



Общая концепция решаемых задач
Одной из основных задач, на решение которой направлено предлагаемое техническое решение, является создание беспилотного летательного аппарата с автоматизированным управлением, способного производить вертикальное приводнение, набор огнегасящей жидкости (воды) в баки при нахождении аппарата на плаву, взлетать вертикально, доставлять жидкость к месту пожара и производить её сброс на очаг пожара по сигналам бортовых датчиков.
Второй задачей является разработка такого аппарата, который мог бы иметь защищенную силовую установку от попадания брызг воды при его взлете и посадке, а также быть безопасным в эксплуатации для окружающих.
Третьей задачей является обеспечение такой компоновки аппарата, при которой баки с огнегасящей жидкостью сосредоточены в непосредственной близости от его оси с наименьшим разносом масс.
Основные требования к аппарату в рамках решаемых задач
– относительная компактность;
– безопасность эксплуатации;
– ветроустойчивость;
– отсутствие низкочастотных вибраций, присущих летательным аппаратам вертолетных схем из-за работы автомата перекоса;
– относительная простота аэродинамических исполнительных органов управления;
– достижение более высокого КПД;
– относительно небольшой разнос масс, позволяющий иметь довольно высокую маневренность аппарата.
Пути решения поставленных задач
Один из вариантов решения поставленных технических задач представлен следующим образом. Беспилотный летательный аппарат для выполнения противопожарных работ обеспечен возможностью вертикального взлёта и посадки, выполнен по дисковидной компоновке. Создание аэродинамической подъемной силы аппарата основано на эффекте «Коанда», а тяги – на использовании центростремительного расширения выходящей струи воздуха под корпусом аппарата. Он оснащен турбовальным силовым агрегатом со свободной турбиной, установленным сверху дисковидного корпуса по его вертикальной оси. Силовой агрегат имеет газодинамический и механический приводы на вентиляторы противоположного вращения. Один из вентиляторов, центробежный в кольце, прикреплённом коаксиально с зазором к внешней поверхности наружного дисковидного корпуса, нагнетает поток с изменением направления от осевого к радиальному вдоль поверхности «Коанда». Другой обеспечивает движение потока с его центростремительным расширением на выходе из внутреннего пространства дисковидного корпуса. Внутри дисковидного корпуса содержится удобообтекаемый модуль оборудования и целевой нагрузки, который размещен эквидистантно его внутренней поверхности. Внутри модуля содержатся баки для огнегасящей жидкости и различное обеспечивающее оборудование. Изменение величины подъемной силы, управление и перемещения аппарата в пространстве осуществляются в автоматизированном режиме полета отклонениями дополнительного кольцевого крыла, обдуваемого потоком воздуха реактивной струи. Развороты аппарата вокруг вертикальной оси обеспечивают выдвигаемые в поток из модуля оборудования и целевой нагрузки аэродинамические управляющие поверхности.
Существенными признаками технического решения являются:
– Применение турбовального силового агрегата, который имеет газодинамическую связь с центробежным вентилятором левого вращения и механическую связь с центробежным вентилятором правого вращения, или наоборот.
– Использование наружной поверхности аппарата, сформированной в виде поверхности «Коанда» для создания дополнительной подъемной силы путем ее обдува потоком воздуха.
– Использование центростремительной реактивной струи воздуха, истекающей из кольцевого сопла центробежного вентилятора, которая обтекает верхнюю поверхность дополнительного кольцевого крыла для создания управляемого приращения подъёмной силы.

Рис. 1
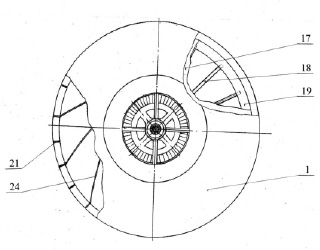
Рис. 2
– Применение подвижного подвеса крыла на эластомерных втулках, скользящих независимо вдоль опор шасси аппарата, позволяет менять углы установки крыла относительно осей X и Z.
– Использование выдвижных аэродинамических поверхностей управления по курсу и для его разворотов относительно оси Y позволяет устранить выступающие за габариты аппарата элементы.
