



Наряду с традиционными «последовательными» кинематическим схемами станков, допускающими независимое изменение узлов по одной из координат при неизменном значении других координат, в последние годы появился новый класс металлорежущих станков с «параллельной» кинематикой, у которых все координаты связаны и перемещение по любой одной координате требует одновременного согласованного изменения всех других. Отличительной особенностью таких станков является связь посредством шарнирных штанг узла, на котором установлена обрабатываемая деталь, с узлом, несущим инструмент, причем требуемая траектория перемещения инструмента относительно детали достигается согласованным изменением либо длин этих штанг, либо угловых и линейных положений штанг постоянной длины. К станкам со штангами переменной длины относятся так называемые «гексапод» (с 6 штангами) и «трипод» (с 3 штангами).
Гексаподы рассматриваются в качестве альтернативы нынешним 5- координатным станкам. Исследуется вопрос относительно целесообразности применения гексаподов для 3- координатной обработки. Следует отметить, что большее количество штанг у гексапода обеспечивает его более высокую жесткость. Кроме того, различные компенсации у структуры с шестью степенями свободы выполнять легче, чем у структуры с тремя. Другими словами, факторами, обусловливающие выбор гексапода, являются высокая жесткость его структуры, возможность компенсации характеристик и гибкость применения.
Для синтеза системы управления гексапода построена его 3D-модель в программном комплексе Solidworks (рис.1). При этом использовались следующие допущения:: сферические шарниры считались идеальными, зазоры в конструкции отсутствовали, упругость стержней не учитывалась. На рисунке: 1- платформа, 2 – основание гексапода. Для построения 3D-модели использовались следующие размеры гексапода: диаметр платформы – 400 мм; диаметр основания - 650 мм; длина стержней – 600 мм. Возможности данного программного комплекса позволяют импортировать, с помощью SimMechanics CAD translator, построенную 3D-модель гексапода в программу MatLab.
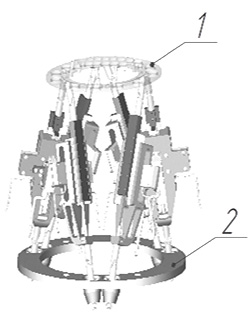
Рис.1 – 3D- модель гексапода в программном комплексе Solidworks
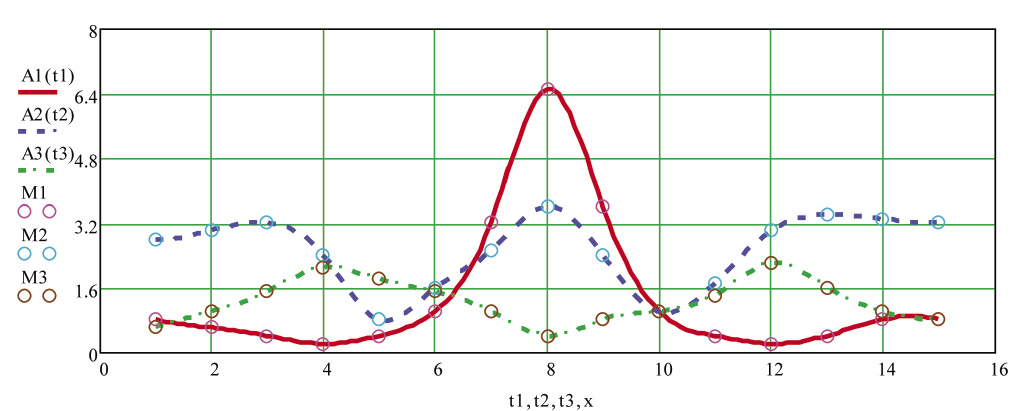
Рисунок 6 – Обобщенный график зависимостей амплитуд вибраций пластины от места производимого измерения на первой (A1(t1)), второй (A2(t2)) и третьей A3(t3)) резонансных частотах
В программе MatLab выполнено математическое моделирование гексапода. Рассматриваемый манипулятор представлен на схеме (рис. 2) в виде платформы 3, с которой снимаются данные о положении (position) и скорости (velocity) изменения длин штанг.
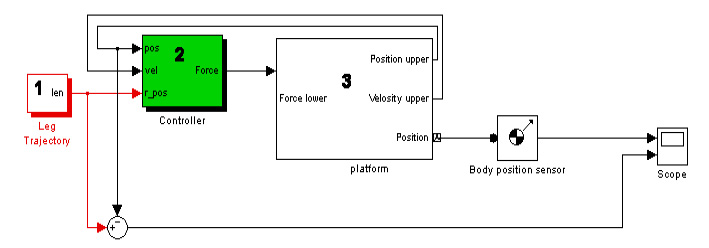
Рис. 2. Схема гексапода в среде Matlab
Блоки 1 отвечают за пересчет задания, получаемого в виде координат и углов верхней платформы, в изменения длин штанг платформы. Схема процесса представлена на рис. 3. При этом углы поворота платформы пересчитываются в перемещения с помощью формул Эйлера. Блоки 2 в данном случае являются ПИД-регуляторами. Таким образом, в модели в неявном виде присутствует прямая и обратная задачи кинематики.
