



Обеспечение оптимальной - наилучшей в некотором смысле - работы объекта регулирования процессов транспортирования нефтегазоводяной смеси (НГВС) становится в настоящее время одной из центральных задач автоматизации. Работа объекта может считаться оптимальной при максимальном коэффициенте полезного действия, минимальной себестоимости единицы продукции, минимальной затрате энергии на выработку единицы продукции и т.д.
В отличие от протяженных магистральных нефтепроводов на промысловых нефтепроводах, обладающих ограниченной протяженностью и незначительным изменением перепада давления по длине нефтепровода, может быть применена система экстремального регулирования (СЭР), обеспечивающая максимальное использование мощности насосной станции.
Обычная система автоматического регулирования (САР) не может решить задачу оптимизации[1, 2]. Это происходит потому, что в обычной САР всегда известно заданное значение регулируемого параметра и, следовательно, всегда известно, в каком направлении необходимо изменять регулирующее воздействие, чтобы ликвидировать ошибку системы: разность между заданным и текущим значением регулируемого параметра.
В отличие от обычных САР, в СЭР не известно заданное значение регулируемого параметра. Поэтому задача СЭР принципиально сложнее и заключается в автоматическом поиске такого значения регулирующего воздействия, которое обеспечивает максимум (минимум) регулируемой величины. В отличие от обычных систем автоматического регулирования в СЭР анализ состояния объекта в данный момент времени не позволяет определить, в каком направлении следует изменять управляющее воздействие, чтобы получить требуемый результат.
Задача, решаемая СЭР, относится к объекту, имеющему статическую характеристику y = f(x) (рис. 1).
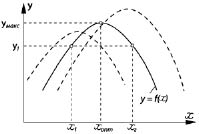
Рис. 1. Объект регулирования
Входная величина объекта x, а выходная - y, которую требуется поддерживать максимальной.
Положение и форма кривой y = f(x) под влиянием возмущения изменяется (пунктирные кривые на рис. 1) и в данный момент положение экстремума не известно. Поэтому в СЭР непрерывно должен осуществляться поиск экстремального значения y.
Основной процесс в СЭР - это автоматический непрерывный поиск, заключающийся в изменении входа объекта, анализе результатов этого воздействия и определении дальнейшего направления изменения входа системы с целью достижения экстремума выхода объекта.
Задача СЭР состоит в автоматическом поиске такого значения регулируемого параметра, о котором заранее известны только признаки, отличающие это значение от остальных: либо это максимальное, либо минимальное из всех возможных значений.
Системы экстремального регулирования делятся по принципу, используемому для определения направления движения к экстремуму на систему:
1. Системы с запоминанием экстремума, реагирующие на разность между наибольшим достигнутым в предыдущие моменты времени значением выхода и текущим значением выхода y.
2. Системы, реагирующие на знак или величину, производной dy/dx или dy/dt.
3. Системы со вспомогательной модуляцией, которые определяют направление движения к экстремуму по сдвигу фазы между входными и выходными колебаниями объекта.
4. Системы шагового типа, реагирующие на знак приращений выхода y.
По характеру воздействия исполнительного механизма (ИМ) на объект СЭР могут быть непрерывного или дискретного действия. В системах непрерывного действия при работе регулятора исполнительный механизм непрерывно изменяет вход x объекта. В дискретных СЭР исполнительный механизм изменяет вход объекта через определенные промежутки времени. Существуют СЭР смешанного типа, соединяющие в себе свойства различных систем приведенной выше классификации.
СЭР с запоминанием экстремума
В экстремальных регуляторах с запоминанием экстремума на сигнум-реле подается разность между текущим значением выхода у объекта и его значением в предыдущий момент времени.
