тогда спектральная плотность видеоимпульса будет иметь вид
 , (4)
, (4)
а ее модуль
 . (5)
. (5)
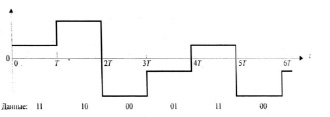
Рис. 1. Осциллограмма многоуровневого цифрового сигнала
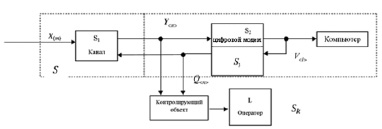
Рис. 2. Функциональная модель автоматизированного контроля и диагностирования линии связи канала передачи данных локальной вычислительной сети
В самом общем виде модель объекта может быть представлена упорядоченным множеством [3]:

где T – множество моментов времени t, в которые наблюдается объект;
X, Y – множество входных и выходных сигналов X<m> Y<l> соответственно.
Элементы вектора X<m> в зависимости от его природы являются переменными управления или возмущениями;
z – множество состояний Z<n> объекта. Элементы вектора Z<n> являются переменными состояниями объекта или фазовыми координатами, а сам вектор Z<n> – вектор состояний. Множество векторов динамической системы составляет пространство состояний (фазовое пространство). Всякое состояние (не как вид технического состояния, а положение объекта как абстрактной динамической системы в некотором пространстве в рассматриваемый момент времени) объекта Z<n> характеризуется в каждый момент времени t∈T набором переменных  , изменяющихся под влиянием воздействий и внутренних возмущений, обусловленных, например, отказами отдельных элементов объекта.
, изменяющихся под влиянием воздействий и внутренних возмущений, обусловленных, например, отказами отдельных элементов объекта.
F – оператор переходов, отражающий механизм изменения объекта под действием внутренних и внешних возмущений, то есть  ;
;  , или в векторной форме
, или в векторной форме  . В явном виде оператор F не определяется, а оценивается принадлежность состояния объекта, характеризуемого оператором F, к одному из априорно заданных видов технического состояния:
. В явном виде оператор F не определяется, а оценивается принадлежность состояния объекта, характеризуемого оператором F, к одному из априорно заданных видов технического состояния:
 ;
;  ;
;  .
.
Состояние объекта как динамической системы и его техническое состояние не являются эквивалентными понятиями. Техническое состояние объекта – это совокупность таких признаков, по которым можно судить о функциональной пригодности объекта, т.е. установить, является ли в данный момент объект исправным или неисправным, работоспособным или неработоспособным, правильно функционирующим или неправильно функционирующим и т.д. [3].
Состояние же объекта есть набор таких переменных, которые хотя и полностью определяют положение объекта как абстрактной динамической системы в некотором пространстве в рассматриваемый момент времени, но сами по себе не позволяют установить, правильно ли функционирует объект и исправен ли он. Для того, чтобы вынести такое суждение, необходимо сопоставить каждую переменную состояния объекта с некоторым конкретным значением, характеризующим уровень работоспособности (исправности) объекта или вид наблюдаемого в нем дефекта. Только на основании результатов сопоставления всех переменных состояний объекта с априорно заданными их значениями можно отнести это состояние к тому или иному виду его технического состояния. Однако такое сопоставление не всегда осуществимо, так как переменные состояния  в общем случае являются некоторыми абстрактными переменными, физическая природа которых не всегда оказывается известной, а их измерение не всегда возможно.
в общем случае являются некоторыми абстрактными переменными, физическая природа которых не всегда оказывается известной, а их измерение не всегда возможно.
В отличие от них выходные переменные  можно наблюдать и измерять, поскольку они являются вполне конкретными физическими величинами (токами, напряжениями, угловыми и линейными перемещениями и т.д.). В этом отношении выходные сигналы являются более удобными для использования их в качестве признаков при определении технического состояния объекта, т.е. в качестве диагностических признаков. Иными словами, определение технического состояния объекта практически осуществимо не в пространстве переменных состояния
можно наблюдать и измерять, поскольку они являются вполне конкретными физическими величинами (токами, напряжениями, угловыми и линейными перемещениями и т.д.). В этом отношении выходные сигналы являются более удобными для использования их в качестве признаков при определении технического состояния объекта, т.е. в качестве диагностических признаков. Иными словами, определение технического состояния объекта практически осуществимо не в пространстве переменных состояния  , а в пространстве выходных сигналов
, а в пространстве выходных сигналов  или других переменных, являющихся конкретными физическими величинами (например, параметров объекта).
или других переменных, являющихся конкретными физическими величинами (например, параметров объекта).
Возникает неопределенность в необходимости использования выходных сигналов в качестве диагностических признаков динамических систем и заданием их значений для различных видов технического состояния объекта, в частности, их номинальных значений для различных режимов нормального функционирования. Можно сформулировать, что всякому изменению вектора выхода Y<l> при фиксированном векторе X<m> соответствует определенное изменение вектора состояния объекта, т.е.
