



Беспилотные летательные аппараты, оснащенные фотоэлектрической силовой установкой, способны выполнять длительные полеты в течение нескольких месяцев, и даже лет. Продолжительность полета таких аппаратов ограничена только надежностью оборудования и их систем. Они имеют уникальное преимущество использования солнечной энергии для длительного полета в тропопаузе над большей частью поверхности Земли в условиях независимости от таких атмосферных явлений, как облачность, осадки, порывы ветра. Особенно перспективным является групповое применение таких аппаратов. Группа аппаратов, работающая совместно с наземным мобильным командным пунктом (МКП), образует систему. В основе такой системы составные части, внешние системы и сенсоры, вынесенные в пространство на управляемых платформах – беспилотных летательных аппаратах, количество которых, одновременно работающих, не ограничено.
Предлагаемое техническое решение было разработано учеными Городской общественной организации Благотворительного общества научно-технического творчества и экологии «Ювенал» города Таганрога.
Краткое описание предлагаемого технического решения
Суть данного технического решения заключается в том, что авиационная система экологического мониторинга (АСЭМ) сформирована из 5 беспилотных летательных аппаратов для экологического мониторинга типа БЛАЭМ-2, которые могут выполнять совместный многосуточный полет по специальным программам (рисунок).
Все 5 аппаратов оснащены фотоэлектрическими силовыми установками, преобразующими солнечную энергию в электрическую в дневное время полета и аккумулируемую для ночного полета. Преобразуемая от солнечных элементов энергия каждого из аппаратов используется для питания бортовой электроники, сервоприводов управления рулевыми поверхностями, целевой нагрузки и для питания электродвигателей, которые потребляют до 85 % всей энергии. Силовая установка БЛАЭМ-2 оптимизирована под определенный режим полета и интегрирована с планером аппарата.
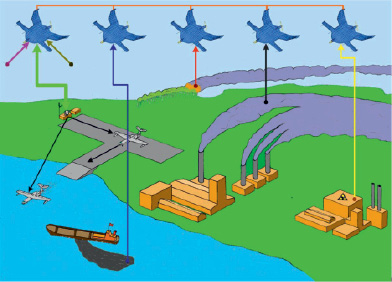
Схема работы авиационной системы экологического мониторинга (АСЭМ)
Цели технического решения
Авиационная система экологического мониторинга (АСЭМ) в многосуточных полетах ставит своими целями:
1. Обнаружение очагов пожаров и определение их интенсивности, обеспечение данной информацией авиации МЧС (самолетов-амфибий Бе-200, противопожарных самолетов Ил-76 и вертолетов);
2. Обнаружение загрязнений водных акваторий;
3. Экологический мониторинг крупных индустриальных районов;
4. Определение изменений химического состава атмосферы городов, промышленных районов, крупных лесных массивов;
5. Мониторинг развития последствий природных катаклизмов и экологических катастроф.
6. Обеспечение радиационного контроля.
Состав и оснащение беспилотных летательных аппаратов
В системе АСЭМ предусмотрен «аппарат-лидер» (БЛАЭМ-2 №1), связь наземных служб с которым обеспечена на постоянной основе.
Полезная нагрузка авиационной системы экологического мониторинга в целях сокращения массы каждого из её носителей (аппаратов БЛАЭМ-2) распределена на каждом из бортов ориентировочно в следующем составе:
● «Аппарат-лидер» БЛАЭМ-2 № 1 оснащен оптико-электронной системой (ОЭС) на гиростабилизированной платформе. Оптико-электронная система (ОЭС) снабжена автофокусировкой изображения и автоматической следящей системой, обеспечивающей захват и сопровождение подвижного объекта.
● Аппарат БЛАЭМ-2 № 2 оснащен видеоспектрометром высокой разрешающей способности, работающим в ультрафиолетовой (УФ) области спектра.
● Аппарат БЛАЭМ-2 № 3 оснащен видеоспектрометром высокой разрешающей способности, работающим в видимой области спектра, а также газоанализатором непрерывного излучения.
● Аппарат БЛАЭМ-2 № 4 оснащен видеоспектрометром высокой разрешающей способности, работающим в инфракрасной (ИК) области спектра, а также газоанализатором импульсного излучения.
● Аппарат БЛАЭМ-2 № 5 оснащен малогабаритной радиолокационной станцией (МРЛС) бокового обзора, предназначенной для получения радиолокационного изображения земной поверхности днем и ночью, в простых и сложных метеоусловиях.
Решаемые АСЭМ задачи
Полезная нагрузка авиационной системы экологического мониторинга решает следующие задачи:
● получает телевизионное, тепловизионное, радиолокационное изображения местности и передает их на командный пункт в реальном масштабе времени;
● в заданных районах методами спектрального анализа исследует состав атмосферы;
● собирает и обрабатывает полетную информацию;
● передает информацию на наземный командный пункт;
● выполняет высокоточное определение координат неподвижных и подвижных наземных объектов по указанию оператора.
