



Отличительной особенностью летательного аппарата, схема которого представлена на рис. 1, является высокое значение параметра асимметрии и большое значение силы аэродинамического сопротивления, действующей на вращающиеся с большой угловой скоростью ω крылья W.
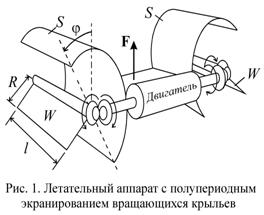
По существу, это - вариант так называемого вибрационного летательного аппарата [1], в котором взаимодействие двух вращающихся в разных направлениях крыльев с окружающим аппарат воздухом в той или иной степени подавлено экранами S. Оценить подъемную силу такого устройства можно достаточно просто. Это - ничто иное, как вибрационная сила [2], которая при нулевом угле наклона полуцилиндрических экранов равна:
 .
.
То есть, при радиусе крыла R=0.5м, длине крыла l=1м, частоте вращения n=ω/2π=50Гц и коэффициенте сопротивления С, близком к единице, подъемная сила должна составить очень большую величину F=1700Н, другими словами, при указанных выше параметрах летательный аппарат способен поднять груз около 170 кг. Именно это обстоятельство спровоцировало подробное экспериментальное изучение модели летательного аппарата, все размеры которого уменьшены в 10 раз. При этом подъемная сила должна уменьшиться в 104 раз и должна составить около 0.17Н. На самом деле экспериментальное значение максимальной подъемной силы примерно вдвое меньше и при частоте вращения n=50 Гц составляет чуть больше 0.1 Н, но все равно это очень много (рис. 2).
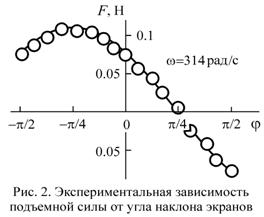
Более того, как оказалось, максимальное значение подъемной силы соответствует углу наклона экранов j»-p/4, а не j»0. Причина таких разногласий между экспериментальными и теоретическими результатами понятна. В приведенном выше простейшем расчете в качестве относительной скорости по отношению к воздуху принималось значение ωr. На самом деле средняя относительная скорость меньше из-за вращения воздуха, обусловленного вращением крыла. Было бы странно, если бы зависимость подъемной силы от угла наклона экранов j отличалась бы от гармонической. А раз так, то приближенно экспериментальные результаты можно описать зависимостью
![]() ,
,
(сплошная кривая на рис. 2). Увеличение радиуса R и длины крыла l при φ=-π/4 в десять раз приводит к значению F=1200Н, что достаточно велико. При частоте вращения n=50Гц, средняя скорость крыла составляет πνR=3.9 м/с, что соответствует диапазону скоростей падения тела в воздухе. При таком диапазоне скоростей сила сопротивления в зависимости от скорости растет быстрее, чем скорость в квадрате [3]. Именно это обстоятельство позволяет надеяться на то, что представленный выше на рис. 1 летательный аппарат окажется эффективнее, чем многие известные способы полета [4]. Чтобы этот вывод стал обоснованным, необходимы зависимость подъемной силы от угловой скорости и проверка правила автомодельности. Без этих результатов идея может показаться неперспективной.
СПИСОК ЛИТЕРАТУРЫ
- Герасимов С.А. Летательный аппарат с изменяемой геометрией машущего крыла. // Техника и технология. 2005. № 5 . С. 17-22.
- Блехман И.И., Джанелидзе Г.Ю. Вибрационное перемещение. - М.: Наука. 1964. - 412 с.
- Герасимов С.А. Параметр асимметрии зонтообразного тела. // Успехи современного естествознания. 2006. № 7 . С. 20-22.
- Стасенко А.Л. Физика полета. - М.: Наука. 1988. - 144 с.
Библиографическая ссылка
Герасимов С.А. ВРАЩАЮЩЕЕСЯ КРЫЛО С ПОЛУПЕРИОДНЫМ ЭКРАНИРОВАНИЕМ // Современные наукоемкие технологии. 2007. № 2. С. 39-40;URL: https://top-technologies.ru/ru/article/view?id=24217 (дата обращения: 31.07.2026).