



При современных авиационных средствах обнаружения и поражения у подводной лодки (ПЛ) шансы выжить в военное время на закрытых театрах военных действий и в шельфовых морях весьма ограничены, если она рассчитывает защититься только скрытностью, без активного противодействия, т.е. поражения противолодочной авиации [1, 2]. Поэтому для обеспечения боевой устойчивости ПЛ путем поражения противолодочных вертолетов и самолетов разрабатываются различные варианты зенитно-ракетных комплексов (ЗРК).
В целом концепция использования зенитных ракет с борта подводной лодки насчитывает несколько десятков лет, причем разрабатываются различные вариант решения:
Пуск зенитной управляемой ракеты (ЗУР) с ПЛ в надводном положении, в том числе использование стандартных переносных ЗРК.
Пуск ЗУР с перископной глубины с использованием различных подъемно-мачтовых устройств, обеспечивающих надводный старт ракете
Подводный старт из торпедного аппарата, вертикальной пусковой установки или транспортно-пускового контейнера, на глубине более перископной.
Выпуск беспилотного аппарата, при этом обнаружение и пуск ракеты с него происходит на некотором удалении от ПЛ в автоматическом режиме.
В частности в Англии в 1972 г был разработан и испытан комплекс SLAM (Submarine-Launched Air Missile) на основе ЗРК Blowpipe, испытания проводились на ПЛ HMS Aeneas (SSG-72).

Рис 1. Слева HMS Aeneas, справа комплекс SLAM
Выдвижная конструкция включала стабилизированный подвес с 6 ракетами, антенну командной радиолинии и телекамеру. Угол наведения по азимуту – 360°, по углу места – от –10° до +90°. Наведение SLAM на цель по азимуту осуществлялась синхронно с поворотом перископа, после чего оператором комплекса осуществлялся допоиск цели по углу места. После пуска ракета сопровождалась с помощью телевизионной камеры и наводилась на цель оператором.
Компания «Daimler Chrysler Aerospace/ European Aeronautic Defence and Space Company» разрабатывала управляемую ракету «Тритон» для оснащения подводных лодок. Ракета предназначалась для поражения воздушных целей, надводных кораблей, а также мобильных и стационарных береговых целей. В состав бортовой аппаратуры входят инерциальная система управления, лазерный высотомер, автопилот, тепловизионная головка самонаведения и приемопередающее устройство. на подводных лодках ракеты предполагалось хранить в транспортно-пусковых контейнерах (ТПК), которые в свою очередь загружаются в торпедные аппараты. Первоначальное обнаружение цели осуществляется гидроакустическим комплексом подводной лодки. При старте ракета выталкивается из торпедного аппарата, на безопасном расстоянии от ПЛ включается твердотопливный двигатель и раскрывается крыло ракеты. Обмен данными между ПЛ и ракетой, получение изображения объекта атаки, а также целеуказание на конечном участке траектории осуществляется по оптоволоконному каналу. Принятие УР «Тритон» на вооружение подводных лодок ВМС Германии ожидалось в 2002 – 2003 годах [3].
Компаниями «Aérospatiale / European Aeronautic Defence and Space Company» (Франция) и «Messerschmitt-Bolkow GmbH» (Германия) разработан комплекс Polypheme SM. За основу для зенитной ракеты подводного запуска взят ее противовертолетный вариант. Однако, в отличие от него, вместо стандартной ТВ-камеры ракета подводного комплекса Polypheme-SM получил тепловизионную/инфракрасную камеру. Исходные данные о наличии цели обеспечивает бортовой ГАК ПЛ. Пусковой контейнер после отстреливания всплывает по заданной траектории. Ракета заключена в прочную водонепроницаемую капсулу диаметром 240 мм, длинной 1,95 м и весом 105 кг, выбрасываемую из подводной лодки сжатым воздухом и снабженную собственным двигателем и катушкой с оптоволоконным кабелем. Стартовый двигатель позволяет капсуле с ракетой пройти под водой расстояние до 900 м. При выходе на поверхность капсула раскрывается и освобождает ракету, на которой включается двигатель, раскрывается оперение, затем включается тепловизионная камера. Запуск ракеты с ПЛ возможен с глубины до 300 м. Принятая компоновка ракеты обеспечивает дальность полета 10 км. на начальном участке полета оператор на борту ПЛ осуществляет поиск цели, используя для этого один из двух режимов: если дальность и пеленг цели определены с достаточной точностью, ЗУР выходит на траекторию перехвата; когда точное местоположение цели неизвестно, ЗУР набирает высоту с разворотом и тепловизионная камера сканирует пространство. Оператор на борту ПЛ оценивает воздушную обстановку, идентифицирует цель и захватывает ее. Наведение ракеты на выбранную цель после ее захвата осуществляется автоматически, но остается под контролем оператора [4].