Беспилотный летательный аппарат экологического мониторинга БЛАЭМ-2
Каждый из 5 беспилотных летательных аппаратов для экологического мониторинга (БЛАЭМ-2), входящих в состав АСЭМ, выполнен по аэродинамической схеме составного крыла с круглым в плане центропланом. К центроплану прикреплены консоли прямого переднего горизонтального оперения (ПГО), оснащенного элеронами для управления по крену, и консоли стреловидного заднего горизонтального оперения (ЗГО) с отогнутыми вверх поворотными элементами, обеспечивающими управление аппаратом по тангажу и курсу.
Верхняя поверхность составного крыла БЛАЭМ-2 покрыта фотоэлектрическими преобразователями (ФЭП) пленочного типа на основе соединения мышьяка с галлием (GaAs). ФЭП такого типа имеют более высокий теоретический КПД, чем кремниевые ФЭП.
В качестве двигателей на аппарате применены 2 высокоэффективных электродвигателя постоянного тока со сдвоенными якорями на основе самариево-кобальтовых магнитов (SmCo). КПД таких электродвигателей находится в пределах 90 %. Электродвигатели работают как попеременно в одиночном режиме, так и совместно. Движителем БЛАЭМ-2 является двухлопастный воздушный винт изменяемого шага. Профиль лопастей винта Эпплер 193 обеспечивает КПД винта, равный 86 %.
Получаемая в дневное время полета от ФЭП солнечная энергия обеспечивает питание электродвигателей, бортовой аппаратуры, исполнительных электромеханизмов и накапливается в электроаккумуляторах или супермаховике для дальнейшего обеспечения полета аппарата в малоосвещенное и темное время суток.
Основные характеристики БЛАЭМ-2
Используя результаты современных исследований и проектирования летательных аппаратов с фотоэлектрической силовой установкой, можно определить основные характеристики аппарата БЛАЭМ-2, представленные ниже.
Взлетная масса – 150 кг.
КПД фотоэлектрических преобразователей (ФЭП) – 22 %
Высота крейсерского полета – 18 000 м.
Продолжительность ночного полета – 12 час.
Масса целевой нагрузки –10 кг.
Относительная масса бортового оборудования без массы устройств накопления и ФЭП – 10 %
Суммарная площадь покрытая ФЭП > 40 м2.
Конструктивно-силовая компоновка БЛАЭМ-2
Конструктивно-силовой набор составного крыла с круглым в плане центропланом изготавливается преимущественно из органита 10Т и имеет достаточно большую жесткость при малой массе. Конструктивно силовая схема (КСС) круглого в плане центроплана образована совмещением внутреннего силового набора с перегородками отсеков для полезной нагрузки. Все перегородки продольного (лонжероны) и поперечного (нервюры) набора круглого в плане центроплана выполнены по балочной схеме и имеют верхний и нижний пояс и стенку.
Верхняя обшивка круглого в плане центроплана, представляющая собой мелкоячеистую сотовую конструкцию, формуется как единое целое с силовым набором. После общей сборки БЛАЭМ-2 на верхнюю обшивку наклеиваются пленочные фотоэлектрические преобразователями (ФЭП) с присоединением их токоведущих шин к контактам, заформованным в верхней обшивке. Нижняя обшивка круглого в плане центроплана в местах размещения оборудования и полезной нагрузки представляет собой отдельные съемные панели (крышки люков), которые крепятся к поясам силового набора посредством быстросъемных заклепок.
На каждой из бортовых силовых нервюр круглого в плане центроплана имеются 4 узла крепления для навески переднего горизонтального оперения (ПГО) и 4 узла крепления для навески заднего горизонтального оперения (ЗГО). Узлы изготовлены из титана ВТ-22 и заформованы в элементы лонжеронов при изготовлении конструктивно силового набора круглого в плане центроплана.
В передней части круглого в плане центроплана по оси симметрии установлен съемный обтекатель, который является носовой частью фюзеляжа. Обтекатель крепится посредством титанового крепежа к силовому набору центроплана. Он имеет лючки для доступа к оборудованию, которое закрывает.