 ;
;
 ;
;  .
.
Задача. Пусть первый контролируемый объект (ЛСКПД) S1 динамической системы S, представляет собой динамическую подсистему, которая в ответ на векторное входное воздействие X<m> вырабатывает выходные сигналы (y1,y2,…,yn), составляющие вектора выходов Y<n>, которые, в свою очередь, являются входными воздействиями на второй контролируемый объект (сетевая карта) S2 динамической системы S, представляющий собой вторую динамическую подсистему, вырабатывающую выходные сигналы (b1,b2,…,b1), составляющие вектора выходов V<l>, цифровой модем осуществляет «обратное» преобразование цифрового сигнала в многоуровневый кодированный сигнал, соответственно на выходе кодера будут присутствовать выходные сигналы (q1,q2,…,qn), составляющие вектора Q<n>.
Требуется построить модель Sk, такую, чтобы ее выходы совместно с выходами объекта S удовлетворяли заданному алгебраическому соотношению вида  , инвариантную к входному воздействию X<m>(t).
, инвариантную к входному воздействию X<m>(t).
Составим эквивалентные матрицы.
Матрица системы S2
 ,
,
где  – матрица кодов;
– матрица кодов;  – матрица приращений уровней амплитуд многоуровневого сигнала в ЛСКПД, обусловленных мультипликативными и аддитивными помехами;
– матрица приращений уровней амплитуд многоуровневого сигнала в ЛСКПД, обусловленных мультипликативными и аддитивными помехами;  – матрица уровней амплитуд уровней выходных сигналов цифрового модема в ЛСКПД.
– матрица уровней амплитуд уровней выходных сигналов цифрового модема в ЛСКПД.
Матрица приращений амплитуд уровней:
 ;
;
матрица амплитуд уровней:
где dnn – приращение уровней многоуровневого сигнала, а cnn – амплитуда уровней многоуровневого сигнала, соответствующая определенным цифровым кодам, определяемым протоколом кодирования.
Наиболее употребительной моделью динамических объектов являются дифференциальные уравнения (ДУ). Необходимо использовать ДУ в частных производных, так как в дифференциальные уравнения, описывающие информационную систему передачи данных, входят функции нескольких аргументов.
Запишем дифференциальные уравнения модели динамической системы, представленной на рис. 1 в нормальной форме Коши.
 – вид дифференциального уравнения для многомерного динамического линейного объекта (ЛСКПД) S1.
– вид дифференциального уравнения для многомерного динамического линейного объекта (ЛСКПД) S1.
 – вид дифференциального уравнения для многомерного динамического линейного объекта (декодера сетевой карты) S2, причем приращение
– вид дифференциального уравнения для многомерного динамического линейного объекта (декодера сетевой карты) S2, причем приращение  будет обозначать изменение кодовой структуры цифрового видеосигнала на выходе декодера сетевой карты.
будет обозначать изменение кодовой структуры цифрового видеосигнала на выходе декодера сетевой карты.
 – вид дифференциального уравнения для многомерного динамического линейного объекта (кодера) S3.
– вид дифференциального уравнения для многомерного динамического линейного объекта (кодера) S3.
Исходя из вышеизложенного можно построить систему уравнений модели автоматизированного контроля линии связи канала передачи данных локальной вычислительной сети:
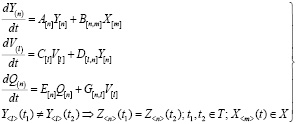
с начальными условиями
 .
.
При использовании данной модели множества входных и выходных сигналов X<m> Y<l> соответственно, можно использовать аналитические выражения 1, 2, 3 в зависимости от необходимости исследования воздействия дестабилизирующих факторов или на уровни амплитуд сигналов в ЛСКПД, или на ошибки кодов на входе оконечной аппаратуры, или на изменение спектральных характеристик сигналов в ЛСКПД.
Полученная математическая модель позволяет при проведении дальнейших исследований учитывать влияние отклонения параметров многоуровневых сигналов в ЛСКПД в результате воздействия мультипликативных и аддитивных помех на изменение кодовых структур сигналов на выходе цифрового модулятора, а также влияние дефектов в цифровом модуляторе и оконечных устройствах канала передачи данных на результаты оперативного контроля.
Библиографическая ссылка
Власов В.И., Власов С.В. МОДЕЛЬ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ЛИНИИ СВЯЗИ КАНАЛА ПЕРЕДАЧИ ДАННЫХ ЛОКАЛЬНОЙ ВЫЧИСЛИТЕЛЬНОЙ СЕТИ // Современные наукоемкие технологии. 2015. № 8. С. 13-17;URL: https://top-technologies.ru/ru/article/view?id=35089 (дата обращения: 16.07.2026).