



Введение
Для приводов транспортно-технологических машин автором разработаны четыре схемы бесшатунных замкнутых дифференциалов зубчатого типа [1, 2, 3, 4] с улучшенными техническими параметрами. Исследования параметров их движения расчетным методом показали, что:
– они могут формировать точную прямолинейную траекторию выходного звена при особой кинематике сателлита и центрального колеса;
– колеса движутся с постоянной угловой скоростью, а точки прямолинейного движения – по графику синусной гармонической функции;
– при нарушении кинематики прямая вырождается в циклическую гипоциклоиду, описывающую окружность за множество цикловых повторений;
– при нарушении радиуса положения точки на сателлите с прямой траекторией прямая преобразуется в устойчивый эллипс с малой осью, равной удвоенному отклонению;
– сопротивление движению механизмов каждой схемы различно, поэтому не все схемы можно приводить в движение через водило;
– КПД при разных входных валах различный, что позволяет найти экономичную конструкцию при свободном выборе ведущего вала.
Эти результаты теоретических исследований свидетельствуют о повышенном качестве новых дифференциальных схем, но требуют практического подтверждения для правильного выбора их параметров при проектировании приводов машин. Для проверки эффективности работы новых схем в реальных приводах были изготовлены четыре модели механизмов и экспериментальная установка с измерительным комплексом.
Методика исследования
и оборудование
Модели дифференциалов изготовлены для обобщенного анализа и не связаны с конкретными приводами машин (рис. 1). Для всех схем принят прямолинейный ход 120 мм, который позволил при Zmin = 20 мм принять модуль m = 1,5 мм. В результате анализа возможных вариантов рассчитан эксцентриситет е = 30 мм для всех моделей, а величину отклонения радиусов сателлита и центрального колеса Δ (рис. 2) приняли с таким условием, чтобы оно имело общие сомножители с величиной е:
Схема 1 – Δ = + 15 мм,
Схема 2 – Δ = –15 мм,
Схема 3 – Δ = – 45 мм,
Схема 4 – Δ = – 75 мм.
Значения чисел зубьев колес и передаточное число замыкающей ступени моделей по схемам даны в табл. 1.
Для испытания моделей собрана исследовательская установка (рис. 3) не промышленного изготовления.
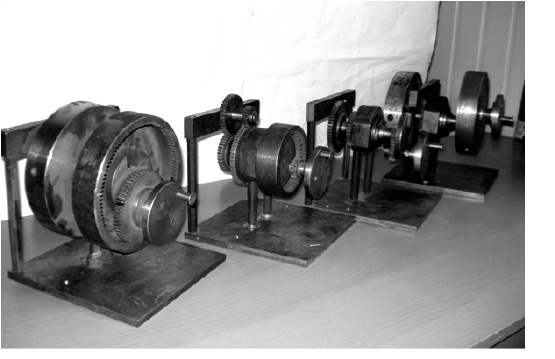
Рис. 1. Внешний вид моделей механизмов, по схемам 1, 2, 3, 4 слева направо и схема
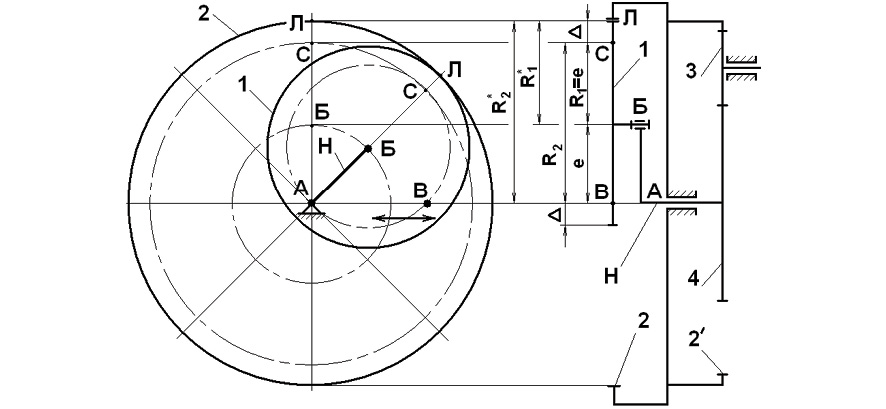
Рис. 2. Схема с обозначениями размеров на примере модели №1
Таблица 1
Параметры моделей для исследования