– Использование внутреннего осесимметричного водяного бака в зоне вертикальной оси аппарата позволяет выполнять более точный сброс огнегасящей жидкости на очаг пожара.
– Использование кольцевого поплавка с обдуваемой верхней профилированной поверхностью, над которой проходит эжектируемый воздух, позволяет иметь дополнительную подъемную силу.
– на рис. 1 – вид аппарата сбоку в разрезе на водной поверхности.
– на рис. 2 – вид аппарата сверху;
Технический результат, полученный особенностями компоновки аппарата – интеграция используемых аэродинамических эффектов, поясняет возникновение его подъемной силы за счет следующих составляющих:
– использование эффекта Коанда для создания разряжения на верхней поверхности крыла;
– наддув нижней поверхности круглого крыла;
– эжектирующее действие выходящей струи воздуха на поверхность кольцевого крыла
– эжектирующее действие выходящей струи воздуха на поверхность кольцевого поплавка.
– совместное действие всех или части этих сил;
Описание конструкции и работа аппарата
Летательный аппарат для выполнения противопожарных работ (рис. 1, рис. 2), выполнен в виде дисковидного несущего корпуса, образованного двумя линзообразными поверхностями 1, 2, установленными с определенным зазором 3 одна относительно другой. Под дисковидным несущим корпусом зазор 3 формирует кольцевое сопло 4 аппарата и обеспечивает центростремительное направление расширения реактивной струи 5. Линзообразная поверхность 1 сформирована в соответствии с математическим описанием поверхности «Коанда». Одновременно, эквидистантно сформированная линзообразная поверхность 2, принадлежит модулю оборудования и целевой нагрузки 6.
Аппарат оснащен турбовальным силовым агрегатом 7 со свободной турбиной 8. Турбовальный агрегат 7 вращает центробежные вентиляторы 9, 10 во взаимно противоположных направлениях. С вентилятором 9 турбовальный агрегат 7 соединен газодинамической связью, а с вентилятором 10 – механической.
Вентилятор 9 нагнетает поток воздуха, смешанный с выхлопными газами турбовального агрегата 7, в сопло 11 и интенсивно обдувает линзообразную поверхность 1, сформированную в виде поверхности «Коанда». В результате такого обдува линзообразной поверхности 1 возникает зона пониженного давления с повышенной температурой, а с противоположной, нижней стороны поверхности модуля оборудования и целевой нагрузки 6 – зона повышенного давления, что и приводит к возникновению подъемной силы.
Вал свободной турбины 8, соединенный с центробежным вентилятором 10, вращает его, нагнетая поток в зазор 3 между двумя линзообразными поверхностями 1, 2. Далее поток направляется в центростремительном направлении в кольцевое сопло 4. Кольцевое сопло 4 обеспечивает центростремительное расширение потока 5 воздушной струи. Поток 5 направляется вдоль нижней поверхности модуля оборудования и целевой нагрузки 6 вниз и создает реактивную тягу.
Изменение величины подъемной силы, управление и перемещения аппарата в пространстве осуществляются отклонениями дополнительного кольцевого крыла управления 12, обдуваемого потоком воздуха реактивной струи из кольцевого сопла 4. Крыло 12 закреплено подвижно на эластомерных втулках, скользящих независимо вдоль опор шасси аппарата. Такая схема подвески кольцевого крыла управления 12 позволяет его противоположно расположенным частям попеременно то удаляться, то приближаться к кольцевому соплу 4 центробежного вентилятора 10. В результате меняется интенсивность обдува этих участков кольцевого крыла 12 с соответствующим изменением аэродинамических сил. Сам процесс качания кольцевого крыла управления 12 во всем диапазоне его отклонений на заданные углы относительно осей X и Z практически не сказывается на аэродинамике полета аппарата ввиду очень малых относительных значений углов его отклонения.
Силовой турбовальный агрегат 7 закреплен по оси аппарата над линзообразной поверхностью 1 посредством пилонов 13 в кольцевом обтекателе 14. Во внутренней полости кольцевого обтекателя 14 размещено электронное оборудование, БСАУ 15, системы навигации, связи, управления и телеметрии.
