



Исследование нагрузочных способностей, качественных характеристик проектируемого рычажного механизма VI класса с регулируемой циклограммой выходного звена, представленного на рис. 1, неразрывно связано с определением аналогов скоростей и ускорений, а также направлений векторов скоростей в характерных точках механизма.
Нами предложен комбинированный метод кинематического анализа, заключающегося в том, что положения звеньев механизма и координаты кинематических пар определяются численным методом, а скорости и ускорения аналитически на основе уравнений связи. При таком подходе повышается точность расчетов, поскольку использование только численного метода обеспечивает накопленную погрешность не только положений, но скоростей и ускорений.

Рис. 1
Уравнения связи для аналогов скоростей имеют вид:







Механизм IV класса

 (1)
(1)


Для аналогов ускорений:










 (2)
(2)


Здесь
xEB=xE –xB; yEB=yE –yB; xEG=xE –xG; yEG=yE –yG; xGH=xG –xH; yGH=yG –yH; xGF=xG –xF; yGF=yG –yF;
xCD=xC –xD;yCD=yC –yD; xFK=xF –xK;yFK=yF –yK; xKC=xK –xC;yKC=yK –yC; xLC=xL–xC;yLC=yL –yC; xFE=xF –xE; yFE=yF –yE; xLG=xL–xG; yLG=yL –yG; xLK=xL–xK; yLK=yL –yK .
В целях сокращения числа неизвестных выразим  через
через  , используя соотношения
, используя соотношения
 ,
,  ,
,
где
 ,
, . (3)
. (3)
Выразим  через
через  и
и  как
как

и  ,
,
где  ,
,  . (4)
. (4)
Выразим  через
через  и
и  как
как

и  ,
,
где  ,
,  . (5)
. (5)
При нахождении аналогов скоростей и ускорений учтем, что  ,
,  ,
,  ,
,  , тогда правые части первых уравнений систем (1) и (2) можно соответственно представить в виде
, тогда правые части первых уравнений систем (1) и (2) можно соответственно представить в виде
с1=yEB × xB – xEB · yB, c2=–(yEB × yB + xEB · xB). (6)
Опуская промежуточные выкладки и учитывая (3-6), получим:
det ; det
; det ;
;
det ,
,
где  ;
;
 ;
;  ;
;  ;
;  ;
;  ;
;
 ;
;
 ;
; 
 ;
;  ;
;
 ;
;  ;
;

 ;
;  ;
;
 .
.
Определим проекции векторов аналогов скоростей в кинематических парах:
 ;
;
 ;
;
 ;
;  ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;  ;
;  ;
;  ,
,
где  ;
;
 ;
;
 ;
;
 ;
;  ;
;

 ;
;
 ;
;
 .
.
Аналог угловой скорости звена с найдем по формуле  .
.
Для определения аналогов ускорений предварительно вычислим переменные коэффициенты:
 ;
; 
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;  ;
;  ;
;
 ;
; 
 ;
;  ;
;  ;
;
 .
.
Аналоги ускорений определятся из выражений:
 ;
; ;
;  ;
;
 ;
;  ;
;  ;
; 
 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
; ;
;  .
.
Тогда формула для вычисления аналога углового ускорения будет иметь вид:
 .
.
Поставленная задача получению аналитических зависимостей аналогов скоростей и ускорений рычажного механизма IV класса выполнена полностью.
Построенные по результатам расчета диаграммы, представленные на рис. 2, полностью отражают характер изменения кинематических параметров рычажного механизма IV класса с выстоем выходного звена.
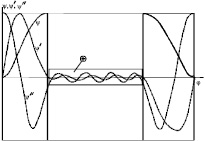
Рис.2. График перемещения, аналог скорости и ускорения выходного звена с увеличенным фрагментом скоростей и ускорений на участке выстоя
Библиографическая ссылка
Сахабутдинова Г.Ф. КОМБИНИРОВАННЫЙ МЕТОД КИНЕМАТИЧЕСКОГО АНАЛИЗА РЫЧАЖНЫХ МЕХАНИЗМОВ IV КЛАССА С РЕГУЛИРУЕМОЙ ЦИКЛОГРАММОЙ И ВЫСТОЕМ ВЫХОДНОГО ЗВЕНА // Современные наукоемкие технологии. 2013. № 8-2. С. 241-243;URL: https://top-technologies.ru/ru/article/view?id=32126 (дата обращения: 29.06.2026).