Принятие на вооружение комплекса Polypheme планировалось в ВМС Германии в 2002 году, во Франции – в 2004 году [3].

Рис. 2. Проектное изображение комплекса A3SM Mast (на врезке наземные испытание комплекса)
Французская компания DCNS представила два варианта зенитного ракетного комплекса A3SM, предназначенного для самообороны подводных лодок. Первый вариант комплекса (A3SM Mast) представляет собой поворотную трубу с находящейся внутри ракетой переносного зенитного ракетного комплекса MBDA Mistral, поднимаемую на специальном мачтовом выдвижном устройстве, находящемся в ограждении выдвижных устройств подводной лодки. Целеуказание и прицеливание осуществляется с помощью опто-электронного перископа.
Второй вариант комплекса (A3SM Underwater Vehicle) использует ЗУР на основе ракеты средней дальности класса «воздух-воздух» MBDA MICA и имеет дальность стрельбы до 20 км. Ракета размещается в капcулизированной пусковой установке, аналогичной предназначенной для запуска подводных лодок капсуле противокорабельной ракет MBDA Exocet SM39, и выстреливается через стандартный 533-мм торпедный аппарат.
Компания Diehl совместно с другими компания, включая группу HDW, разработала комплекс IDAS (Interactive Defence and Attack System for Submarines) предназначенный для поражения низколетящих и низкоскоростных воздушных целей. Ракета комплекса IDAS имеет длину 2,6 м, диаметр 180 мм и вес 260 фунтов, боеголовку массой 29 фунтов и дальность стрельбы не менее 15 км.
Комплекс состоит из транспортно-пускового контейнера (ТПК) загружаемом в 533-мм торпедные аппараты, в котором располагаются четырех управляемые ракеты. Ракеты оснащены твердотопливным двигателем, тепловизионной головкой самонаведения и волоконно-оптической линией связи с подводной лодкой. Первоначальное обнаружение цели осуществляется гидроакустическим комплексом подводной лодки. Двигатель ракеты запускается в торпедном аппарате (транспортно-пусковом контейнере), ракеты выходят из аппарата как торпеды, далее в процессе движения под водой от ракеты отделяются катушки с волоконно-оптическим кабелем телеуправления, потом распрямляют управляющие поверхности. Наведение осуществляется при помощи оптико-волоконной линии связи с помощью тепловизионной/инфракрасной камеры на ракете. на воздушном участке траектории полета оператор наводит ракету на цель до захвата ее системой самонаведения.
В 2008 году был выполнен демонстрационный пуск ракет с ПЛ U33 типа 212. Первоначально IDAS систему планировалось принять на вооружение ВМС Германии в 2014 году, но программа была заморожена в рамках сокращения военного бюджета Германии.
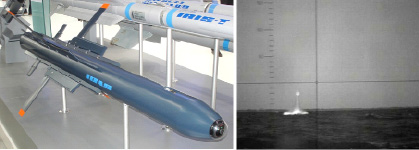
Рис. 3. Слева ракета комплекса IDAS, справа пуск ЗУР IDAS с ПЛ U-33
В США было проведено успешное испытание, с пусковой установки КР Tomahawk, размещенной на подводной лодке, была запущена УР AIM-9X Sidewinder с инфракрасной системой самонаведения. Тест проводился для Naval Sea Systems Command в U.S. Army’s McGregor Test Range в Нью-Мексико 19 ноября 2005.
В разрабатываемом комплексе Sea Serpent ракету намечено размещать в герметичной всплывающей капсуле (диаметр 0,51 м, длина 6,1 м), что позволит применять ее с глубин до 50 м. Выдачу целеуказания ЗРК планируется осуществлять по данным штатных средств освещения обстановки (гидроакустические, радиолокационные станции, перископы и комплексы радиоразведки). Принятие комплекса на вооружение подводных лодок ВМС США можно ожидать не ранее 2017 года [5].

