



Расчет рамы нами выполнен с помощью проектно-вычислительного комплекса SCAD. Комплекс реализует конечно-элементное моделирование статических и динамических расчетных схем, проверку устойчивости, выбор невыгодных сочетаний усилий, подбор арматуры железобетонных конструкций, проверку несущей способности стальных конструкций. В представленной ниже пояснительной записке описаны лишь фактически использованные при расчетах названного объекта возможности комплекса SCAD.
В основу расчета положен метод конечных элементов, с использованием в качестве основных неизвестных перемещений и поворотов узлов расчетной схемы. В связи с этим, идеализация конструкции выполнена в форме, приспособленной к использованию этого метода, а именно: система представлена в виде набора тел стандартного типа (стержней, пластин, оболочек и т.д.), называемых конечными элементами и присоединенных к узлам.
Тип конечного элемента определяется его геометрической формой, правилами, определяющими зависимость между перемещениями узлов конечного элемента и узлов системы, физическим законом, определяющим зависимость между внутренними усилиями и внутренними перемещениями, и набором параметров (жесткостей), входящих в описание этого закона и др.
Узел в расчетной схеме метода перемещений представляется в виде абсолютно жесткого тела, бесконечно малых размеров. Положение узла в пространстве при деформациях системы определяется координатами центра и углами поворота трех осей, жестко связанных с узлом. Узел представлен как объект, обладающий шестью степенями свободы – тремя линейными смещениями и тремя углами поворота.
Все узлы и элементы расчетной схемы нумеруются. Номера, присвоенные им, следует трактовать только как имена, которые позволяют делать необходимые ссылки.
Основная система метода перемещений выбирается путем наложения в каждом узле всех связей, запрещающих любые узловые перемещения. Условия равенства нулю усилий в этих связях представляют собой разрешающие уравнения равновесия, а смещения указанных связей – основные неизвестные метода перемещений.
В общем случае в пространственных конструкциях в узле могут присутствовать все шесть перемещений:
1 – линейное перемещение вдоль оси X;
2 – линейное перемещение вдоль оси Y;
3 – линейное перемещение вдоль оси Z;
4 – угол поворота с вектором вдоль оси X (поворот вокруг оси X);
5 – угол поворота с вектором вдоль оси Y (поворот вокруг оси Y);
6 – угол поворота с вектором вдоль оси Z (поворот вокруг оси Z).
Нумерация перемещений в узле (степеней свободы), представленная выше, используется далее всюду без специальных оговорок, а также используются соответственно обозначения X, Y, Z, UX, UY и UZ для обозначения величин соответствующих линейных перемещений и углов поворота.
В соответствии с идеологией метода конечных элементов, истинная форма поля перемещений внутри элемента (за исключением элементов стержневого типа) приближенно представлена различными упрощенными зависимостями. При этом погрешность в определении напряжений и деформаций имеет порядок (h/L)k, где h – максимальный шаг сетки; L – характерный размер области. Скорость уменьшения ошибки приближенного результата (скорость сходимости) определяется показателем степени k, который имеет разное значение для перемещений и различных компонент внутренних усилий (напряжений).
Расчетная схема
Системы координат. Для задания данных о расчетной схеме могут быть использованы различные системы координат, которые в дальнейшем преобразуются в декартовы. В дальнейшем для описания расчетной схемы используются следующие декартовы системы координат:
– глобальная правосторонняя система координат XYZ, связанная с расчетной схемой;
– локальные правосторонние системы координат, связанные с каждым конечным элементом.
Тип схемы. Расчетная схема определена как система с признаком 5. Это означает, что рассматривается система общего вида, деформации которой и ее основные неизвестные представлены линейными перемещениями узловых точек вдоль осей X, Y, Z и поворотами вокруг этих осей.
Количественные характеристики расчетной схемы
Расчетная схема характеризуется следующими параметрами:
Количество узлов – 76.
Количество конечных элементов – 86.
Общее количество неизвестных перемещений и поворотов – 456.
Количество загружений – 1.
Количество комбинаций загружений – 14.
Выбранный режим кинето-статического расчета. Статический расчет системы выполнен в линейной постановке.
Набор исходных данных. Детальное описание расчетной схемы содержится в документе «Исходные данные», где в табличной форме представлены сведения о расчетной схеме, содержащие координаты всех узлов, характеристики всех конечных элементов, условия примыкания конечных элементов к узлам и др.
Граничные условия. Возможные перемещения узлов конечно-элементной расчетной схемы ограничены внешними связями, запрещающими некоторые из этих перемещений. Наличие таких связей помечено в таблице «Координаты и связи» описания исходных данных символом #.
