



Оценка условий для работы в зоне применения
Доставка огнегасящих жидкостей непосредственно в зону произошедших пожаров и катастроф является одной из самых сложных задач. Ее решение сопряжено с большим риском как для экипажей средств доставки, так и для самих средств, особенно когда пожары возникают в высотных зданиях или сооружениях. Для пожара, возникшего в высотном здании, одним из самых распространенных средств оперативной доставки огнегасящей жидкости является вертолет. Такая техника, как правило, оснащена открытыми несущим и хвостовым винтами, являющимися особо опасными, движущимися с большой скоростью агрегатами, соударение которых с окружающими предметами ведет к катастрофическим последствиям. Вертолет требует для обеспечения взлета-посадки площадь достаточных размеров и отсутствия на ней зданий, сооружений, деревьев и т.п.
Актуальность разработки
Альтернативой вертолетам могут стать летательные аппараты вертикального взлета и посадки (ЛАВВП), выполненные по схеме «воздушные винты в канале» или «воздушные винты в тяговом кольце».
В последние годы перспективы применения ЛАВВП подобных схем все более привлекают внимание как авиационных специалистов, так и специалистов по их использованию в различных силовых и гражданских структурах. Некоторые сомнения в возможных перспективах развития и применения такой техники, имевшие место в начальный период их разработки, в настоящее время рассеиваются в связи со значительными достижениями в таких областях, как аэродинамика, двигателестроение, конструкционные материалы, теория управления, микроэлектроника, информационно-вычислительные и управляющие системы.
Интерес к ЛАВВП нельзя назвать случайным. Они с не меньшим успехом, чем вертолеты, могут выполнять задачи связи, разведки, целеуказания, спасательных работ, перевозки людей, грузов и т.п., обладая при этом рядом существенных преимуществ:
• Относительная простота конструкции и дешевизна производства.
• Малые габариты и защищенные винты, вследствие чего очень мала вероятность их повреждения при взлете-посадке на ограниченные площадки, полетах над застроенными территориями на малыхвысотах, а также при полетах между верхушками деревьев.
• Удобство в обслуживании и транспортировке (удобство загрузки и выгрузки) и, что особенно важно, возможность десантированиятаких аппаратов с борта военно-транспортного самолета ивертолета.
• Значительно больший, чем у вертолета, ресурс агрегатов.
Сегодня к задачам военного применения ЛАВВП добавляются новые, в том числе такие как: ликвидация последствий аварий на взрывопожароопасных объектах, нефтегазопроводах, химически опасных объектах, зонах разрушения плотин гидроузлов, а также задачи ликвидации последствий землетрясений, цунами, наводнений, лесных пожаров, ураганов, тайфунов и т.п. Особенно эффективным ожидается использование данных аппаратов для обеспечения общественной безопасности при разрушении коммуникаций, энергоподающих сетей, автомобильных и железнодорожных магистралей. Обеспечение проведения антитеррористических, антинаркотических операций, а также специальных операций в интересах ФСБ, МВД, МЧС, спецподразделений Вооруженных сил и т.д. могут превратить аппараты такого типа в основной мобильный транспорт для выполнения спецзадач.
ЛАВВП, выполненные по схеме «воздушные винты в канале» или «воздушные винты в тяговом кольце», используют для создания вертикальной и горизонтальной скоростей полета работу винтов малого диаметра. Винты, как правило, помещаются в особого рода кольцах, основным назначением которых является получение дополнительной тяги, а также ограждение вращающихся винтов от соударения с посторонними предметами.
Конструктивная схема описываемого аппарата обеспечивает возможность его взлета-посадки на меньшие площадки и с меньшими требованиями к состоянию их поверхности. Выполнение аппарата в виде круглого монокрыла с вмонтированным в него подъемно-маршевыми агрегатом имеет меньшую вероятность повреждения аппарата при взлете-посадке, а также дает больше шансов на спасение экипажа при возникновении аварийной ситуации.
Аппарат имеет повышенную безопасность, надежность и эффективность в условиях турбулентной атмосферы. Он обладает необходимой управляемостью на всех режимах полета, а также широким диапазоном скоростей полета. Он имеет возможность зависать на высоте.
