



Для реализации контуров регулирования предназначены модули 411 и 412. Первый используется для управления регулирующим клапаном с постоянной скоростью хода штока и имеет 2 дискретных выхода, а второй имеет аналоговый выходной сигнал. На каждом модуле можно реализовать 2 контура регулирования.
Для программирования модулей используется пакет GET-TM, проектирование в нем осуществляется в графическом виде. Для создания функционального плана необходимо выбрать из библиотеки требуемые функциональные блоки и соединить их линиями связи. Конвертация и генерация кодов на основе созданных функциональных планов в GET-TM происходит автоматически.
Для реализации простейшей одноконтурной системы регулирования с ПИ-регулятором необходимо выбрать 2 функциональных блока, показанных на рис.1 и рис.2.

Рис.1. Функциональный блок RES
На рис.1:
Входные команды:
P - команда закрыть/открыть по защите, имеет наибольший приоритет, разрешения не требуется
RY - разрешение на закрытие/открытие в режиме "ручное"
RC - разрешение на закрытие/открытие в режиме "автомат"
M - команда открыть/закрыть дистанционного управления, для выполнения дополнительно требуется сигнал разрешения
A - команда открыть/закрыть автоматического управления, для выполнения дополнительно требуется сигнал разрешения
MO - перевод в режим "ручное"
AO - перевод в режим "автомат"
M/A - переключение режимов "автомат"/"ручное"
RM - разрешение переключения режимов "автомат"/"ручное"
RTD - сигнал о исправности измерения параметров, участвующих в регулировании, "0" принудительно переводит регулятор в режим "ручное"
TDD - сигнал о неисправности измерения параметров, участвующих в регулировании, "1" принудительно переводит регулятор в режим "ручное"
FM - сигнал о принудительном переводе в режим "ручное"
FMB - сигнал о принудительном переводе в режим "ручное" из-за ошибки
Выходные сигналы:
ARZU - информация о положении "закрыт"
ARAF - информация о положении "открыт"
H - информация о работе в режиме "ручное"
A - информация о работе в режиме "автомат"

Рис. 2. Функциональный блок PI
На рис.2:
XD - рассогласование -100 ÷ +100%
XWW - рассогласование с учетом зоны нечувствительности
KP - коэффициент усиления регулятора
TN - время интегрирования регулятора
ASW - величина зоны нечувствительности
TY - время хода регулирующего клапана (для 411)
MIMPL - минимальная длительность импульса (для 411)
В простейшем случае вход XD функционального блока PI привязывается к разности текущего и заданного значения регулируемого параметра, приведенного к диапазону -100 ÷ +100%. Заданное значение может быть как постоянным, так и переменным. Для построения каскадных или многоимпульсных систем регулирования можно сформировать сигнал рассогласования более сложным образом, используй стандартные функциональные блоки: сложение/вычитание, умножение/деление, интегрирование/дифферен-цирование.
Выходные команды жестко привязаны к определенным аппаратным "ножкам", логическая "1" будет соответствовать 24В, а аналоговый сигнал будет преобразован в унифицированный 0..10В. После проведения монтажа, конвертации функциональных планов, генерации и передачи кодов и внесения изменений в OM650 создание регулятора будет окончено.
На рис. 3 показано изображение регулирующего клапана, значок вызова окна управления регулятором, значок вызова задатчика регулируемого параметра и индикатор степени открытия регулирующего клапана на видеограмме операторской станции. На рис. 4 показано окно управления регулятором. На нем можно видеть степень открытия регулирующего клапана, текущее рассогласование и режим работы регулятора. Оператор может менять режим работы, открывать и закрывать регулирующий клапан в режиме "ручное".
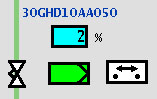
Рис. 3. Изображение регулятора на видеограмме операторской станции
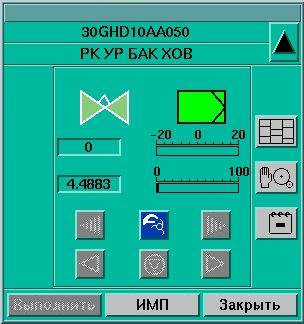
Рис. 4. Окно управления регулятором
Библиографическая ссылка
Забиров Р. Р. РЕАЛИЗАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НА БАЗЕ КОМПЛЕКСА TELEPERM // Современные наукоемкие технологии. 2007. № 2. С. 58-60;URL: https://top-technologies.ru/ru/article/view?id=24233 (дата обращения: 31.07.2026).