


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
DEVELOPMENT OF BOTH A METHOD AND ALGORITHM FOR SEARCHING FOR AN OBJECT IN A VIDEO STREAM BASED ON A THRESHOLD RECOGNITION SIGNAL

Введение
Столкновения судов, сопровождающиеся человеческими жертвами, утратой транспортных средств и значительными экономическими потерями, представляют собой одну из наиболее приоритетных и актуальных проблем обеспечения безопасности морского транспорта на современном этапе его развития. В связи с этим задача предотвращения столкновений приобретает ключевое значение в системе безопасности судовождения и требует комплексного подхода к своему решению [1].
Анализ обстоятельств столкновений, происшедших вследствие ошибочных действий человека, свидетельствует о том, что в их основе лежат, как правило, нарушения требований Международных правил предупреждения столкновений судов в море 1972 г. (МППСС-72), неполное знание и неверная оценка навигационной обстановки, а также недостаток информации, необходимой для эффективного использования имеющихся на борту технических средств и принятия адекватного решения по предотвращению столкновения [2]. Указанные факторы в совокупности создают предпосылки для развития аварийной ситуации.
Существенное влияние на степень риска возникновения столкновения оказывают также внешние, объективно существующие факторы, среди которых особое место занимают неблагоприятные гидрометеорологические условия, такие как ограниченная видимость, штормовая погода, сложная ледовая обстановка. В этой связи приоритетной задачей обеспечения безопасности судоходства остается предотвращение столкновений между судами как наиболее опасного вида морских происшествий [3].
Активное развитие концепции морских автономных надводных судов (Maritime Autonomous Surface Ships − MASS) открывает новые перспективы для обеспечения безопасности навигации. Внедрение автономных технологий позволяет существенно снизить негативное влияние человеческого фактора, который, по различным оценкам, является причиной подавляющего большинства морских аварий. Такой переход к широкому использованию автономных технологий сопряжен с необходимостью решения целого ряда сложных технических задач. Ставится задача создания систем, способных в автоматическом режиме воспринимать окружающую обстановку с использованием различных сенсоров, корректно интерпретировать получаемые данные и на их основе принимать адекватные решения по управлению судном, включая решения по расхождению с другими объектами [4].
Для достижения целей обеспечения безопасности судоходства разрабатываются и постоянно совершенствуются правила и рекомендации, основанные на результатах научных исследований и учитывающие требования действующих международных конвенций и кодексов.
Обеспечение безопасного движения судов во многом определяется эффективностью функционирования системы навигационных знаков. Навигационные знаки, включая плавучие буи и стационарные знаковые сооружения, выполняют функцию визуальных ориентиров, предупреждают судоводителей о навигационных опасностях, обозначают границы судоходных каналов и подходов к портам. В сочетании с картографическими материалами и современными электронными средствами навигации они создают надежную основу для принятия капитаном и экипажем безопасных решений при управлении судном.
Цель исследования – повышение безопасности судоходства путем совершенствования методов распознавания навигационных знаков в системах автоматизированного управления движением судов.
Материалы и методы исследования
Система морской навигации представляет собой комплекс средств, предназначенных для обеспечения безопасного движения судов. Навигационные знаки формируют базу «первичной» информации, на которую операторы полагаются в ранних этапах планирования курса и в случае временных ограничений. Комплексная система обеспечивает синхронность между физическими признаками на воде и виртуальными данными на экранах [5].
Основные принципы функционирования системы навигационных знаков заключаются в их стандартизации (единообразии применения в различных регионах), поддержании актуальности информации об их местоположении и характеристиках, а также в интеграции с международными правилами плавания [6]. Системы навигационных знаков ориентированы на обеспечение процесса «согласования» действий между береговыми властями, отвечающими за оборудование акваторий, и судоводителями, использующими эти знаки для безопасного плавания. Знаки устанавливаются именно там, где это необходимо для своевременного выявления потенциальных рисков, организации направлений движения судов и обеспечения безопасной дистанции между ними в узких местах, на подходах к гаваням, а также для обозначения мелей, затонувших объектов и других опасных зон [7].