Модуль оборудования и целевой нагрузки 6 состоит из обшивки двойной кривизны 17, меридиональных 18 и экваториальных 19 элементов каркаса с прикреплёнными к ним узлами 20 крепления опор шасси 21. Опоры 21 являются скользящими направляющими кольцевого крыла управления 12, обеспечивающими его независимое качание по осям X и Z.
Во внутренней полости 16 модуля оборудования и целевой нагрузки 6 расположен осесимметричной бак 22 для огнегасящей жидкости и различное оборудование.
Развороты аппарата вокруг вертикальной оси обеспечивают выдвижные из модуля оборудования и целевой нагрузки 6 аэродинамические управляющие поверхности 23, установленные на его максимальном радиусе. Они имеют возможность поступательно перемещаться в радиальном направлении и в четном количестве связаны с объединенным узлом управления по курсу.
На внутренней линзообразной поверхности 1 расположены лопатки диффузора 24 центробежного вентилятора 10. Нагнетаемый вентилятором 10 в зазор 3 поток воздуха проходит между лопатками диффузора 24, расширяется, трансформируя, таким образом, в соответствии с законом Бернулли, энергию скоростного напора воздуха в энергию давления. Кроме того, направление закрутки лопаток диффузора 24 создает силу, позволяющую полностью нейтрализовать действие реактивного момента от силовой установки на конструкцию аппарата.
Для обеспечения непотопляемости аппарата на плаву при наборе воды и выполнении иных задач с базированием на водной поверхности, аппарат оснащен кольцевым водоизмещающим поплавком 25. В нижней части аппарата выполнены створки 26, обеспечивающие набор и сброс воды. Там же размещены и датчики наведения вертикального сброса воды 27.
Дополнительная подъемная сила возникает также от эжектирующего влияния выходящей из кольцевого сопла 4 струи воздуха, обтекающей поверхность кольцевого поплавка 28.
При условии превышения суммы подъемной силы и тяги аппарата над его массой аппарат взлетает.
Управление взлетом, набором необходимой высоты, горизонтальным полетом, снижением высоты и посадкой аппарата обеспечивается бортовой автоматизированной системой управления (БСАУ) 15.
Бортовая автоматизированная система управления (БСАУ) 15 содержит:
– датчики скорости полета (Vx, Vy, Vz);
– датчики угловых скоростей (ωx, ωy, ωz);
– датчики угловых отклонений (θ, γ, χ);
– датчики высоты полета (Y1, Y2);
– датчики позиционирования (GPS) (X, Z);
– бортовой процессор (БСАУ);
– подсистемы автоматизированного управления центробежными вентиляторами
(δ1, δ2) и турбовальным силовым агрегатом (δ3);
– подсистему адаптивного управления дополнительным кольцевым крылом 9 (∆1, ∆2, ∆3, ∆4);
– подсистему адаптивного управления аэродинамическими управляющими поверхностями 19;
– подсистему ввода информации (заданный маршрут, профиль полета, базовые законы управления);
– командный блок управления ЛА;
– подсистему определения зоны повышенных температур и задымления;
– подсистему набора, учета количества и сброса огнегасящей жидкости.
Взлет и набор воды для тушения очага пожара
Необходимым предварительным условием взлета аппарата является включение наземной станции управления. При этом наземная станция управления может быть установлена внутри технического средства (ТС) (возимый вариант) или находиться непосредственно у оператора (носимый вариант).
