



Рассматриваемое техническое решение свободно от недостатков присущих известным приводам. Данное устройство содержит меньшее количество элементов и в него введена дополнительная цепь обратной связи, что способствует увеличению устойчивости системы и увеличению помехозащищенности привода перемещения. Привод рис.1 состоит из основного усилителя мощности 1, к выходу которого подключена обкладка 2 пьезоэлектрического привода 4 с датчиком обратной связи 5. Для уменьшения помех, возникающих в цепи основного усилителя мощности 1 и пьезоэлектрического привода 7, введена дополнительная цепь управления. Цепь состоит из двухвходового сумматора 4, к одному из входов которого через фазовращатель 8 подключен вход основного усилителя мощности 1, а к другому - датчик 5, выход сумматора через корректирующее звено 9 и дополнительный усилитель 6 соединен с обкладкой 3 привода перемещения 4. Помехи, вызывающие смещения на обкладке 2 корректируются смещением в структуре пьезоэлектрика на обкладке 3 привода перемещения 4. Фазовращатель 8 служит для задержки части входного сигнала с напряжением U2, поступающего на второй вход сумматора 7, на время необходимое для прохождения другой части входного сигнала по цепи: основной усилитель мощности 1, пьезоэлектрический привод 4, датчик обратной связи 5 до поступления его с напряжением U1 на первый вход сумматора 7. Датчик 5 служит для преобразования колебаний пьезоэлектрического привода в напряжение. Корректирующее звено 9 с коэффициентом передачи a служит для выравнивания в рабочем диапазоне частот суммарной АЧХ цепи из усилителя 6 и пьезоэлектрического привода, а также для компенсации сдвига фаз в этой цепи между напряжением сигнала на выходе сумматора и напряжением на выходе усилителя мощности 6.
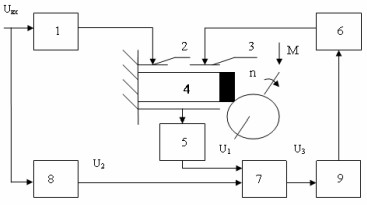
Рис. 1. Пьезоэлектрический привод перемещения с системой защиты от помех
Работу устройства можно пояснить следующим образом. Деформация, возникающая в преобразователе за счет приложенного к его пластинам напряжения UB(t) состоит из двух слагаемых ξ = ξc + ξu, где ξc - деформация, вызванная неискаженным сигналом, т.е. сигналом на входе УМ; ξu - деформация, вызванная сигналом искажений, возникающих в УМ и пьезоэлектрике. Напряжение сигнала U1 на выходе датчика ДК также представляет собой сумму
![]()
где Uc и Uu - напряжения, пропорциональные соответственно деформациям вызванным неискаженным и искаженным сигналом.
По своему определению напряжение Uc должно быть пропорционально напряжению входного сигнала UBX, т.е. Uc = k1 UBX, где k1 - постоянный частотно- независимый множитель.
Тогда из приведенных выражений получим Uc = k1UBX + Uu. Напряжение U1 , содержащее в себе информацию об искажениях, поступает на один вход сумматора. Эти искажения возникают, в основном, в УМ и пьезоэлектрике, так как путем коррекции характеристики передачи датчика ДК его искажающее действие на сигнал несущественно. На другой вход сумматора поступает сигнал с входа УМ напряжением U2, задержанный на время прохождения входного сигнала по цепи УМ, пьезоэлектрик, ДК. Напряжение U2 связано простым соотношением с входным напряжением U2 = k2UBX, где k1 - постоянный коэффициент. В сумматоре происходит масштабирование напряжения U2 с масштабным множителем η = k1 / k2 , инвертирование напряжения U1 и сложение этих двух преобразованных напряжений, т.е. фактически происходит их вычитание. Таким образом, напряжение на выходе сумматора UΣ имеет следующий вид: UΣ = ηU2 - U1 = k1 Uвx - k2Uвx - Uu = -Uu.
Из этого выражения видно, что напряжение UΣ представляет собой напряжение сигнала искажений, но с противоположенной фазой. Далее этот сигнал проходит через корректирующее звено, дополнительный усилитель и поступает на пьезоэлектрик, где и преобразуется в деформацию. Если в цепи: корректирующее звено, дополнительный усилитель, преобразователь, датчик сигнал изменяется мало, а набег фазы существенно меньше 90о, то деформация, вызванная напряжением искаженного сигнала при соответствующем коэффициенте усиления дополнительного усилителя будет по фазе противоположна и мало отличаться от деформации вызванной напряжением поступившим с выхода УМ.
Таким образом, непосредственно в структуре пьезоэлектрического привода происходит подавление искажений и стабилизация частоты возбуждения пьезоэлектрика.
Библиографический список
- Ерофеев А. А., Ковалев В.С. Современная нетрадиционная электроника - М.: Знание, 1989. - 64 с.
- Ерофеев А. А. Пьезоэлектрические устройства автоматики. - Л.: Машиностроение,1982. - 212с.
Библиографическая ссылка
Зибров В.А., Кокарев И.В. ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕЩЕНИЯ С СИСТЕМОЙ ЗАЩИТЫ ОТ ПОМЕХ // Современные наукоемкие технологии. 2005. № 11. С. 42-43;URL: https://top-technologies.ru/ru/article/view?id=26427 (дата обращения: 04.07.2026).