Благодаря своей оригинальной компоновке аппарат может десантироваться с борта самолета или вертолета в недоступные зоны проведения операций.
Двигательно-движительный и энергообеспечивающие комплексы аппарата сформированы таким образом, чтобы их воздействие на окружающую среду было минимальным.
Характерной особенностью такого аппарата является сосредоточение двигателей и движителей (соосных воздушных винтов) в одном блоке. Такое решение позволяет применять агрегат автономно в качестве подъемно-маршевого. При этом реактивные моменты от работы воздушных винтов с взаимно-противоположным вращением приводятся к нулевому значению, что позволяет отказаться от средств компенсации их реактивных моментов и повысить эффективность.
Силовые агрегаты аппаратов, выполненных по схеме «Соосные воздушные винты в канале» или «Соосные воздушные винты в тяговом кольце» обеспечивают на выходе незакрученный воздушный поток с уменьшенными потерями. Устраняется вероятность помпажа и ожидается рост КПД агрегата. Снижается по спектральному составу шум и повышается расчетная тяга при неизменной потребляемой мощности. Такие агрегаты позволяют сократить габариты и, следовательно, массу силовой установки.
С точки зрения перспективности создаваемых силовых агрегатов следует отметить их востребованность на рынке и наличие резервов для их дальнейшего усовершенствования на уровне патентоспособных технических решений. Научно-исследовательские и опытно-конструкторские работы, направленные на создание новых поколений таких силовых агрегатов, предопределяют патентоспособность будущих результатов исследований и их лицензионных возможностей.
Краткая характеристика задач по созданию аппарата
На реализацию задач по созданию такого аппарата должны быть направлены научно-исследовательские и опытно-конструкторские работы, которые отражают: создание аппарата с повышенной надежностью и безопасностью, сбалансированного по реактивным моментам его подъемно-маршевого агрегата. Кроме того, ставится задача создания аппарата, имеющего несущее кольцевое крыло, которое создает дополнительную подъемную силу на возможно малых скоростях, и во внутренней полости которого могла бы быть размещена огнегасящая жидкость. Должна быть предусмотрена установка подъемно-маршевого агрегата, кабины экипажа, энергоустановки, оборудования и аппаратуры управления, навигации и связи по вертикальной оси аппарата в промежутке кольцевого крыла.
Третьей задачей создания такого аппарата является придание необходимой плавучести и остойчивости при его базировании на водной поверхности и во время забора жидкости из водоема для тушения пожара.
Четвертой задачей является создание такого аппарата, который имел бы эффективные средства защиты двигательно-движительного комплекса от попадания в его агрегаты воды.
Пятой задачей является создание такого аппарата, который мог бы производить взлет-посадку на снег, лед, грунт, песок, водную и заболоченную поверхность и т.п.
Конструкция аппарата
В соответствии с задачами по созданию такого аппарата предлагается рассмотреть следующую концепцию «Противопожарный летательный аппарат для работы в городских условиях».
Летательный аппарат (рис. 1, рис. 2, рис. 3) имеет несущий корпус, выполненный из двух частей, и содержит: неподвижную профилированную кольцеобразную часть корпуса 1, подвижную профилированную кольцеобразную часть корпуса 2, служащую одновременно аэродинамическим крылом и водоизмещающим средством приводнения, концентричнорасположенную кабину экипажа 3, двигательно-движительный комплекс 4, выполненный по схеме «воздушные винты в канале» с соосными винтами противоположного вращения 5 и 6, обдувающими обтекаемую расходную емкость 7. Аппарат установлен на четырехопорное сухопутное шасси, содержащее амортизационные стойки 8, являющиеся одновременно направляющими и приводами, перемещающими подвижную часть несущего корпуса 2 относительно неподвижной части корпуса 1. Концентрично расположенная кабина экипажа 3 посредством пилонов 9 соединяет двигательно-движительный комплекс 4 с неподвижной профилированной кольцеобразной частью 1. На входе в диффузор неподвижной профилированной кольцеобразной части корпуса 1 летательного аппарата закреплено шарнирно управляемое аэродинамическое кольцо 10. При перемещении вдоль вертикальной оси аппарата подвижной профилированной кольцеобразной части корпуса 2 относительно неподвижной части корпуса 1 между ними образуется профилированный зазор 11.
