


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
Risk Stratification in Traffic Flow: A Study of Neural Networks and Genetic Clustering for Conflict Detection

Введение
Безопасность дорожного движения остаётся одной из ключевых проблем транспортной инфраструктуры. По данным официальной статистики, несмотря на общее снижение количества дорожно-транспортных происшествий, сохраняется высокий уровень тяжести последствий, причём наибольшая концентрация рисков наблюдается в условиях городского трафика [1]. Существенную долю таких происшествий формируют ситуации, которым предшествуют скрытые либо незафиксированные конфликтные взаимодействия участников движения, из-за чего реальные очаги опасности остаются вне поля зрения традиционного учёта [2]. Под конфликтным взаимодействием далее понимается эпизод сближения участников движения, характеризуемый малыми временными/пространственными зазорами и повышенной вероятностью опасного развития событий. Классические ретроспективные методы анализа аварийности требуют длительного накопления данных, слабо адаптируются к быстро меняющимся потокам и не позволяют заблаговременно выявлять угрозы, до наступления инцидента, что ограничивает возможности превентивного управления [3].
В последние годы активное развитие методов компьютерного зрения и обработки видеопотоков на базе нейросетевых моделей открывает возможность перехода от реактивного к проактивному анализу дорожной обстановки. Однако многие существующие решения по-прежнему сконцентрированы на постфактумном распознавании событий или отслеживании отдельных объектов и не обеспечивают системного анализа взаимодействий, эволюционирующих в конфликт. Отсутствие механизмов кластеризации и ранжирования опасных ситуаций затрудняет принятие обоснованных управленческих решений и перенос результатов между локациями [4].
В данной работе рассматривается подход к проактивному выявлению и стратификации конфликтных ситуаций в транспортном потоке на основе обработки видеоданных [5]. Архитектура системы включает нейросетевую детекцию объектов (YOLOv12) и трекинг траекторий (BoT-SORT) [6], последующее агрегирование траекторий во временные взаимодействия и расчёт пространственно-временных метрик, в том числе времени до столкновения (Time to Collision, TTC) и времени после освобождения конфликтной точки (Post-Encroachment Time, PET) [7; 8], а также кластеризацию событий с использованием генетического алгоритма. На этой основе формируются карты зон повышенного риска и автоматизированные аналитические отчёты, что делает подход практически применимым для мониторинга городской сети и раннего предупреждения инцидентов.
Целью работы является исследование применимости сквозного видеоаналитического конвейера для раннего выявления и стратификации конфликтных взаимодействий в городском транспортном потоке.
Материалы и методы исследования
В качестве исходных данных использовались видеозаписи транспортного потока с уличных камер наблюдения, установленных на участках с плотным городским движением. Видеопоток анализировался с целью автоматического выявления потенциальных конфликтных взаимодействий участников дорожного движения, оценки их параметров и последующей стратификации по уровню риска. Общая структура предлагаемой системы обработки представлена на рисунке 1.
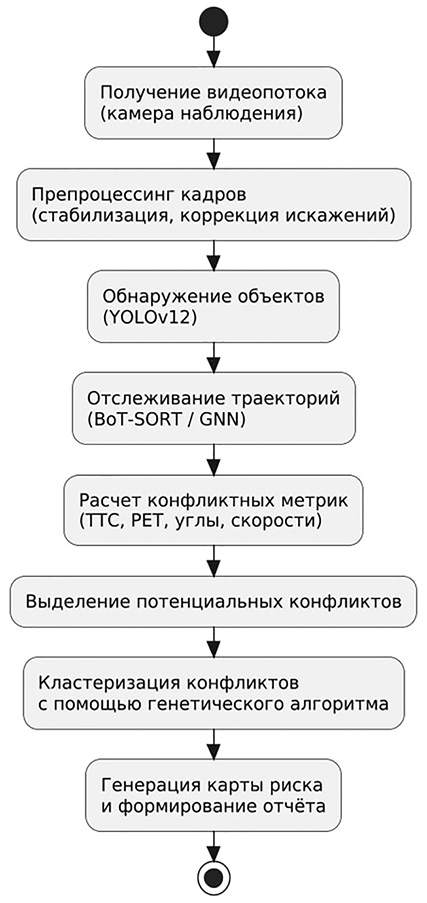
Рис. 1. Структура системы анализа конфликтных ситуаций на основе видеоданных и генетического алгоритма кластеризации Примечание: составлено авторами по результатам данного исследования
Предварительная обработка видеоданных включает стабилизацию изображения, коррекцию оптических искажений и перспективное выравнивание. Детекция объектов осуществляется с использованием нейросетевой архитектуры YOLOv12 – сверточный одношаговый детектор объектов семейства YOLO (одновременная локализация и классификация на одном проходе) – обеспечивающей высокую точность локализации транспортных средств при сохранении скорости обработки, близкой к реальному времени [9]. Алгоритм BoT-SORT – алгоритм отслеживания по детекциям, сочетающий байесовскую фильтрацию движения и повторную идентификацию (Re-ID) по визуальным признакам, применяется для отслеживания идентификаторов объектов между кадрами и поддерживает устойчивость трекинга даже при кратковременных перекрытиях и исчезновениях. Он сочетает байесовскую фильтрацию и повторное обнаружение по визуальным признакам.
