



Вертолет как объект авиационной техники является одним из наиболее сложных из летательных аппаратов, разработка, строительство и эксплуатация которого зависят от эффективного решения множества задач в различных областях науки и техники: аэродинамики, динамики полета, теории колебаний, аэроупругой устойчивости, статической и усталостной прочности, технологии, материаловедения и др.
Вертолет с несущим винтом является самым эффективным летательным аппаратом на режиме висения. Способность вертолета осуществлять висение, вертикальный взлет и посадку, осуществлять полет на режиме авторотации является основным преимуществом вертолета как летательного аппарата.
Однако несущий винт как движитель имеет известные ограничения по скорости горизонтального полета, что делает его не столь эффективным на режимах горизонтального полета, причем эффективность снижается с ростом скорости.
У вертолетов, используемых в противолодочной авиации, вследствие особенностей их аэродинамической схемы крейсерские скорости полета ограничены, что не позволяет иметь высокие среднепутевые скорости на средних и дальних расстояниях полета в зонах морей и океанов.
Приняв средние скорости полета на маршруте (для вертолетов – 250 км/ч, для самолетов и СВВП – 500, 700, 1000 км/ч), задавшись непроизводительным временем (для самолета – 3 часа, для вертолета и СВВП – 1 час, учитывая, что они могут базироваться на посадочных площадках незначительных размеров), получим, что наибольшие среднепутевые скорости на дальностях до 100 км обеспечивает вертолет или СВВП. При дальностях свыше 200 – 300 км более выгодно, с точки зрения оперативности достижения заданного района, использование винтовых СВВП, имеющих крейсерскую скорость 500 – 700 км/ч и только на дальностях 2000 – 4000 км использование самолетов становится выгодным наряду со скоростными СВВП. Поэтому естественно стремление изобретателей и конструкторов создать новый тип летательного аппарата с вертикальным взлетом и посадкой (ЛАВВП), в котором сочетались бы возможности скоростных свойств самолета с вертикальным взлетом и посадкой как у вертолета.
Истоки аэродинамической схемы рассматриваемого аппарата. В процессе определения облика летательного аппарата вертикального взлета и посадки, предназначенного для службы в Военно-морском флоте, авторами было рассмотрено множество достоинств и недостатков аэродинамических схем летательных аппаратов: глиссирующих гидросамолетов и самолетов-амфибий, начиная с гидросамолета Бе-6, Бе-8, Бе-12, самолета-амфибии А-40 «Альбатрос».
Были рассмотрены и тщательно проанализированы аэродинамическая компоновка уникальной вертикально взлетающей амфибии ВВА-14, построенной в СССР в 70-е годы, компоновка вертикально взлетающего беспилотного летательного аппарата, разработанного в ОКБ им. А.С. Яковлева «Альбатрос».
Рассмотрены компоновки зарубежных пилотируемых и беспилотных летательных аппаратов: СВВП с поворотными силовыми установками Boeing V-22 «Osprеу» USA, БПЛА «Игл Ай», проект фирмы Нортроп Грумман UNSA STOVL, БПЛА «Сайфер-2».
В результате анализа выбрана следующая аэродинамическая компоновка.
Летательный аппарат вертикального взлета и посадки оснащен круглым в плане аэродинамическим крылом, в котором выполнено круглое отверстие. Концентрично отверстию в тяговом кольце установлены с возможностью их вращения соосные воздушные винты. Тяговое кольцо имеет возможность поворота из горизонтального в вертикальное положение относительно оси OZ, лежащей в плоскости хорд. К круглому аэродинамическому крылу прикреплены фюзеляж и стреловидные несущие поверхности, на которых размещены элевоны. Тяговое кольцо соединено с силовой установкой посредством пилонов, а с крылом посредством осей. Снизу круглого крыла эквидистантно его внутренней поверхности установлен круглый водоизмещающий поплавок, который может выпускаться при вертикальной посадке аппарата на водную поверхность и удерживать аппарат на плаву. В полете поплавок может прижиматься к нижней поверхности кольцевого крыла, образуя аэродинамический профиль. При стоянке на земле аппарат опирается на убираемые в полете опоры шасси.
Сопоставительный анализ выбранной аэродинамической компоновки с известными техническими решениями говорит о том, что наиболее близким решением является летательный аппарат вертикального взлета и посадки с кольцевым крылом по Патенту РФ № 2002670 В64С 27/00 от 30.03.1990 автора Воронкова Ю.С.
Описание и некоторые особенности конструкции летательного аппарата. Конструкция летательного аппарата (ЛА) поясняется чертежами и схемами.