Структурная схема СЭР с запоминанием экстремума представлена на рис. 2. Выходная величина объекта O со статистической характеристикой y = f(t) подается на запоминающее устройство ЗУ экстремального регулятора. Запоминающее устройство такой системы должно фиксировать y только при его увеличении. На уменьшение y запоминающее устройство не реагирует. Сигнал с запоминающего устройства подается на элемент сравнения ЭС, где сравнивается с текущим значением сигнал y. Сигнал разности y - yмакс с элемента сравнения поступает на сигнум-реле СР. Когда разность y - yмакс достигает значения зоны нечувствительности у сигнум-реле, оно производит реверс исполнительного механизма ИМ, с постоянной скоростью перемещения, т.е. dx/dt = ± k1 (где k1 = const). Рис. 3 поясняет работу СЭР с запоминанием экстремума. В СЭР с запоминанием экстремума запоминающее устройство не фиксирует экстремум статической характеристики объекта (его значение не известно в момент включения регулятора в работу). Запоминающее устройство фиксирует значения выходной величины у объекта, когда y увеличивается.
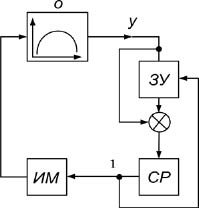
Рис. 2. Структурная схема СЭР с запоминанием экстремума
Из описания функционирования СЭР, основанных на принципе запоминания экстремума, следует, что в них не требуется вычисление производных, а регулятор действует или по отклонению от экстремума или по интегралу от этих отклонений. В силу этого такие СЭР отличаются простотой конструкции и помехоустойчивостью.
СЭР с измерением производной
Системы экстремального регулирования с измерением производной используют то свойство экстремальной статической характеристики, что производная dy/dx равна нулю при значении входа объекта x = xопт.
Структурная схема такой СЭР приведена на рис. 4. Значения входа и выхода объекта О подаются на два дифференциатора D1 и D2, на выходе которых получаются сигналы, соответственно dx/dt и dy/dt. Сигналы производных поступают на делительное устройство ДУ. На выходе ДУ получается сигнал dy/dx, который подается на усилитель У с коэффициентом усиления k2. Сигнал с выхода усилителя поступает на исполнительный механизм ИМ с переменной скоростью перемещения, величина которой пропорциональна выходному сигналу усилителя u. Коэффициент усиления ИМ равен k1.
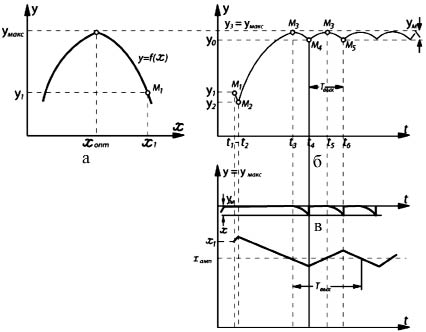
Рис. 3. Поиск экстремума экстремуму СЭР с запоминанием экстремума

Рис. 4. Структурная схема СЭР
с измерением производной
Система с измерением производной обладает рядом недостатков, которые делают ее практически малоприменимой. При dx/dt → 0 производная dy/dt также стремится к нулю, задача отыскания экстремума становится неопределенной. Все реальные объекты обладают инерцией, поэтому необходимо делить друг на друга не одновременно замеренные производные dy/dt и dx/dt, а сдвинутые по времени на величину задержки сигнала в объекте, что выполнить достаточно сложно. Отсутствие в такой СЭР логического устройства приводит к тому, что в некоторых условиях система теряет работоспособность.
СЭР со вспомогательной модуляцией
В СЭР с вспомогательной модуляцией используется свойство статической характеристики изменять фазу колебаний на выходе объекта по сравнению с фазой входных колебаний объекта, при переходе выхода объекта через экстремум. Это системы с непрерывным поисковым сигналом, т.е непрерывные СЭР (рис. 5).
В отличие от рассмотренных выше СЭР, системы с вспомогательной модуляцией имеют раздельные поисковые и рабочие движения.
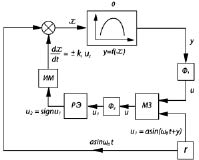
Рис. 5. СЭР со вспомогательной модуляцией
(Ф1 - фильтр; Ф2 - низкочастотный фильтр; РЭ - релейный элемент; МЗ -множительное звено; ИМ - исполнительный механизм)
СЭР с модуляцией применяются преимущественно в радиотехнических устройствах. Для оптимизации промышленных объектов такие системы применяются редко.