ПГО выполнено по 2-лонжеронной схеме с нервюрами балочного типа из органита 10Т. Лонжероны выполнены по балочной схеме с заформованными при изготовлении узлами навески. Верхняя обшивка ПГО формуется совместно с силовым набором. Конструкция ЗГО аналогична конструкции ПГО, но состоит из неподвижной и поворотной частей, руля направления и высоты (РНВ). Конструкция элеронов и их узлов поворота – аналогичная конструкции ЗГО. Элероны выполнены по 2-х лонжеронной схеме. Лонжероны формуются совместно с нервюрами и верхней обшивкой. Так как между неподвижной и поворотной частями находится поворотный узел, требующий обслуживания, то нижняя панель выполнена съемной для доступа к узлу. Хвостовой обтекатель имеет конструкцию, аналогичную носовой части фюзеляжа аппарата, имеет разъемы и лючки, позволяющие обслуживать электродвигатели и редуктор БЛАЭМ-2. Крепится хвостовой обтекатель к заднему лонжерону круглого в плане центроплана посредством титанового крепежа.
Все стыки агрегатов БЛАЭМ-2 закрыты обтекаемыми зализами сложной формы, а несущие агрегаты снабжены аэродинамически совершенными законцовками.
Управление авиационной системой экологического мониторинга (АСЭМ)
Управление групповым полетом аппаратов БЛАЭМ-2 осуществляется с наземного мобильного командного пункта (МКП) оператором в полуавтоматическом или автоматическом режимах с возможностью корректировки параметров полета и управления целевой нагрузкой. На монитор компьютера МКП выводятся: электронная карта местности, координаты расположения оператора и каждого из БЛАЭМ-2, заданный маршрут полета, телеметрическая информация выполняемого задания, видеоизображение или другая информация о местности и состоянии объектов на ней в реальном времени.
В штатном полуавтоматическом групповом режиме полета оператор МКП ведет обмен информацией с бортовым комплексом автоматизированного управления, наблюдения и слежения «аппарата-лидера» (БЛАЭМ-2 №1). Собираемый с борта каждого из БЛАЭМ-2 поток целевой информации о результатах наблюдения воздушной среды, земной и водной поверхности без каких либо показателей отклонений от нормы по каналам связи направляется в территориальные управления по гидрометеорологии и мониторингу окружающей среды (УГМС), экологические структуры и т.д.
При необходимости к МКП могут быть подключены дополнительные ЭВМ для связи со специальными потребителями.
В штатном автоматическом групповом режиме полета аппаратов БЛАЭМ-2 реализуются универсальные базовые синергетические законы управления их пространственным движением. При таком управлении обеспечивается отклонение управляющих поверхностей летательных аппаратов совместно с автоматическим изменением режимов работы их силовых установок. В процессе управления в регуляторе формируется вектор управляющих воздействий с учетом всех переменных состояния системы, т.е. разбиения на отдельные контуры управления и построения изолированных следящих систем для каждого канала не производится. Это позволяет учесть динамические свойства математической модели каждого из аппаратов при аналитическом конструировании законов управления, что обеспечивает наибольшую адекватность каждой из систем управления физическому объекту, чем и является любой из аппаратов БЛАЭМ-2.
Бортовой комплекс автоматизированного управления, наблюдения и слежения каждого из аппаратов обеспечивает выполнение полетного задания с возможностью его автоматической корректировки в зависимости от окружающих метеоусловий, масштабов бедствия и пространственно-временного положения каждого аппарата. Корректировка обеспечивает соответствие траектории полета аппаратов программе группового полета, введенной в бортовой комплекс автоматизированного управления, наблюдения и слежения «аппарата-лидера» (БЛАЭМ-2 № 1).
В автоматическом режиме полета аппаратов между «аппаратом-лидером» и остальными аппаратами обеспечивается непрерывный обмен радионавигационной, телеметрической и целевой информацией.
Во внештатном режиме особыми каналами связи предусмотрена экстренная передача на Землю информации со всех аппаратов БЛАЭМ-2 системы о внезапно произошедших экологических, техногенных катастрофах и пожарах. Информация предоставляется в виде экспресс-результатов их анализа в инфракрасном, ультрафиолетовом, видимом спектрах и в виде телевизионного изображения оператору МКП. Далее, по согласованию с ответственным за наблюдения по МКП, она передается в виде экстренной информации на Командный пункт аэродрома базирования самолетов-амфибий Бе-200, противопожарных самолетов Ил-76 и вертолетов.
При опасном приближении аппарата к границам зоны устойчивого обеспечения связи на землю подаются предупреждающие радиосигналы с одновременным уводом аппарата от границ этой зоны.
Выводы
К числу достоинств данной разработки можно отнести:
1. Малые габариты и небольшой разнос масс конструкции аппаратов БЛАЭМ-2.
2. Значительный потолок их полета, где дуют ветры в одном направлении.
3. Малая скорость при работе и посадке.
4. Большая продолжительность полета.
5. Возможность зависания над точкой наблюдения.
6. Возможность дублирования получаемой информации.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. АВИАЦИОННАЯ СИСТЕМА ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА (АСЭМ) // Современные наукоемкие технологии. 2014. № 11. С. 7-11;URL: https://top-technologies.ru/ru/article/view?id=34762 (дата обращения: 15.06.2026).