На рис. 1 изображен вид сбоку ЛА в режиме горизонтального полета;
на рис. 2 – то же (режим взлета/посадки с водной поверхности);
на рис. 3 – то же (режим взлета/посадки с земной поверхности);
на рис. 4 – ЛА вид сверху;
на рис. 5 изображена схема управления поворотами тягового кольца;
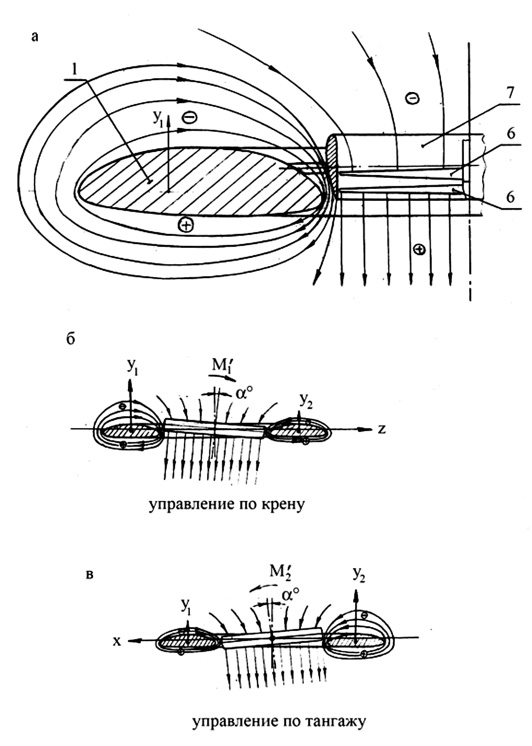
на рис.6 изображен аэродинамический спектр распределения давлений между тяговым кольцом и кольцевым крылом при управлении аппаратом по тангажу и крену.
Летательный аппарат вертикального взлета и посадки содержит кольцевое крыло 1, фюзеляж 2, стреловидные несущие поверхности 3, установленные на кольцевом крыле 1, выполненные в виде отклоненных вверх от поперечной оси аппарата аэродинамических поверхностей с рулями (элевонами) 4, поворотную силовую установку 5 с соосными воздушными винтами 6 в тяговом кольце 7. Поворотная силовая установка 5 закреплена посредством пилонов 8 в тяговом кольце 7, размещенном в центральном отверстии 9 кольцевого крыла 1 концентрично. Поворотная силовая установка 5 имеет возможность поворота вокруг оси Z. Синхронизированные приводы 10 вращения силовой установки 5 обеспечивают поворот силовой установки вокруг оси ОZ (рис. 5).
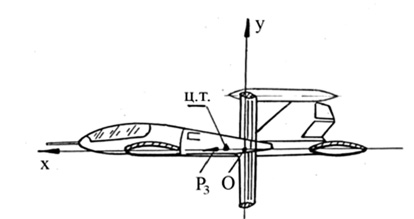
Рис. 1
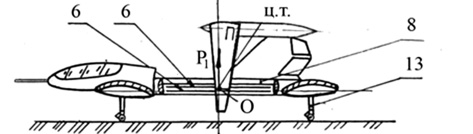
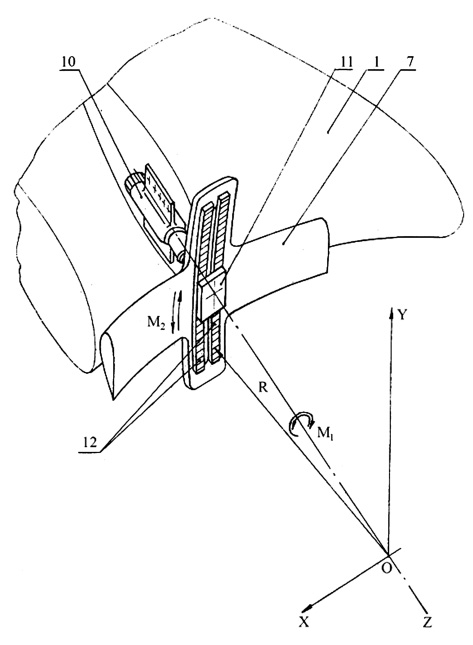
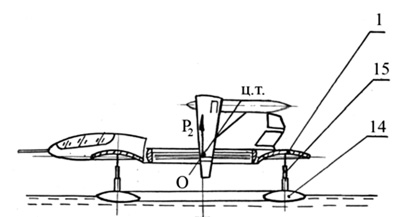
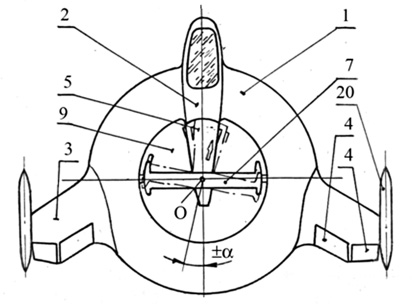
Рис. 5
Поворот силовой установки 5 относительно оси ОХ (рис. 5) обеспечивают синхронизированные линейные приводы, состоящие из ползунов – роторов 11 – и направляющих, выполненных по радиусу вращения R – статоров 12. Ползуны – роторы 11, взаимодействуя с электромагнитными полями статоров 12 во взаимопротивоположных направлениях, создают пару сил, поворачивающую тяговое кольцо 7 относительно оси ОХ. Эти же приводы в горизонтальном полете обеспечивают повороты тягового кольца 7 относительно оси OY.
