



Подробно остановимся на третьем семействе механизмов. Согласно классификации [1, с. 7-15] в третьем семействе механизмы могут существовать в шести различных пространствах, которые схематично изображены на рис. 1.
Четырехзвенные механизмы с двухпарными звеньями определяются условиями n=3, τ=2 (двухпарные звенья), Wm=1, и как следствие необходимостью использовать четыре кинематических пары p=4. С учетом заданных условий только при использовании всех пар V класса структурная формула принимает значение Wm = 3n – 2p5 = 3·3 – 2·4 = 1.
Отсюда следует вывод, что для реализации рассматриваемых механизмов необходимо использование пар только V класса.
Пространство ВВВ позволяет создавать сферические механизмы. Характерным примером с точки зрения состава кинематических пар может служить сферический четырехзвенный шарнирный механизм, изображенный на рис. 2. Оси всех цилиндрических шарниров A, B, C, D пересекаются в одной точке М, поэтому скольжение звеньев вдоль осей исключено.
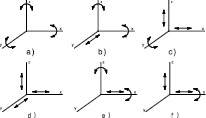
Рис. 1. Пространства третьего семейства: a – ВВВ, b – ПВВ, c – ППВ, d – ППП, e – ВПВ, f – ВПП
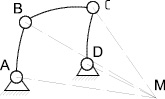
Рис. 2. Сферический пространственный четырехзвенный механизм
Далее рассмотрим пространство ПВВ. Для данного пространства характерно то, что для передачи движения ВВ в обозначенных пространством плоскостях необходимо использовать коническую зубчатую передачу. Зубья колес при касании по образующей боковой поверхности образуют пару IV класса, значит, в пространстве ПВВ не существуют четырехзвенные механизмы второго вида.
Следующее пространство ППВ характеризует собой плоские механизмы. Существует семь различных схем реализации плоских четырехзвенных механизмов второго вида, которые схематично представлены ниже на рис. 3 – а) ВВВВ, b) ВВВП, c) ВВПВ d) ВППВ e) ПВВП f) ППВВ g) ВПВП. Буквами A, B, C и D обозначены кинематические пары.
Рассмотрим следующее пространство механизмов ППП. Здесь существует возможность создания пространственных клиновых механизмов. Характерным примером с точки зрения состава кинематических пар может служить пространственный четырехзвенный механизм с одними поступательными парами, изображенный на рис. 4.
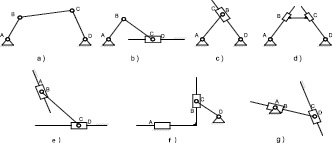
Рис. 3. Плоские четырехзвенные механизмы второго вида
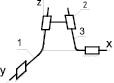
Рис. 4. Пространственный четырехзвенный механизм с одними поступательными парами
Механизм позволяет производить поступательные движения ведущего звена 1 и ведомого звена 3 вдоль произвольно расположенных в пространстве осей, в данном случае перпендикулярно расположенных осей X и Y.
В пространствах ВПВ и ВПП рассматриваемых механизмов не обнаружено.
Подводя итоги проведенной работы, следует вывод о том, что рассматриваемые механизмы существуют в трех пространствах третьего семейства ВВВ, ППП и ППВ.
В пространстве ВВВ – последовательность ВВВВ, в пространстве ППП – последовательность ПППП, и в пространстве ППВ – семь возможных комбинаций ВВВВ, ВППВ, ВВВП, ВПВВ, ПВВП, ПВПВ и ППВВ.
Библиографическая ссылка
Колобовникова И.Н., Яскевич О.М., Дворников Л.Т. О существовании четырехзвенных механизмов с двухпарными звеньями в третьем семействе // Современные наукоемкие технологии. 2013. № 8-2. С. 264-265;URL: https://top-technologies.ru/ru/article/view?id=32188 (дата обращения: 29.06.2026).