Классификация плавучих знаков
|
Латеральные знаки |
|
|
|
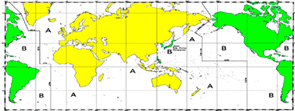
Латеральные знаки (знаки левой и правой стороны) − выставляются по принципу ограждения сторон фарватера. Стороны ограждаются буями или вехами. На корпусах буев могут наноситься цифры или буквы. Нумерация буев или обозначение буквами в алфавитной последовательности ведется со стороны моря. В регионе А на латеральных знаках, выставляемых на левой и правой сторонах фарватера, зажигаются соответственно красные и зеленые огни. В регионе Б на латеральных знаках, выставляемых на левой и правой сторонах фарватера, зажигаются соответственно зеленые и красные огни |
|
Кардинальные знаки |
|
|
|
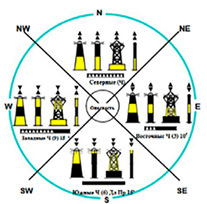
Кардинальные знаки выставляются с целью ограждения навигационных опасностей (например, мель, затопленный объект, иные подводные препятствия, создающие опасность судоходству). Существует четыре кардинальных знака, и каждый из них имеет отношение к своей стороне света: северный знак, восточный, южный или западный |
|
Знаки, ограждающие отдельные опасности |
|
|
|
Знаки, ограждающие отдельные опасности незначительных размеров, выставляются непосредственно над опасностью и могут быть обойдены с любой стороны. Окрашены в черный цвет с одной или несколькими черными полосами |
|
Осевые знаки |
|
|
|
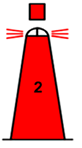
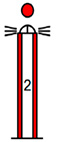
Осевые знаки, или знаки чистой воды, служат для обозначения оси фарватера или в качестве подходных. Они представляют собой буи сферической или столбовидной формы и вехи с топовой фигурой в виде красного шара. Знаки окрашены вертикальными красными и белыми полосами. |
|
Знаки специального назначения |
|
|
|
Знак специального назначения устанавливается для обозначения границ специальных зон: купальных, рыболовецких, якорных стоянок, военных маневров |





Примечание: составлена авторами на основе источника [8].
Навигационные знаки помогают морякам ориентироваться, удерживать правильный курс и избегать опасных участков. Их можно разделить на несколько типов (таблица).
Для обучения и тестирования алгоритмов распознавания критически важны качественные и репрезентативные наборы данных. В отличие от сферы автономных автомобилей, где существуют обширные публичные базы дорожных знаков, в морской области публичных размеченных наборов данных с морскими навигационными знаками крайне мало.
Для обучения и тестирования алгоритмов распознавания критически важны качественные и репрезентативные наборы данных [9]. В отличие от сферы автономных автомобилей, где существуют обширные публичные базы дорожных знаков, в морской области публичных размеченных наборов данных с морскими навигационными знаками крайне мало.
Разработке методов и алгоритмов классификации и распознавания объектов на изображениях посвящены многие работы зарубежных и российских авторов [10, 11].
Существующие базы имеют следующие особенности [12]:
– небольшое количество кадров, что делает базу недостаточно репрезентативной для тестирования детектора знаков;
– ограниченное количество классов знаков, что делает невозможной оценку обобщаемости алгоритма на большое количество классов знаков;
– количество изображений, приходящихся на один класс, небольшое, что усложняет тестирование классификаторов, требующих больших обучающих выборок.
Для проведения исследований необходимо формировать собственные наборы данных. Источниками изображений могут служить:
1. Кадры, полученные с широкоформатных камер (ХЗ), установленных на судах.
2. Фотографии с мобильных устройств и видеорегистраторов, сделанные во время рейсов.
3. Изображения из открытых источников, навигационных карт и лоций.
