



На протяжении долгого времени для управления фотоэлектрическими батареями используются MPPT-контроллеры, следящие за точкой максимальной мощности, например [1], [2]. Так, например, и в настоящее время разработчики пишут: «...максимальная мощность снимается только тогда, когда угол падения солнечных лучей к батарее близок к 90 градусам. Главная задача системы – отследить движение солнца и в течение дня обеспечивать именно такое расположение батарей» [3].
Однако, по мнению автора, использование контроллеров не является необходимым, есть более простые и надёжные способы обеспечения максимальной мощности. В процессе применения солнечных батарей на поверхности Земли отсутствует необходимость следить за точкой максимальной мощности. Фотоэлектрическая батарея на поверхности расположена в конкретной местности с заданной географической широтой и долготой. Для каждой точки на поверхности Земли можно заранее рассчитать азимут и высоту Солнца над горизонтом на любой момент времени в будущем, таким образом, отпадает необходимость в использовании контроллеров. За счёт отсутствия лишних движений, которые совершались бы при поиске максимальной мощности, можно экономить значительное количество энергии.
Существует по меньшей мере два метода решения этой задачи:
1) Использование уже существующих программ, вычисляющих координаты Солнца (высоту над горизонтом и азимут), например, «All Stars» и управление фотоэлектрическими батареями с помощью данных, выдаваемых этими программами.
2) Непосредственное вычисление с помощью формул. Будем считать, что задана правоориентированная система координат и ось Ох направлена на юг, а ось Oy на восток. Пусть T – период вращения Земли вокруг своей оси. Наиболее просто координаты нормированного вектора, соответствующего направлению на Солнце, задаются в этой системе координат для точки на северном полюсе при нулевом склонении Солнца, а именно по следующему закону:

Если склонение Солнца составляет угол  , то координаты нормированного вектора, направленного на Солнце:
, то координаты нормированного вектора, направленного на Солнце:

Если точка расположена на широте j, то небесная сфера поворачивается на угол (90°–j) в плоскости Oxz. Применим к исходному вектору линейный оператор поворота в плоскости Oxz, учитывая, что cos(90°–j) = sin (j) и получим координаты нормированного вектора, направленного на Солнце:
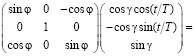
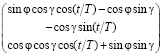 .
.
При этом в нулевой момент времени Солнце находится на юге. Cклонение g может быть задано в виде <<pri6.wmf>>, если за начало отсчёта принять момент весеннего равноденствия. Здесь S – период обращения Земли вокруг Солнца, то есть год, b – угол наклона экватора планеты по отношению к плоскости эклиптики.
Таким образом, известны координаты нормированного вектора, направленного на Солнце. Отсюда легко находятся такие параметры, как высота Солнца над горизонтом и азимут.
Даже в весьма грубом первом приближении, без учёта эксцентриситета орбиты Земли, отклонение от вычисленного положения Солнца не превысит 10 градусов. Учитывая, что cos(10°) = 0,9848, можно утверждать, что потери энергии не превысят 2 %, что сопоставимо с потерями из-за совершаемых лишних движений, служащих в настоящее время для поиска положения максимальной мощности. Если же использовать данные о склонении Солнца на каждую дату из астрономических баз данных, то есть учитывать эксцентриситет орбиты Земли, точность наведения на Солнце без использования контроллера приблизится к 100 %.
Автором разработана компьютерная программа, которая вычисляет направление на Солнце для любого момента времени для точки, расположенной на заданной широте. Программа может быть интегрирована с системой управления положением фотоэлектрическими батареями, повысить эффективность использования фотоэлектрических батарей. При этом не требуется контроллер, совершающий поиск режима максимальной мощности.
Библиографическая ссылка
Приходовский М.А. БЕСКОНТРОЛЛЕРНЫЙ СПОСОБ ДОСТИЖЕНИЯ МАКСИМАЛЬНОЙ МОЩНОСТИ ФОТОЭЛЕКТРИЧЕСКОЙ БАТАРЕИ // Современные наукоемкие технологии. 2014. № 10. С. 34-35;URL: https://top-technologies.ru/ru/article/view?id=34718 (дата обращения: 17.07.2026).