Внутренняя полость подвижной профилированной кольцеобразной части корпуса 2 содержит герметическую емкость 12, снабженную клапанами впуска воды 13 и клапанами дренажа 14.
Обтекаемая расходная емкость 7 посредством пилонов с внутренними протоками 15 концентрично установлена в подвижной профилированной кольцеобразной части корпуса 2, образуя единый подвижный агрегат, способный заполняться жидкостью из водоема 17 и вести прицельный её сброс на очаг пожара.
В процессе управления аппаратом наклоны шарнирно управляемого аэродинамического кольца 10 производятся 4-мя сервоприводами 16, размещенными в амортизационных стойках 8. Сервоприводы функционально входят в систему ручного и автоматизированного управления аппаратом.
Неподвижная профилированная кольцеобразная часть 1 несущего корпуса имеет выпуклую верхнюю и вогнутую нижнюю поверхности и представляет собой, при удалении от неё подвижной части несущего корпуса 2, тяговый канал 11 со значительным радиусом кривизны его образующей. Такая форма канала при протекании в нем воздушной среды способствует возникновению на его поверхности разрежения, что дает весьма ощутимую прибавку тяги, создаваемой всем устройством при полете во взлетной конфигурации.
Подвижная профилированная кольцеобразная часть несущего корпуса 2 представляет собой аэродинамическое крыло, расположенное в одной плоскости, перпендикулярной центральной оси симметрии аппарата.
Параллельно плоскости профилированной кольцеобразной части несущего корпуса 2 располагается плоскость неподвижной профилированной кольцеобразной части 1 несущего корпуса, в которой расположены соосные винты 5 и 6, приводимые в противоположное вращение двигательно-движительным комплексом 4 и создающие поток воздушной среды. Этот воздушный поток, в свою очередь, выходя из сопла неподвижной профилированной кольцеобразной части 1 несущего корпуса, (рис. 2) направляется в центральное отверстие подвижной профилированной кольцеобразной части корпуса 2. При этом воздушной поток от винтов 5 и 6, назовем его «первичный», эжектирует из атмосферы воздух, назовем его «вторичный», который обтекает верхнюю поверхность подвижной профилированной кольцеобразной части корпуса 2, вызывая тем самым появление на ней дополнительной подъемной силы.
Одновременно с выполнением функций аэродинамического крыла, подвижная профилированная кольцеобразная часть 2 несущего корпуса выполняет роль водоизмещающего поплавка. Она обеспечивает удержание аппарата на плаву, его взлет и посадку.
Подвижная профилированная кольцеобразная часть корпуса 2 имеет также герметичные емкости 7, 12 и устройства 13, 14 для забора воды на плаву. Эти же устройства 13, 14 используются для быстрого освобождения емкостей 7, 12 от воды над зоной пожара или в экстренной ситуации.
Водозабор в герметичные емкости 7, 12 подвижной профилированной кольцеобразной части корпуса 2 осуществляется следующим образом.
При нахождении аппарата на плаву под действием его силы тяжести открываются впускные клапаны 13, и вода устремляется во внутренние полости емкостей 7, 12. Одновременно срабатывают дренажные клапаны 14, которые перепускают воздух, находящийся в емкостях 7, 12, либо в атмосферу, либо в специальный резервуар для повторного использования при выбросе воды. Заполнение емкостей 7, 12 производится до тех пор, пока не сработают датчики во всех емкостях, сигнализирующие о полном равномерном заполнении. Заполнение емкостей прекращается автоматически с выдачей контрольного сигнала на пульт управления системами аппарата.
Сброс огнегасящей жидкости производится по команде пилота аппарата с учетом координат очага пожара в ручном и автоматизированном режиме. После включения автомата «Сброс» жидкость перетекает равномерно по пилонам 15 из всех емкостей 12, попадая в обтекаемую расходную емкость 7. При этом система сброса имеет связь с системой автоматизированного управления аппаратом для предотвращения его колебаний и нежелательных эволюций, что повышает безопасность пилотирования аппарата.