В данной работе авторами представлен один из примеров реализации модели распознания и классификации навигационного знака при сравнении контура шаблонного изображения в записанном видеопотоке. Методы цифровых технологий обеспечивают необходимую точность восстановления и фильтрации изображений при динамических искажениях кадра [13].
Основной задачей выступает классификация, поиск и распознавание объектов (в виде навигационных знаков) при автономном безэкипажном судовождении с использованием шаблонных изображений и входного сигнала в виде видеопотока [14].
На основании возможностей библиотек видеообработки в SimlnTech разработан алгоритм распознавания навигационных морских знаков из видеопотока, фиксированного с движущегося в море судна.
При решении данной задачи ставится вопрос сопоставления контура шаблона и соответствующего кадра изображения, и исключения несоответствия. Одним из возможных методов установления контроля точности и достоверности и дальнейшей корректировки изображения устанавливаются пороговые значения, рассчитывается коэффициент корреляции.
Для определения меры сходства используем нормализованный кросс-коэффициент корреляции. Значение нормализованного коэффициента корреляции находится в диапазоне –1 ≤ Rp ≤ 1, но для точности сопоставления изображений требуется, чтобы коэффициент корреляции по значению был близок к единице.
Для этого будет произведено сравнение величины коэффициентов корреляции анализируемого изображения с разными эталонными и будем считать, что анализируемое изображение соответствует тому эталону, для которого модуль коэффициента корреляции максимален и превышает некоторый пороговый уровень. При этом коэффициент Rp корреляции изображения с p-м эталоном может быть вычислен по формуле
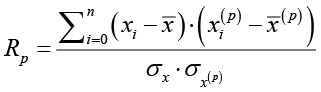 , (1)
, (1)
где  яркость по элементу текущего фрагмента изображения и эталонного;
яркость по элементу текущего фрагмента изображения и эталонного;
 математическое ожидание (среднего значения) яркости объекта и эталона;
математическое ожидание (среднего значения) яркости объекта и эталона;
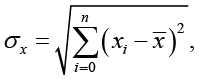
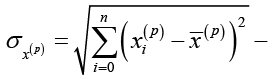 среднее
среднее
квадратическое отклонение.
Для поиска шаблона в другом изображении с двумя сигналами используется корреляционная функция вида [15]:
 , (2)
, (2)
где f(x,y) – исходное изображение;
t(u,v) – искомый шаблон;
f(x,y) – среднее значение интенсивности изображения;
t(u,v) – среднее значение интенсивности шаблона.
Сопоставление изображения с помощью определения взаимной корреляции является оптимальным решением, позволяющим определить отличие объекта в видеопотоке от эталонного.
Результаты исследования и их обсуждение
В разработанной схеме обработки видеопотока программы SimInTech реализован следующий алгоритм идентификации объекта.
На вход блока подаются три сущности: эталонный контур искомого знака (шаблон), кадр видеопотока, на котором этот шаблон был впервые обнаружен, а также массив всех найденных контуров с привязкой к соответствующим кадрам. Поскольку изображение знака находится внутри детектированного контура, активируется свойство «Использовать минимальные описанные контуры», позволяет преобразовать исходные контуры в минимальные выпуклые многоугольники, описывающие объект.
Далее выполняется нормализация всех полученных контуров. С помощью свойств «Нормализованный размер контура по оси X» и «Нормализованный размер контура по оси Y» каждый контур (и область внутри него) приводится к заданному эталонному размеру.
После нормализации для каждого контура рассчитывается коэффициент корреляции. Сравниваются не сами контуры, а изображения, находящиеся внутри них, с исходным шаблоном знака. В свойстве «Порог коэффициента корреляции» задается минимальное значение, при превышении которого объект считается распознанным.
Таким образом, при расчете имеем результат с изображением выбранной области и наложенной на нее маской судового знака (рис. 1) [15].