Условия примыкания элементов к узлам. Точки примыкания конечного элемента к узлам (концевые сечения элементов) имеют одинаковые перемещения с указанными узлами.
Исключение составляют стержневые элементы, для которых предусмотрено наличие шарниров и/или ползунов, разрешающих угловые и/или линейные перемещения узлов и концевых сечений элементов относительно узлов расчетной схемы. Описание шарниров и ползунов приведено в таблице «Условия примыкания».
Характеристики использованных типов конечных элементов
В расчетную схему включены конечные элементы следующих типов. Стержневые конечные элементы, для которых предусмотрена работа по обычным правилам сопротивления материалов. Описание их напряженного состояния связано с местной системой координат, у которой ось X1 ориентирована вдоль стержня, а оси Y1 и Z1 – вдоль главных осей инерции поперечного сечения.
Некоторые стержни присоединены к узлам через абсолютно жесткие вставки, с помощью которых учитываются эксцентриситеты узловых примыканий. Тогда ось X1 ориентирована вдоль упругой части стержня, а оси Y1 и Z1 – вдоль главных осей инерции поперечного сечения упругой части стержня.
К стержневым конечным элементам рассматриваемой расчетной схемы относятся следующие типы элементов: элемент типа 5, который работает по пространственной схеме и воспринимает продольную силу N, изгибающие моменты My и Mz, поперечные силы Qz и Qy, а также крутящий момент Mk.
Результаты расчета
В настоящем отчете результаты расчета представлены выборочно. Вся полученная в результате расчета информация хранится в электронном виде.
Перемещения. Вычисленные значения линейных перемещений и поворотов узлов от загружений представлены в таблице результатов расчета «Перемещения узлов».
Правило знаков для перемещений принято таким, что линейные перемещения положительны, если они направлены в сторону возрастания соответствующей координаты, а углы поворота положительны, если они соответствуют правилу правого винта (при взгляде от конца соответствующей оси к ее началу движение происходит против часовой стрелки).
Усилия и напряжения. Вычисленные значения усилий и напряжений в элементах от загружений представлены в таблице результатов расчета «Усилия/напряжения элементов».
Для стержневых элементов усилия по умолчанию выводятся в концевых сечениях упругой части (начальном и конечном) и в центре упругой части, а при наличии запроса пользователя и в промежуточных сечениях по длине упругой части стержня. Для пластинчатых, объемных, осесимметричных и оболочечных элементов напряжения выводятся в центре тяжести элемента и при наличии запроса пользователя в узлах элемента.
Правило знаков для усилий (напряжений). Правила знаков для усилий (напряжений) приняты следующими:
1) для стержневых элементов возможно наличие следующих усилий:
N – продольная сила;
МКР – крутящий момент;
MY – изгибающий момент с вектором вдоль оси Y1;
QZ – перерезывающая сила в направлении оси Z1, соответствующая моменту MY;
MZ – изгибающий момент относительно оси Z1;
QY – перерезывающая сила в направлении оси Y1, соответствующая моменту MZ;
RZ – отпор упругого основания;
2) положительные направления усилий в стержнях приняты следующими:
– для перерезывающих сил QZ и QY – по направлениям соответствующих осей Zl и Yl;
– для моментов MX, MY, MZ – против часовой стрелки, если смотреть с конца соответствующей оси X1, Y1, Z1;
– положительная продольная сила N всегда растягивает стержень.
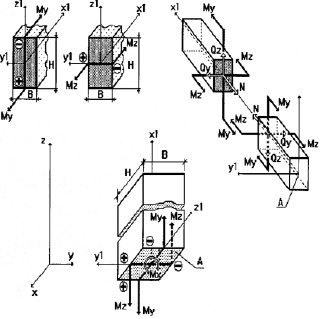
На рисунке показаны положительные направления внутренних усилий и моментов в сечении горизонтальных и наклонных (а), а также вертикальных (б) стержней.
Знаком «+» помечены растянутые, а знаком «–» – сжатые волокна поперечного сечения от воздействия положительных моментов Му и Мz.
Суммарные значения приложенных нагрузок по нагружениям.
В протоколе решения задачи и эпюрах для каждого из нагружений даны значения суммарной узловой нагрузки, действующей на систему.
Библиографическая ссылка
Анутов Р.М., Котельников В.Я., Козявин А.А., Котельников А.В., Тищенко Д.Е. РАСЧЕТ РАМ КОМБИНИРОВАННЫХ МАШИН НА ЭВМ // Современные наукоемкие технологии. 2013. № 3. С. 11-13;URL: https://top-technologies.ru/ru/article/view?id=31496 (дата обращения: 24.07.2026).