Прицельный сброс жидкости на очаг пожара производится из расходной емкости 7 по прицельным данным видеокамер аппарата. Не исключается и сброс жидкости из всех емкостей 7, 12 одновременно. Сброс может быть дискретным и залповым в зависимости от характера пожара. В момент сброса жидкости может быть подключена пневматическая система «поддавливания», которая значительно ускоряет процесс.
Подвижная часть 2 несущего корпуса имеет двояковыпуклый профиль, причем ее верхняя поверхность, прилегающая к нижней поверхности неподвижной части 1, спрофилирована эквидистантно нижней поверхности неподвижной части.
В своем крайнем верхнем положении подвижная профилированная кольцеобразная часть корпуса 2 (рис. 1) прижата к нижней поверхности неподвижной части 1, образуя при этом единое кольцевое крыло, на котором возникают аэродинамические силы, обеспечивающие горизонтальный полет, при этом лобовое сопротивление минимально.
В своем крайнем нижнем положении подвижная профилированная кольцеобразная часть корпуса 2 (рис. 2) находится на удалении от неподвижной части 1, образуя при этом профилированную кольцевую щель 11, в которую эжектируется «вторичный воздух», вызывающий появление дополнительной подъемной силы на поверхности подвижной профилированной кольцеобразной части корпуса 2.
Таким образом, подъемная сила данного летательного аппарата во взлетно-посадочной конфигурации складывается (рис. 2) из подъемной силы (силы тяги) вентиляторов 5, 6, силы тяги неподвижной профилированной кольцеобразной части корпуса 1 и подъемной силы подвижной профилированной кольцеобразной части корпуса 2. При этом подъемная сила достигает максимального значения, а воздухозаборник аппарата значительно удален от поверхности воды.
Стабилизация в полете летательного аппарата обеспечивается гироскопическим влиянием соосных винтов противоположного вращения 5 и 6 на его конструкцию. Реактивный момент соосных винтов противоположного вращения 5 и 6 взаимно уравновешен.
