



Технологический процесс обработки пласта пальцем сепаратора выполняется при переменных углах и глубине его хода. В связи с этим важно знать значения углов наклона пальца к горизонту на различных участках траектории движения его в почве. При кинематическом анализе работы пальца установлены три основные фазы рыхления и сепарации почвы.
Первая фаза – вход пальца в почву. Она определяется острым углом начала погружения пальца и движением частиц и сорняков вверх по его рабочей поверхности. Основное назначение этого угла – обеспечивать заглубление диска в почву и сепарацию ее вместе с сорняками.
Вторая фаза характеризует максимальное заглубление пальца в почву. На этом участке определяющим показателем технологии является предельный угол наклона пальца к горизонту, а также направление равнодействующей силы к поверхности поля и траектории линии резания.
Третья фаза соответствует выглублению пальца из почвы. Здесь происходит уменьшение глубины обработки пласта, очистка пальца от почвы и сорняков и завершается его рабочий цикл.
Общий случай движения пальца в почве можно рассматривать как работу клина с переменным углом δ1, δ, δ2 (рис. 1). Угол наклона принимает три положения. В принятой схеме почва характеризуется углом скалывания θ, который по теории предельного равновесия для данного типа почвы изменяется в заданных пределах. Равнодействующая сила R отклонена от нормали к пальцу на угол φ трения. На схеме (а) угол наклона выбран таким, что равнодействующая сила направлена выше линии предельного угла θ скалывания почв 9 пунктирная линия). В этом случае крупные фракции почвы активно перемещаются вверх по пальцу и сепарируются вместе с сорняками на поверхность. По мере увеличения угла δ (рис. 1, б) направление вектора приближается к линии предельного угла скалывания соответствует предельное значение угла наклона, когда сумма проекций сил на вертикальную ось равна нулю:
ΣFy = 0.
Дальнейшее увеличение угла δ2 наклона пальца (рис. 1, в), переводит направление вектора равнодействующей за линию предельного угла и при некотором значении угла δ совмещается с ней. Этому положению угла скалывания почвы соответствует вертикальная составляющая сила, которая выталкивает из почвы диск, а сумма проекций сил – положительная и направлена вверх.
Изменения угла наклона в пределах от δ1 до δ2 существенно влияют на характер возникающих напряжений в зоне разрушения почвы. Так, в положении пальца (а) превалируют напряжения растяжения и сдвига, в то время как положению пальца (в) соответствуют напряжения сжатия и сдвига.
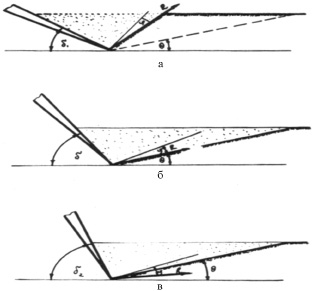
Рис. 1. К определению угла наклона пальца в точке максимального заглубления пальца
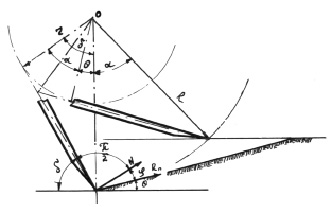
Рис. 2. К определению рационального соотношения между углом установки пальца и передаточным числом тормозного ротора
Таким образом, если вектор равнодействующей совпадает с направлением линии скалывания почвы, а конец пальца перемещается по этой линии или несколько выше ее, то он не разрушает слой почвы, лежащий, ниже линии скалывания. В этом случае достигается максимальная глубина хода пальца, устойчивость его работы на участке выхода из почвы, меньше расходуется энергии на разрушение уже сдвинутого пласта. Следовательно, рациональный угол необходимо выбрать с учетом траектории движения конца пальца, определяемой кинематическими параметрами тормоза и дисков. Точка максимального заглубления пальца и рациональный угол его наклона позволяют установить геометрические соотношения между диском и пальцем. В зоне максимальной глубины хода рациональный угол равен:

или

Здесь φ – угол трения почвы о металл; θ – угол сдвига почвы, в пределе он равен:

где f* – угол трения почвы о почву.
Тогда для каждой фазы положения пальца в почве определим углы δ1, δ, δ2
1-ая фаза:

Она характеризует начало заглубления пальца в почву.
2-я фаза:

при которой сумма проекций сил на ординату равна нулю, а палец проходит через точку hmax.
3-я фаза:

Соответствует выходу пальца из почвы и завершению цикла его работы. Одновременно с выходом, происходит очистка пальца от почвы, сорняков и растительных остатков.
Для определения взаимосвязи угла с передаточным числом I тормоза совместим касательную к траектории движения с линией скалывания почвы:
 (1)
(1)
Левая часть уравнения (1) является касательной к траектории движения конца пальца:

Заменяя α′ через половинные углы, запишем:
Экстремальное значение угла  и соответствующее ему передаточное число I определим, приравнивая производную к нулю:
и соответствующее ему передаточное число I определим, приравнивая производную к нулю:

Делая замену:
K(i + 1) = 0;
K(I – 1) = c;

получаем:
αx2 – 2x + c = 0.
Откуда:
Наибольшее значение тангенса угла получаем ,если числитель подкоренного выражения равнее нулю:

или

Тогда

Если
K = tgθ, (2)
то справедливо:
 (3)
(3)
Из уравнения (2) определим угол θ, получаем:

или

Тогда рациональный угол δ наклона пальца в точке максимального заглубления будет равен:

Для определения углов δ необходимо знать зависимость угла скалывания почвы от передаточного числа и угол трения почвы по рабочей поверхности. В таблице приведены значенияθ = f(i).
Соотношения углов скалывания почвы и передаточного числа тормоза
|
Угол скалывания почвы, °θ |
10 |
20 |
30 |
35 |
40 |
50 |
60 |
70 |
80 |
90 |
|
Передаточное число тормоза, i |
5,76 |
2,92 |
2,02 |
1,75 |
1,55 |
1,3 |
1,15 |
1,06 |
1,01 |
1 |
Аналитическое определение углов скалывания по параметрам кинематического режима ротора, позволяют вытирать рациональные значения углов установки пальца ротора.
Выводы
Установлена зависимость кинематического режима торможения от физико-механических свойств почвы, и выбраны соответствующие передаточные значения рабочего органа привода ротора культиватора.
Библиографическая ссылка
Анутов Р.М., Котельников В.Я., Козявин А.А., Котельников А.В., Тищенко Д.Е. АЦИОНАЛЬНЫЕ СООТНОШЕНИЯ МЕЖДУ УГЛОМ УСТАНОВКИ ПАЛЬЦА СЕПАРАТОРА И ПЕРЕДАТОЧНЫМ ЧИСЛОМ ТОРМОЗА СКОРОСТНОГО УНИВЕРСАЛЬНОГО КУЛЬТИВАТОРА // Современные наукоемкие технологии. 2012. № 11. С. 18-21;URL: https://top-technologies.ru/ru/article/view?id=31094 (дата обращения: 29.06.2026).