



Внимание, которое уделяет Правительство РФ социальным вопросам в последние годы обусловлено не только требованиям времени, но и требованием социальной справедливости для всех групп населения страны. Одной из самый социально обделенных групп населения являются инвалиды. В тоже время динамика роста инвалидов по годам следующая: 1990 – 4,338 млн. чел.; 2005-11,538 млн. чел.; 2011 – 13,209 млн. чел. При этом количество людей с нарушением опорно-двигательного аппарата составляет 4,5 % от общего количества инвалидов. Это граждане нашего государства, которые и могут успешно трудиться в определённых областях народного хозяйства, но , в стране отсутствует необходимая инфраструктура для инвалидов. Если в последнее время появились пандусы в общественных местах, туалеты и другая атрибутика этой среды, то места проживания инвалидов совершенно не приспособлены и не стимулируют активный образ жизни последних. Основным препятствием для активного образа жизни инвалидов в колясках являются лестничные марши в многоэтажных домах. Имеющиеся в настоящее время устройства или стационарны или очень дороги. Поэтому целью данной работы является разработка недорогого, мобильного устройства для подъёма и опускания инвалида в коляске по стандартным лестничным маршам. Принципиальная схема устройства представлена на рис. 1
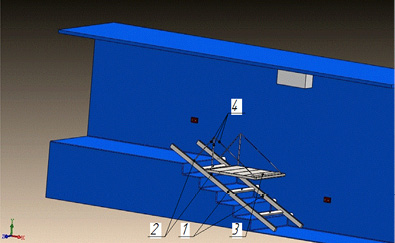
Рис. 1. Принципиальная схема устройства для подъёма и опускания инвалида в коляске по лестничному маршу
Устройство состоит из двух направляющих труб 1, внутри которых перемещаются ролики 2 движущейся платформы 3. Платформа 3 связана с направляющей системой раскосов 4. Спуск и подъём платформы осуществляется посредством мини лебёдки с электроприводом. В качестве привода в лебедке используется червячный самотормозящийся редуктор, который исключает самопроизвольный спуск платформы. Подъём и опускание платформы производится посредством троса от лебедки и системы блоков. Управление спуском и подъёмом платформы осуществляется инвалидом с помощью кнопок расположенных, на площадках. Для фиксации платформы в верхнем и нижнем положениях предусмотрены конечные выключатели.
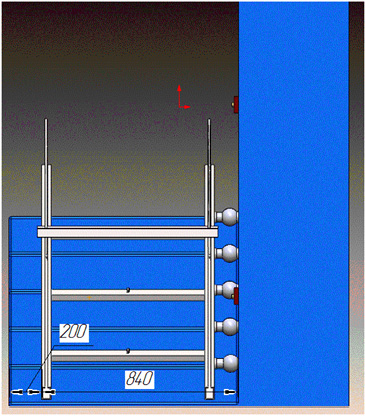
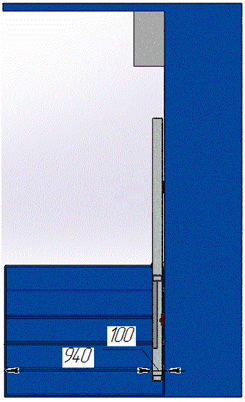
Мобильность устройства заключается в том, что после использования устройства, последнее с помощью той же лебедки поднимается в вертикальное положение, освобождая (частично) ширину лестничного марша (рис. 2)
Размеры платформы, вес инвалида в коляске, высота порога при разработке устройства приняты в соответствии с ГОСТ Р 51090-97.
Положение 1 Положение 2
Рис. 2. Устройство: положение 1 – в рабочем состоянии; положение 2 – в состоянии хранения
Библиографическая ссылка
Петров А.А., Боровских В.Е. Принципиальная схема устройства для подъёма и опускания инвалида в коляске по лестничному маршу // Современные наукоемкие технологии. 2013. № 8-1. С. 58-59;URL: https://top-technologies.ru/ru/article/view?id=32429 (дата обращения: 01.08.2026).