



В условиях лесного склада отдельные виды работы, а именно определение отклонений от проектного положения в плане и профиле нами были предложены в работе [2].
В данной работе мы представляем программу для построения графического изображения рельсовых нитей кранового пути, непосредственно на лесном складе, при наличии компьютера. Это позволит по нашему мнению достаточно быстро оценить действительные значения планово-высотных параметров кранового пути. Сравнив их с нормируемыми, получить качественную картину действительного положения параметров пути.
Программа
for i:=1 to n do begin
if Form2.ResultsOfMeasurements.Cells[i,1] <> ´´ then
ResOfMeas[i,1]:=StrToInt(Form2.ResultsOfMeasurements.Cells[i,1]) else ResOfMeas[i,1]:=0;
if Form2.ResultsOfMeasurements.Cells[i,2] <> ´´ then
ResOfMeas[i,2]:=StrToInt(Form2.ResultsOfMeasurements.Cells[i,2]) else ResOfMeas[i,2]:=0;
if Form2.ResultsOfMeasurements.Cells[i,3] <> ´´ then
ResOfMeas[i,3]:=StrToInt(Form2.ResultsOfMeasurements.Cells[i,3]) else ResOfMeas[i,3]:=0;
if Form2.ResultsOfMeasurements.Cells[i,4] <> ´´ then
ResOfMeas[i,4]:=StrToInt(Form2.ResultsOfMeasurements.Cells[i,4]) else ResOfMeas[i,4]:=0;
end;
for i:=1 to n-1 do begin
CornLongA[i]:=(ResOfMeas[i+1,1]-ResOfMeas[i,1])/Form1.DistBetwGaug.Value;
if CornLongA[i]<0 then CornLongA[i]:=CornLongA[i]*(-1);
CornLongB[i]:=(ResOfMeas[i+1,2]-ResOfMeas[i,2])/Form1.DistBetwGaug.Value;
if CornLongB[i]<0 then CornLongB[i]:=CornLongB[i]*(-1);
end;
for i:=1 to n do DiffMark[i]:=ResOfMeas[i,1]-ResOfMeas[i,2];
for i:=1 to n do TrackWidth[i]:=Form1.TrackWidth.value*1000 + ResOfMeas[i,3] + ResOfMeas[i,4];
for i:=1 to n do TrackWidthOtkl[i]:=Form1.TrackWidth.value*1000-TrackWidth[i];
max1:=-200; max2:=-200; max3:=-200; max4:=-200; min1:=200 ; min2:=200; min3:=200 ; min4:=200;
for i:=1 to n do begin
if ResOfMeas[i,1]>max1 then max1:=ResOfMeas[i,1];
if ResOfMeas[i,1]<min1 then min1:=ResOfMeas[i,1];
if ResOfMeas[i,2]>max2 then max2:=ResOfMeas[i,2];
if ResOfMeas[i,2]<min2 then min2:=ResOfMeas[i,2];
if ResOfMeas[i,3]>max3 then max3:=ResOfMeas[i,3];
if ResOfMeas[i,3]<min3 then min3:=ResOfMeas[i,3];
if ResOfMeas[i,4]>max4 then max4:=ResOfMeas[i,4];
if ResOfMeas[i,3]<min4 then min3:=ResOfMeas[i,4];
end;
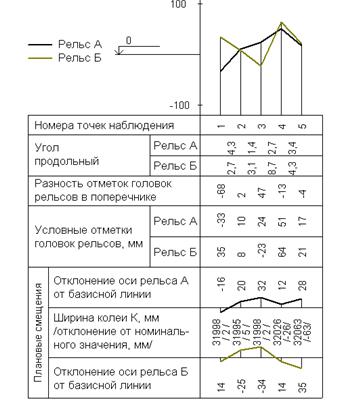
Рис. 1. Планово-высотное положение кранового пути
СПИСОК ЛИТЕРАТУРЫ:
- Комплексное обследование крановых путей грузоподъемных машин. РД 10-138-97. - M.: 1997.
- Салахутдинов Ш.А. Методика определения планово-высотного положения крановых путей лесных складов. Естественные и технические науки //Ш.А. Салахутдинов, Р.Н. Ковалев. - 2006. - №2(22).-с. 215-220.
- Культин Н.Б. Основы программирования в Delphi 7 //Н.Б. Культин. - СПб.: БХВ-Петербург, 2003. - 608 с.
Библиографическая ссылка
Салахутдинов Ш.А., Обрезков А.А. ПРОГРАММА ПОСТРОЕНИЯ ПЛАНОВО-ВЫСОТНОГО ПОЛОЖЕНИЯ КРАНОВОГО ПУТИ ЛЕСНОГО СКЛАДА // Современные наукоемкие технологии. 2008. № 3. С. 25-26;URL: https://top-technologies.ru/ru/article/view?id=23300 (дата обращения: 03.07.2026).