Вертикальная скорость аппарата изменяется увеличением или уменьшением общего шага соосных винтов противоположного вращения 5 и 6.
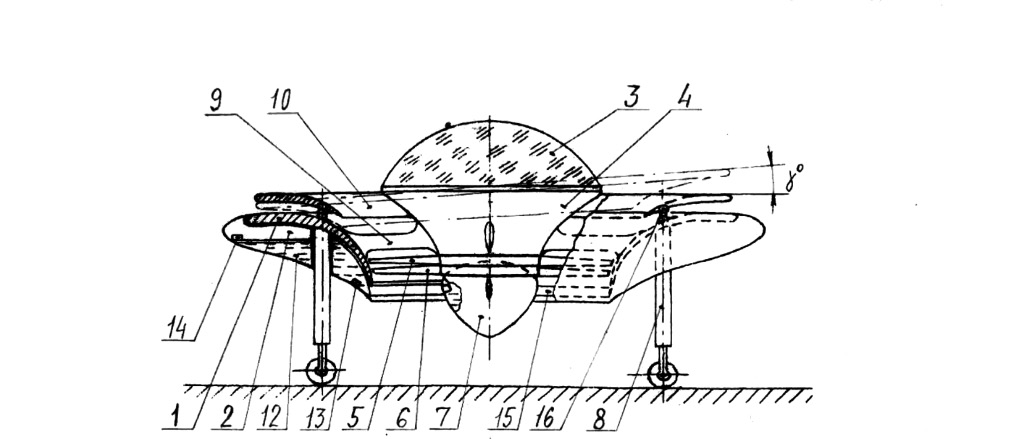
Рис. 1
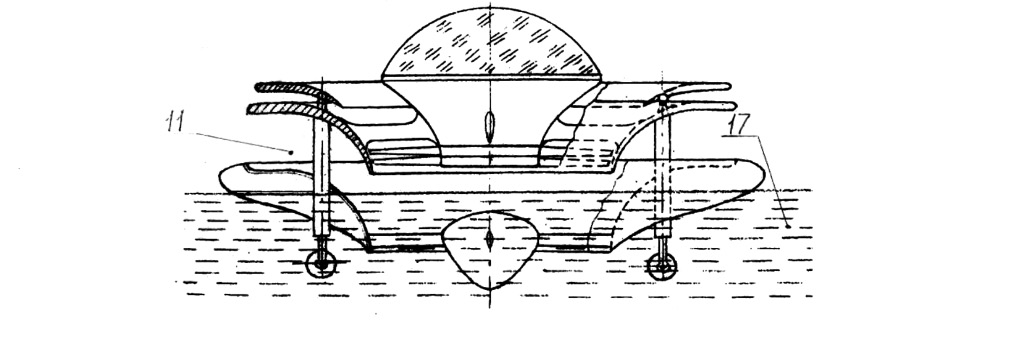
Рис. 2
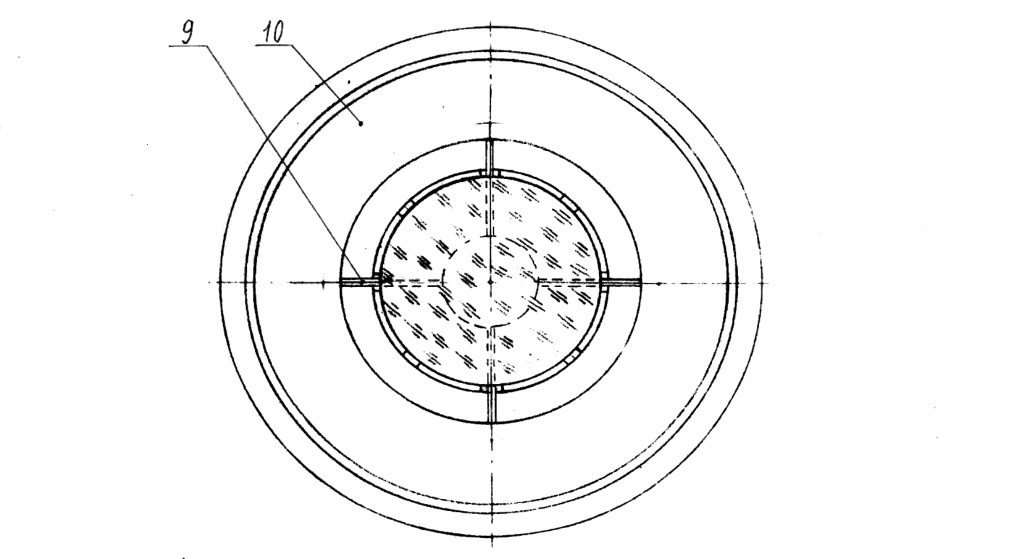
Рис. 3
Управление летательным аппаратом по тангажу и крену осуществляется путем наклона шарнирно закрепленного управляемого аэродинамического кольца 10. Наклон кольца 10 на определенный угол дает соответствующее значение аэродинамической силы, вызываемой потоком воздуха, засасываемого в диффузор аппарата. Аэродинамическая сила, возникающая на кольце 10, приложенная на плече от вертикальной оси аппарата, создает пропорциональный управляющий момент. В свою очередь, управляющие моменты по тангажу и крену, инициируемые посредством ручки управления пилотом летательного аппарата, вызывают наклон аппарата в нужную сторону, что и легло в основу принципа управления аппаратом.
Путевое управление, как и развороты на месте, обеспечивается посредством педалей ножного управления, воздействующих на механизм синхронизации оборотов соосных винтов противоположного вращения с целью их рассогласования и получения таким образом разницы моментов вращения, обеспечивающих поворот аппарата.
Выводы
Предлагаемая конструкция «Противопожарного летательного аппарата для работы в городских условиях» обеспечивает увеличение весовой эффективности аппарата, многократный точечный сброс огнегасящей жидкости в труднодоступные зоны пожара, в том числе возникшие в высотных зданиях, и имеет явно выраженные амфибийные свойства.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. ПРОТИВОПОЖАРНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ РАБОТЫ В ГОРОДСКИХ УСЛОВИЯХ // Современные наукоемкие технологии. 2013. № 10-1. С. 152-157;URL: https://top-technologies.ru/ru/article/view?id=33400 (дата обращения: 02.07.2026).