Взлет аппарата с поверхности земли осуществляется вертикально вверх при включении оператором бортовой системы автоматизированного управления (БСАУ) 15. Далее команды, необходимые для управления полетом аппарата, подает уже сама БСАУ 15. Высота подъема аппарата измеряется с помощью высотомера, входящего в состав БСАУ 15. Его показания передаются в процессор БСАУ, в котором сравниваются с заданным пороговым значением. После перехода в режим зависания аппарат сохраняет неизменной высоту своего подъема и ориентацию. Стабилизация в пространстве осуществляется автоматически по принципу автопилота, в котором имеются три канала стабилизации: курса, крена и тангажа. В качестве измерителей угловых скоростей используются микромеханические гироскопы, расположенные в бесплатформенном инерциальном блоке. После выдерживания заданной высоты зависания аппарата, наклоном дополнительного кольцевого крыла управления 12, задается пропульсивная сила, перемещающая аппарат с горизонтальной скоростью к водоему, из которого будет производиться набор воды. Над водоемом аппарат снижает горизонтальную скорость до нулевой. После зависания аппарата над водоемом плавно уменьшается подъемная сила, создаваемая центробежным вентилятором 9 при обдуве поверхности «Коанда», и обороты вентилятора 10, который обеспечивает центростремительное расширение потока воздушной струи с наддувом нижней части аппарата. По мере уменьшения подъемной силы и тяги сокращается высота полета аппарата до касания его корпуса водной поверхности. Определенная глубина погружения корпуса аппарата в водоем является сигналом для открытия створок 26 и заполнения бака 22 огнегасящей жидкостью. Дозаполнение бака 22 водой выше уровня водоема обеспечивается бортовой насосной системой. Во время нахождения аппарата на водной поверхности с целью набора воды его турбовальный силовой агрегат 7 работает в режиме «малого газа». После заполнения бака 22 огнегасящей жидкостью (водой) по сигналам, поступающим в процессор БСАУ 15 от датчиков, сервоприводы герметично закрывают створки 26. Аппарат при этом имеет положительную плавучесть и гарантию непотопляемости.
Для взлета с водной поверхности с заполненным баком 22 работа турбовального силового агрегата 7 переводится во «взлетный» режим. Аппарат отрывается от водной поверхности, набирает высоту и в горизонтальной конфигурации полета направляется к очагу пожара.
При входе в область задымления и повышенных температур, в соответствии с сигналами датчиков нахождения аппарата в такой зоне, он может снижать или, наоборот, увеличивать высоту полета и горизонтальную скорость. В зависимости от скорости и высоты распространения огня, аппарат в режиме зависания по сигналам датчиков наведения вертикального сброса воды 27 или с заданной горизонтальной скоростью производит сброс огнегасящей жидкости на очаг пожара.
Выводы
Обеспечиваемый технический результат заключается в интеграции используемых аэродинамических эффектов и особенностей компоновки аппарата, которые позволяют придать новые свойства классу летательных аппаратов, выполненных по схеме «Летающая тарелка» и использовать подобные аппараты для тушения пожаров.
Одной из особенностей аппарата является его возможность зависать и находиться некоторое время в зоне повышенных температур благодаря отводу большого количества тепла при центростремительном расширении выходящей струи воздуха в нижней части аппарата.

Рис. 3. Экспериментальная летающая модель прототипа описываемого аппарата, патент № 2518143 с приоритетом от 04.09.2012 г.
Описываемый летательный аппарат вертикального взлёта и посадки может производить компактный прицельный сброс огнегасящего состава на очаги пожара.
Аппарат имеет повышенную безопасность, надежность и эффективность при полете в условиях турбулентной атмосферы, он ветроустойчив и может быть использован для работы в горных районах, северных широтах, а также в Военно-морском флоте России.
Беспилотный летательный аппарат для выполнения противопожарных работ может приземляться на улицах и площадях городов и населенных пунктов при отсутствии там воздушных линий электропередач и связи для заполнения баков водой от существующих пожарных гидрантов.
Аппарат имеет возможность приводняться на водоемы малой глубины и площади, набирать внутрь бака воду под действием собственной массы.
Таким образом, разработана концепция беспилотного летательного аппарата, способного работать при тушении пожаров в стесненных городских условиях.
Авторами проводятся работы по изготовлению летающих моделей прототипов летательного аппарата вертикального взлёта и посадки для исследований и отработки их аэродинамических свойств, изучения динамики полета при вертикальном взлете, зависании и посадке.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ВЫПОЛНЕНИЯ ПРОТИВОПОЖАРНЫХ РАБОТ // Современные наукоемкие технологии. 2015. № 1-1. С. 7-12;URL: https://top-technologies.ru/ru/article/view?id=34981 (дата обращения: 03.07.2026).