|
№ схемы |
Δ |
U24 |
Z1 |
Z2 |
Z2' |
Z3 |
Z3' |
Z4 |
|
Схема 1 |
+15 |
– 1/5 |
60 |
100 |
100 |
40 |
– |
20 |
|
Схема 2 |
-15 |
1/3 |
20 |
60 |
60 |
20 |
40 |
40 |
|
Схема 3 |
-45 |
3 |
20 |
20 |
40 |
40 |
20 |
60 |
|
Схема 4 |
-75 |
-5 |
60 |
20 |
20 |
40 |
– |
100 |
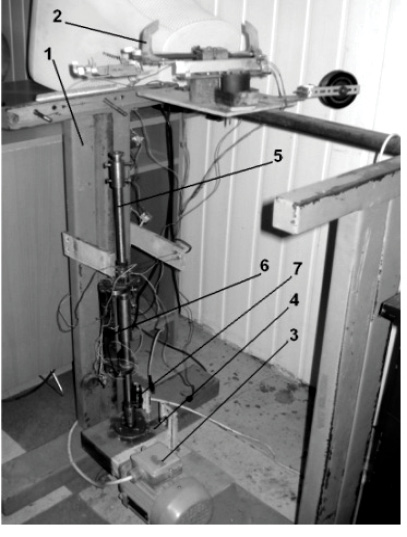
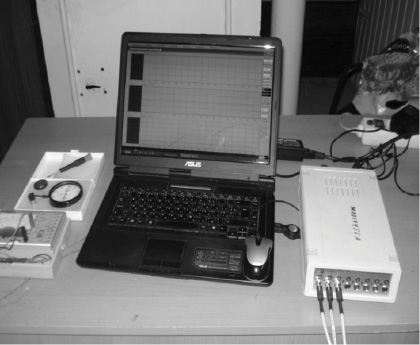
Рис. 3. Внешний вид экспериментальной установки и измерительного комплекса
Она состоит из рамы 1, каретки с датчиками движения 2, электродвигателя 3, редуктора 4, приводного вала 5 (жесткая пальцевая муфта, втулочные муфты, валы-удлинители), датчика крутящего момента 6, питающего элемента 7. Измерительная аппаратура (рис. 3) состоит из тензометрической станции А17-Т8, предназначенная для регистрации активных электросигналов с датчиков по 8-ми каналам одновременно, переносного компьютера для регистрации осциллограмм, часового тахометра и прибора контроля электросигнала.
Использованы самодельные датчики: перемещения подвижной каретки – реостатного типа, датчик линейной скорости – индукционного пассивного типа, датчик крутящего момента – тензометрический.
Результаты исследования
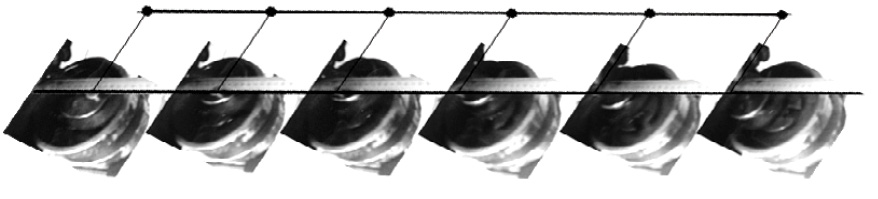
Для проверки условий существования прямой траектории в моделях получена картина обкатывания мнимой окружности на сателлите с радиусом е по геометрическому месту центров скоростей 2-го звена с радиусом 2е, как в базовом планетарном механизме (рис. 4).
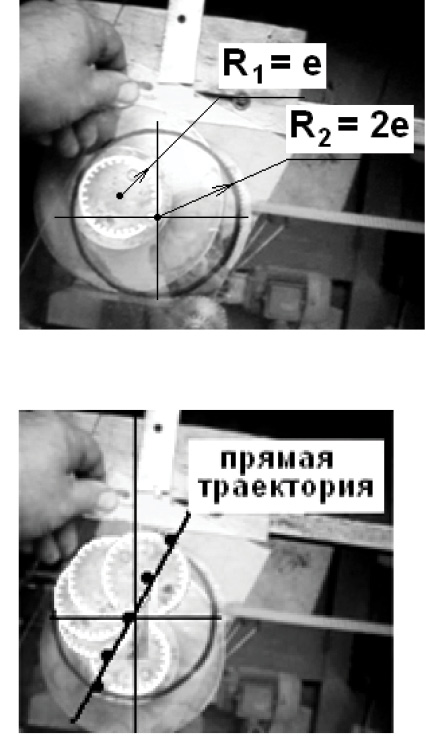
Рис. 4. Картина обкатывания
мнимых окружностей
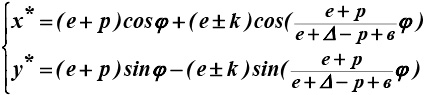
В соответствии с расчетами, обобщенная погрешность для радиусов схемы дифференциала равна:
где в – ошибка в размере радиусов R и r.; δ – величина изменения Δ; р – зазор в подшипниках опор; Δω2 – приращение угловой скорости центрального колеса.
Для всех ошибок, включая ошибку положения k точки на сателлите, траектория точки В описывается координатами гипоциклоиды:
При обнулении ошибок, кроме k, получаем уравнение эллипса (рис. 5):
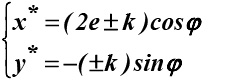
Уравнение показывает, что малая ось эллипса равна 2k, так как при обратном ходе получаем (–sin φ). А сам ход может быть короче или длиннее.
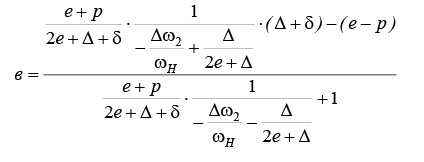
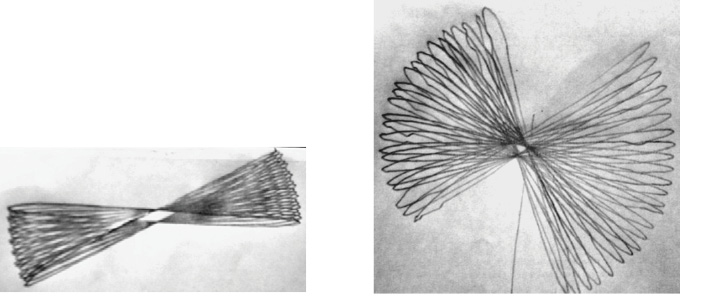
Исследование траектории точки на сателлите на прямолинейность выполнено методом киносъемки и методом вычерчивания траектории (рис. 5). При округлении числа зубьев колес замыкающей ступени образуется гипоциклоида (рис. 6).