При стоянке на земле аппарат опирается на убираемые в полете опоры шасси 13. Для обеспечения взлета с водной поверхности и удержания аппарата на плаву он снабжен убираемым в полете поплавком 14, который убирается и выпускается телескопическими приводами 15.
Бортовое радиоэлектронное оборудование (БРЭО). БРЭО включает в себя пилотажный и навигационный комплексы, поисково-прицельную систему и другое специализированное оборудование. Пилотажный комплекс обеспечивает автоматизированное зависание и висение аппарата со стабилизацией высоты и положения аппарата над водной поверхностью. Навигационный комплекс реализован на основе комплексирования инерциальных навигационных систем со спутниковыми навигационными и корреляционно-экстремальными системами навигации по геофизическим полям Земли. Он совместно с пилотажным комплексом предназначен для обеспечения полета по заданному маршруту, вывода аппарата в заданную точку, привода аппарата в зону действия посадочных средств корабля, инструментальной посадки, обмена информацией с кораблем и другими летательными аппаратами, перелета из одной точки висения в другую при гидроакустическом поиске и обмена информацией с системами других летательных аппаратов.
Поисково-прицельная система образована четырьмя подсистемами: гидроакустической, радиолокационной, индикации навигационно-тактической обстановки и информационно-вычислительной. Расположенная в убираемом в полете поплавке 14 опускаемая гидроакустическая станция является главной составляющей поискового противолодочного оборудования. Радиолокационная подсистема представлена РЛС кругового действия, которая расположена в обтекателях 20 стреловидных несущих поверхностей 3. Данная система обеспечивает поиск и обнаружение подводных лодок, находящихся в любом положении, выработку необходимых данных для применения средств уничтожения подводных лодок, расчет необходимых точек зависания, определение координат и выработку данных целеуказания для взаимодействия с другими летательными аппаратами и т.д. В состав поискового противолодочного оборудования входит также магнитометр и приемно-индикаторное устройство. Данное устройство обеспечивает автоматический обзор выставленных радиогидроакустических буев, прослушивание их передатчиков информации и привод аппарата на работающий буй.
Противолодочные средства. Вооружение летательного аппарата может применяться в поисковом и поисково-ударном вариантах. В поисковом варианте аппарат загружается радиогидроакустическими буями. В качестве средств поражения применяются высокоэффективные противолодочные торпеды и противолодочные бомбы. Не исключается применение современных противокорабельных ракет и системы отстрела ложных тепловых целей.
Работа аппарата. При взлете с земной поверхности (рис. 3) летательный аппарат (ЛА) вертикального взлета и посадки управляется бортовой системой автоматического управления (БСАУ) и работает следующим образом.
Аппарат, опираясь на земную поверхность посредством шасси 13, имеет положение тягового кольца 7 совместно с закрепленной в нем силовой установкой 5 и соосными винтами 6, при котором плоскость вращения воздушных винтов 6 в кольце 7 параллельна земной поверхности. Центр тяжести аппарата при этом расположен на вертикальной оси аппарата OY.
При вращении соосных воздушных винтов 6 в кольце 7 силовой установки 5 создается тяга P1. При достижении силы тяги P1, равной массе аппарата, он взлетает. В зазор между кольцом 7 и кольцевым крылом 1 посредством струи воздуха от воздушных винтов 6 эжектируется из окружающего пространства поток воздуха, обтекающего верхнюю поверхность кольцевого крыла 1. Этот поток создает дополнительную подъемную силу Y1 (рис. 6, а). Данный эффект снижает нагрузку на несущую поверхность аппарата в режиме взлета.
Парирование возмущающих моментов по тангажу (рис. 6, в) относительно оси OZ, по сигналам датчиков производится отклонением тягового кольца 7 с силовой установкой 5 посредством включения синхронизированных электроприводов вращения 10, расположенных внутри кольцевого крыла 1 (рис. 5). Приводы вращения 10 связаны с БСАУ и ручкой управления ЛА.
Парирование моментов по крену (рис. 6,б) относительно оси OX по сигналам датчиков производится поворотом тягового кольца 7 линейными электроприводами взаимопротивоположного действия с роторами 11 и статорами 12, расположенными внутри тягового кольца 7 (рис. 5). Они связанны с БСАУ и ручкой управления.