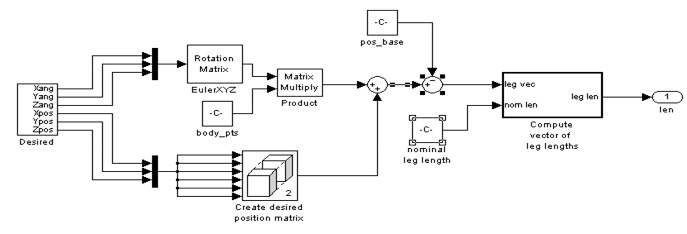
Рисунок 3. - Схема пересчета траектории движения штанг платформы гексапода
Полученные с помощью формул Эйлера перемещения затем складываются с матрицей перемещений 1, а полученные линейные перемещения центра масс платформы преобразуются в изменения длин штанг в блоке 2 (рис.4).
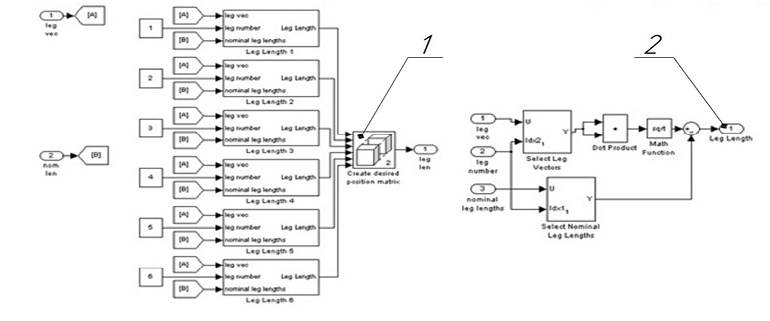
Рис. 4. - Схема преобразования линейных перемещений в изменения длин штанг
Каждая опора гексапода в программе MatLab представляется моделью (рис. 5). Блоки ActuatorAssm 1-1… ActuatorAssm 6-1 поз.1 представляют собой модель каждой штанги платформы. При моделировании полученное требуемое значение длины штанги сравниваетcя с текущим и подается на систему управления, вырабатывающую значение силы, подаваемой на приводы штанг.
На рис.6 показаны графики изменения положения координат центра платформы от времени. Цифрами 1, 2, 3 обозначены кривые изменения положения центра платформы по координатам x, y ,z соответственно. На рис.7 показаны ошибки позиционирования штанг гексапода. Кривыми 1-6 обозначены ошибки позиционирования каждой из штанг манипулятора в определенный промежуток времени
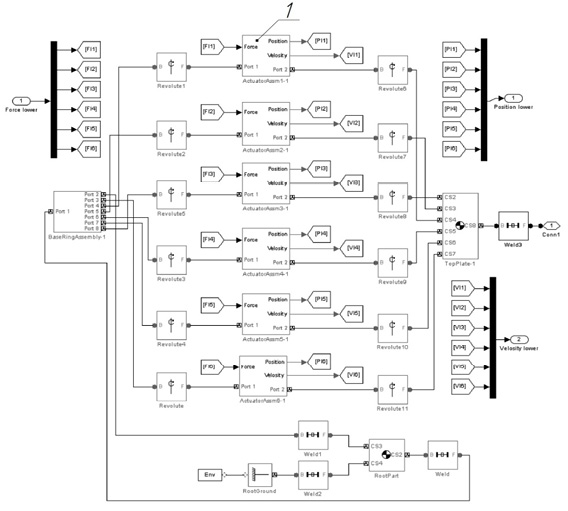
Рис.5 - Схема моделирования опор гексапода
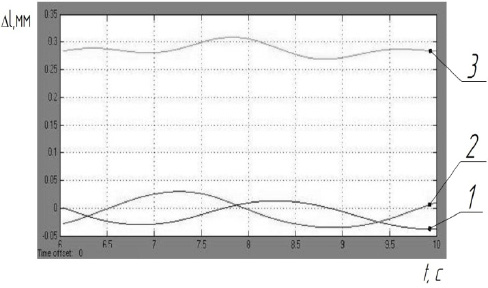
Рис.6 – Графики изменения положения координат центра платформы
Рис.7– Ошибки позиционирования штанг гексапода
Ошибки позиционирования штанг, показанные на графиках, связаны с ошибками системы управления гексаподом. На основании данных зависимостей можно сделать вывод о том, что при синтезе системы управления гексаподом возникают минимальные ошибки позиционирования штанг. Однако, даже с учетом допущений, процесс получения ошибок системы управления получился очень длительным из-за инвертирования основанного на решении обратной задачи кинематики Якобиана, при котором производится длительный пересчет задания в имитационной модели.
Библиографическая ссылка
Малышев Д.И., Мамаев Ю.А., Гунькин А.А. ВИРТУАЛЬНАЯ 3D-МОДЕЛЬ СТАНКА-ГЕКСАПОДА С ИСПОЛЬЗОВАНИЕМ ПРОГРАММ Solidworks И Matlab // Современные наукоемкие технологии. 2014. № 5-1. С. 72-74;URL: https://top-technologies.ru/ru/article/view?id=33709 (дата обращения: 03.07.2026).