Рис. 5. Формы траектории при наличии k – теоретическая сверху, экспериментальная снизу
а)

б)
в) г)
Рис. 6. Фотокартина положений и рисунки форм прямолинейной траектории точки:
а – фотокартина траектории движения точки; б – нормативная прямолинейная траектория;
в – гипоциклоида при отклонении в 1 зуб; г – при отклонении в 3 зуба
Теоретически получены уравнения моментов на потенциальных ведущих валах звеньев 2, 3, Н с учетом КПД шарниров ηш и зацеплении ηзуб:



Рассмотрен также вариант с дополнительными моментами М2ДОП и М3ДОП, действующими извне на центральное колесо 2 и на замыкающий блок 3:



Кинематику исследовали визуально по картинам траекторий и осциллограммам перемещения и скорости точки точного прямолинейного движения. Осциллограммы изменения перемещения и скорости прямолинейного движения точки на сателлите записаны одновременно через тензометрическую станцию А17-Т8. (рис. 7).
Момент кручения так же записывался тензостанцией для всех моделей вместе с кинематикой. Анализ сходимости моментов с расчетом показан в таблице 2. Средняя сходимость результатов составила 11,3 %.

Рис. 7. Пример записи сигналов кинематики прямолинейного движения
Таблица 2
Анализ крутящего момента на водиле моделей
| Параметр | Модель 1 | Модель 2 | Модель 3 | Модель 4 |
| Экспериментальные моменты, Н*м | ||||
|
МАМП |
0,8 | 1,127 | 1,679 |
2,08* |
| Расчетные моменты, Н*м | ||||
|
МНмах |
0,892 | 0,975 | 1,476 | 2,2* |
| % сходимости | 10,3% | 15,6% | 13,8% | 5,5% |
* – модель №4 проворачивалась через вал колеса №2
Выводы
В результате экспериментальных исследований:
– подтверждены наличие мнимой окружности качения сателлита, и формирование прямолинейной траектории без направляющей;
– показано, что кинематика соответствует гармоническому;
– показано, что при появлении ошибки в положении точки прямолинейного движения образуется стабильный эллипс;
– при округлении числа зубьев замыкающей ступени даже на один зуб появляется гипоциклоида с растущим нарушением прямой траектории;
– со средней ошибкой в пределах 11,3 % подтверждены уравнения моментов на ведущих валах Н, 2 и 3;
– показано, что модель № 4 [4] не проворачивается через водило Н из-за самоторможения. Меньшее сопротивление прокручиванию на валах замыкающей ступени 3 и центрального колеса 2.
Библиографическая ссылка
Зайкин О.А. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ПАРАМЕТРОВ ДВИЖЕНИЯ БЕСШАТУННЫХ ЗУБЧАТЫХ ДИФФЕРЕНЦИАЛОВ С ПОСТУПАТЕЛЬНЫМ ДВИЖЕНИЕМ БЕЗ НАПРАВЛЯЮЩЕЙ // Современные наукоемкие технологии. 2014. № 3. С. 40-45;URL: https://top-technologies.ru/ru/article/view?id=34107 (дата обращения: 15.07.2026).