Парирование моментов по курсу (рис. 3) относительно оси OY производится путем дифференциального изменения общего шага винтов 6 (увеличивается общий шаг одного винта при одновременном уменьшении общего шага другого; таким образом, общая тяга системы остаётся постоянной, но возникает разность между реактивными моментами винтов).
При базировании на водоемах и взлете с водной поверхности (рис. 2) ЛА удерживается на плаву посредством убираемого в полете кольцевого поплавка 14. Тяговое кольцо 7 совместно с закрепленной в нем силовой установкой 5, содержащей соосные винты 6, установлено так, что плоскость вращения воздушных винтов 6 в кольце 7 параллельна водной поверхности. Центр тяжести аппарата при этом расположен на вертикальной оси аппарата OY.
Взлет с водной поверхности производится в автоматическом режиме. При вращении соосных воздушных винтов 6 в кольце 7 силовой установки 5 создается тяга P2. При достижении силы тяги P2, равной массе аппарата, он взлетает. Водоизмещающий поплавок 14 после взлета аппарата с воды телескопическими гидроцилиндрами 15 прижимается к нижней поверхности кольцевого крыла. В зазор между кольцом 7 и кольцевым крылом 1 посредством струи от воздушных винтов 6 эжектируется из окружающего пространства поток воздуха, обдувающий верхнюю поверхность кольцевого крыла 1. В результате возникает дополнительная подъемная сила Y1. Данный эффект снижает нагрузку на несущую поверхность аппарата в режиме взлета и зависания.
Переходной режим полета выполняется в автоматическом режиме полета по командам БСАУ. Данный режим заключается в вертикальном взлете и постепенном переходе к горизонтальному полету по некоторой траектории. Далее, разгоне ЛА до скорости, способной удерживать его в горизонтальном полете за счет аэродинамических сил Y, возникающих на кольцевом крыле 1. Разгон аппарата осуществляется за счет составляющей силы тяги P3 воздушных винтов 6, ось вращения которых отклоняется от вертикальной оси OY и постепенно приближается к горизонтальной оси OX.
Парирование возмущающих моментов при этом по тангажу относительно оси OZ производится отклонением тягового кольца 7 относительно оси OZ посредством приводов вращения 10 силовой установки 5, связанных с БСАУ.
Парирование возмущающих моментов по крену относительно оси OX осуществляется отклонением тягового кольца 7 относительно оси OX. Возмущающие моменты одновременно с вышеуказанными отклонениями тягового кольца 7 гасятся также путем дифференциального отклонения аэродинамических рулей 4 на стреловидных несущих поверхностях 3. С ростом скорости действие рулей 4 все более возрастает. При переходе летательного аппарата к горизонтальному полету поворот тягового кольца 7 относительно оси OZ постепенно приводит к тому, что плоскость вращения воздушных винтов 6 и соответственно тяговое кольцо 7 занимают вертикальное положение.
Центр тяжести аппарата (рис. 1) при этом занимает расчетное положение, характерное для диапазона центровок при горизонтальном полете.
В горизонтальном полете (рис. 1, 4) управление аппаратом по курсу заключается в повороте тягового кольца 7 на некоторые отличные от нуля углы вокруг оси OY. Поворот тягового кольца 7 осуществляется по сигналам датчиков линейными электроприводами взаимопротивоположного действия, в которые входят роторы 11 и статоры 12, расположенные внутри тягового кольца 7 (рис. 5). Они связанны с БСАУ и в автоматизированном режиме после перехода аппарата в горизонтальный полет обеспечивают управление по курсу ножными педалями управления.
Управление по крену и тангажу в горизонтальном полете осуществляются рулями 4 стреловидных несущих поверхностей 3 от командного органа – ручки управления, как и в обычном самолете.
Выводы
Таким образом, предлагаемая аэродинамическая компоновка летательного аппарата вертикального взлета и посадки – оснащенного круглым в плане аэродинамическим крылом, в котором выполнено круглое отверстие с установленной в нем с возможностью поворота силовой установкой с воздушными винтами, а также размещенным снизу круглого крыла эквидистантно его внутренней поверхности, выпускаемым при посадке круглым водоизмещающим поплавком – позволяет использовать данное техническое решение для нужд противолодочной авиации. Диапазон скоростей и дальность полета такого аппарата могут быть увеличены, а экипажу могут быть созданы условия для более длительной работы в комфортных условиях.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. ПРОТИВОЛОДОЧНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ // Современные наукоемкие технологии. 2013. № 12. С. 17-22;URL: https://top-technologies.ru/ru/article/view?id=33589 (дата обращения: 16.05.2026).