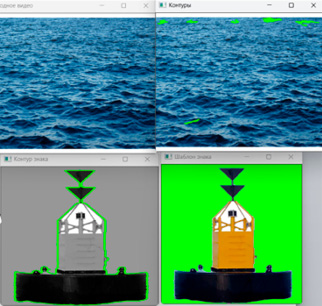
Рис. 1. Алгоритм распознавания и наложения контура Примечание: составлен авторами по результатам данного исследования
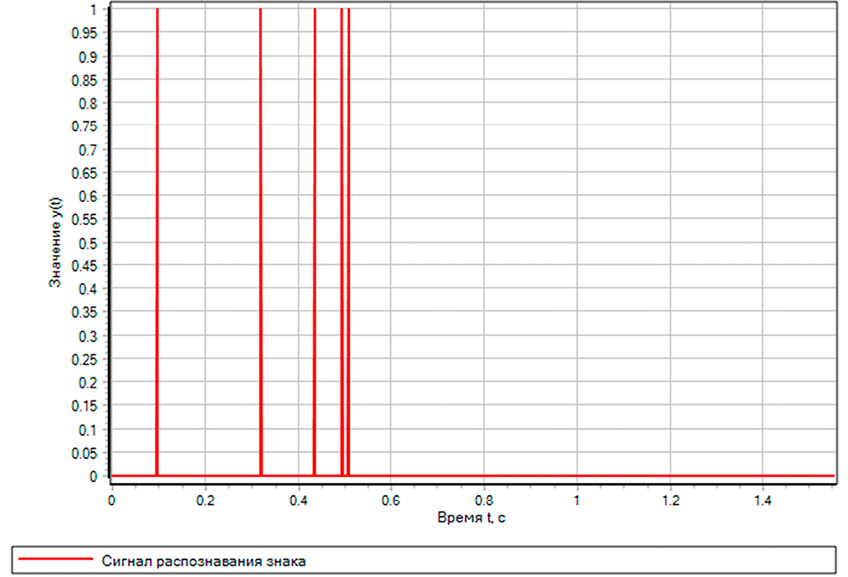
Рис. 2. График распознавания детектирования знака Примечание: составлен авторами по результатам данного исследования
Выходной сигнал распознавания принимает значение «1» (рис. 2), что свидетельствует об успешном нахождении знака в видеопотоке. Корректность поиска дополнительно подтверждается визуально – наложенный на объект контур исключает вероятность ложного срабатывания.
Таким образом, на выходе формируется изображение выбранной области с наложенной маской судового знака.
Заключение
Система навигационных знаков обеспечивает безопасность движения судов, особенно в открытом море и при подходе к портам. Она выполняет несколько важнейших функций: позволяет судну точно определить свое положение относительно фарватера; предупреждает о подводных камнях, рифах, мели и других опасностях; обеспечивает возможность безопасного движения ночью и в условиях ограниченной видимости; помогает регулировать движение судов в узких проливах, устьях рек и у портов.
Разработанная система с помощью SimlnTech успешно распознает навигационные огни и знаки, учитывая различные условия видимости и характеристики объектов, а также помогает повышать безопасность судоходства, снижать влияние человеческого фактора и может быть использована для интеллектуальных систем поддержки судоводителя.
В дальнейшем систему можно расширить: добавить новые типы знаков, повысить точность распознавания и протестировать ее в более сложных сценариях навигации.
Conflict of interest
Financing
Библиографическая ссылка
Лютикова М.Н., Панькина С.И. РАЗРАБОТКА МЕТОДА И АЛГОРИТМА ПОИСКА ОБЪЕКТА В ВИДЕОПОТОКЕ НА ОСНОВЕ ПОРОГОВОГО СИГНАЛА РАСПОЗНАВАНИЯ // Современные наукоемкие технологии. 2026. № 5. С. 67-72;URL: https://top-technologies.ru/en/article/view?id=40777 (дата обращения: 23.07.2026).
DOI: https://doi.org/10.17513/snt.40777