Рис. 4. Применение ПЗРК в надводном положении это практически оружие последнего шанса
В России также ведутся работы по созданию подобных ракетных комплексов. В частности, в одном из проектов [4] используется комплекс выдвижного типа, который находится в междубортовом пространстве и не имеет проникающих частей в прочный корпус. Комплекс подготавливается к действию на глубине до 80 м, а затем ПЛ выходит на перископную глубину уже с развернутым комплексом, что позволяет произвести прицеливание и выстрел менее чем за 60 секунд. Масса контейнера вместе с ПЗРК составляет 40 кг.
Большинство разработок, основанные на телеуправлении зенитных ракет, применимы для ПЛ на малых скоростях подводного хода и с ограниченной возможностью уклонения от средств обнаружения и поражения. Управление ракетами ограниченно по нескольким причинам: с повышением скорости ПЛ теряется акустический контакт с воздушной целью, что с учетом высокоманевренных качеств цели делает наведение ракет оператором малоэффективным; возможен обрыв провода телеуправления, попадание его в винты, рули, ограждение рубки и другие выступающие части; в ряде случаев ПЛ приходится маневрировать с открытой передней крышкой ТА, что снижает живучесть ПЛ и может вызвать механическое повреждение привода передней крышки.
Поэтому отдельным направлением работ является разработки по необитаемым аппаратам вооруженных ЗРК, запускаемый из торпедного аппарата или вертикальной ПУ, для контроля воздушного пространства в районе нахождения лодки. В качестве примера можно привести противовоздушный автономный универсальный комплекс самообороны подводных лодок (RU 2382313): Он состоит из всплывающего контейнера с зенитными ракетами, выполненного разделяющимся на плавающие сегменты. Комплекс содержит системы: активации и всплытия на поверхность, развертывания, стабилизации и учета углов крена на волнении, поиска и локализации целей, поражения целей и самоуничтожения. Основной сегмент имеет в надводной части радиолокационное приемоизлучающее устройство, а в подводной части – устройство стабилизации на волнении. Способ применения указанного комплекса включает выстреливание транспортно-пускового контейнера в надводное положение из пусковой установки подводной лодки, находящейся в подводном положении.
Установка нескольких подобных аппаратов позволит теоретически создать зону боевого воздействия, в которой ПЛ может осуществлять автономное относительно безопасное маневрирование в течение времени действия комплекса, при этом воздушные объекты, оказавшиеся в пределах зоны боевого воздействия, будут автоматически обнаружены, классифицированы и обстреляны одной или несколькими зенитными ракетами. Однако данная система может быть уязвима как для авиационных средств поражения радиолокационных станций, так и для уничтожения надводными силами. Наведение ЗУР на цель осуществляеться с помощью головки самонаведения, что при значительных расстояниях и применении помех снижает вероятность наведения и перехвата цели. К тому же в ряде случаев ограничением в применении будет выступать бальность волнения и др внешние факторы.
Заключение
Дальнейшее развитие ЗРК, скорее всего, пойдет по пути разделения комплексов для ПЛ малого [7] и большого водоизмещения. ПЛ ВМФ, действующие чаще всего в открытом море, скорее всего, выберут концепцию предполагающую запуск капсулы с ракетой из торпедных аппаратов или вертикальных пусковых шахт, смонтированных на подводной лодке с дальностью поражения свыше 20 км и высотой поражения до 10 км. Применение подобных комплексов даст возможность ПЛ повысить свою безопасность от угроз со стороны противолодочной авиации.
В тоже время универсальная малогабаритная ракета для поражения морских и наземных целей, для которой поражение воздушных целей лишь одна из ее задач, является более универсальной системой, так как на закрытых морских театрах в качестве целей могут выступать и малые цели, для уничтожения которых применение торпедного оружия невозможно или не оправдано.
Библиографическая ссылка
Романова Е.А., Чернышов Е.А., Романов А.Д. РАЗВИТИЕ СИСТЕМ ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ ПОДВОДНЫХ ЛОДОК // Современные наукоемкие технологии. 2014. № 12-2. С. 227-231;URL: https://top-technologies.ru/ru/article/view?id=34968 (дата обращения: 01.08.2026).