Этот способ неприемлем в силу особенностей процесса транспортирования нефтегазовой среды, так как входному сигналу - изменению нагрузки трубопровода, невозможно придать ту вспомогательную модуляцию, с помощью которой определяется направление движения системы к экстремуму.
СЭР шагового типа
Структурная схема шаговой СЭР показана на рис. 6. Измерение выхода y объекта в системе происходит дискретно (за датчиком выхода объекта имеется импульсный элемент ИЭ1), т.е. через промежутки времени dt (dt - период повторения импульсного элемента). Импульсный элемент преобразует изменяющуюся выходную величину y объекта в последовательность импульсов, высота которых пропорциональна значениям y в моменты времени t = ndt.
Между сигнум-реле CP и исполнительным механизмом ИМ (рис. 6) включен еще один импульсный элемент ИЭ2 (работающий синхронно с ИЭ1), который осуществляет периодическое размыкание цепи питания ИМ, останавливая ИМ на это время.
Исполнительный механизм в подобных СЭР обычно осуществляет изменение входа x объекта шагами на постоянную величину dx.
Сигнум-реле изменяет направление последующего шага dxn+1 исполнительного механизма, если величина dyn становится меньше нуля.
В шаговых СЭР для обеспечения устойчивости необходимо, чтобы движение системы к экстремуму было немонотонным.
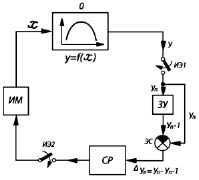
Рис. 6. Структурная схема шаговой СЭР
В некоторых случаях длительность интервала между шагами определяется в зависимости от скорости изменения выходного сигнала. Таким образом, при быстро меняющемся входном сигнале, когда система находится вдали от экстремума, частота шагов возрастает.
При подходе же системы к экстремуму частота шагов снижается, так как скорость изменения выходного сигнала падает по мере приближения к экстремуму. Такого рода системы имеют лучшие динамические характеристики, чем системы с постоянным периодом между шагами.
Стратегия поиска у шагового экстремального регулятора или автоматического оптимизатора АО заключается в следующем. Из положения, в котором находится система оптимизации, производится шаг на уменьшение или увеличение значения эффективности транспортирования нефтегазовой среды. Если в результате этого движения увеличивается критерий эффективности процесса транспортирования нефтегазовой среды, то система продолжает движение в том же направлении; если уменьшается величина критерия эффективности, то система реверсируется. При этом если шаг изменения регулирующего воздействия конечен, система всегда пройдет экстремум, и вокруг точки экстремума установятся автоколебания, частота и амплитуда которых будут зависеть от параметров объекта и начальных условий.
Наибольшее распространение получили системы автоматической оптимизации с постоянным шагом регулирования. Направление движения в этом случае будет определяться знаками приращения показателя эффективности процесса транспортирования НГВС и предыдущего приращения регулирующего воздействия.
Управление производится по следующему алгоритму:
 при
при ![]() ,
,
![]() при
при ![]() ,
,
![]()
Основные результаты
Проведенный анализ показывает, что для оптимизации процесса транспортирования нефтегазовой среды наиболее приемлем способ, основанный на шаговом принципе поиска экстремума.
Список литературы
- Адаптивные системы автоматического управления / под ред. В.Б. Яковлева. - Л.: Изд-во Ленингр. ун-та, 1984. - 204 с.
- Траксел Д. Синтез систем автоматического регулирования. - М.: Машиностроение, 1989. - 759 с.
Библиографическая ссылка
Николаев А.Б., Остроух А.В., Марсов В.И., Илюхин А.В. СРАВНИТЕЛЬНЫЙ АНАЛИЗ СИСТЕМ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ ПРОЦЕССОВ ТРАНСПОРТИРОВАНИЯ НЕФТЕГАЗОВОДЯНОЙ СМЕСИ // Современные наукоемкие технологии. 2011. № 3. С. 35-39;URL: https://top-technologies.ru/ru/article/view?id=26833 (дата обращения: 13.06.2026).