Для каждого обнаруженного объекта на протяжении его движения по кадрам формируется пространственно-временная траектория. Анализ взаимного положения пар объектов позволяет идентифицировать потенциальные конфликтные ситуации. При этом для двух объектов i и j, движущихся по координатам (xi(t),yi(t)) и (xj(t),yj(t)), евклидово расстояние между ними определяется выражением:
 (1)
(1)
На основе траекторий вычисляются суррогатные показатели безопасности, характеризующие риск сближения. Временная метрика Time to Collision (TTC) применяется для оценки потенциального времени до столкновения в случае сохранения текущей скорости и направления движения объектов:
ТТС = d / vrel , (2)
где d – расстояние между объектами в момент измерения, а vrel – относительная скорость сближения.
TTC позволяет обнаруживать быстро развивающиеся угрозы, особенно в случаях движения по пересекающимся траекториям.
Дополнительно используется метрика Post-Encroachment Time (PET), рассчитываемая как модуль разности времён прохождения объектами точки потенциального конфликта:
PET = |tA – tB|, (3)
где tA и tB – моменты времени, в которые объекты A и B, соответственно, покидают и входят в зону конфликта.
PET характеризует временной зазор между двумя участниками движения при последовательном прохождении пересекающихся траекторий, что особенно актуально для оценки конфликтов с участием уязвимых участников (например, пешеходов и велосипедистов). Геометрическая интерпретация конфликта с расчётом PET приведена на рисунке 2, где схематически показаны пересекающиеся траектории, момент пересечения и соответствующие временные метки. Такая визуализация позволяет наглядно представить, как извлекается информация из траекторных данных.
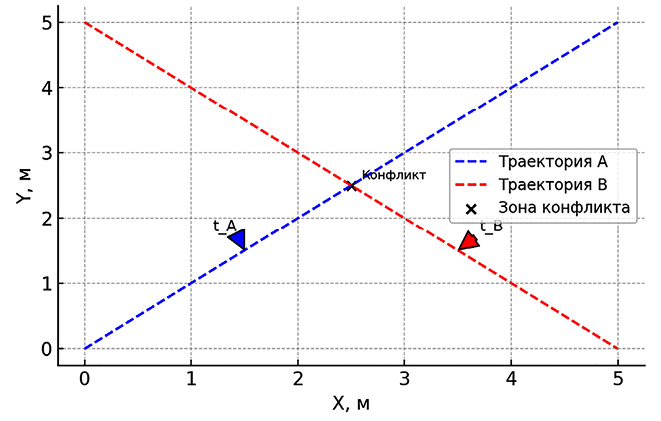
Рис. 2. Геометрическая интерпретация конфликта с расчетом метрики PET между траекториями участников движения Примечание: составлено авторами по результатам данного исследования
На основе совокупности вычисленных параметров формируется вектор признаков для каждой конфликтной ситуации. Под вектором признаков далее понимается упорядоченный набор измеряемых параметров взаимодействия (временных и геометрических), используемых в последующей кластеризации. Вектор включает значения TTC, PET, минимальную дистанцию сближения, угол встречи, относительную скорость, продолжительность конфликта и другие вторичные признаки. Этот многомерный массив используется в задаче кластеризации, цель которой – объединение ситуаций в кластеры по степени потенциальной опасности.
В отличие от традиционных методов, таких как k-средних или иерархическая агломерация, в работе применён генетический алгоритм кластеризации. Под генетическим алгоритмом далее подразумевается эволюционный метод оптимизации, использующий популяцию решений и операторы селекции, скрещивания и мутации для поиска наилучшего разбиения. Он позволяет адаптивно подстраиваться под структуру признаков, учитывать их нелинейные зависимости и находить устойчивые разбиения без предварительного задания числа кластеров [10-12]. Каждая особь в популяции кодирует набор центров кластеров и весов признаков, отвечающих за их значимость в функции расстояния.
Фитнес-функция оценивает качество кластеризации по внутрикластерной компактности и межкластерной разделимости:
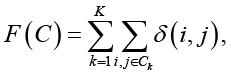 (4)
(4)
где C={C1,C2,…,CK} – разбиение выборки на K кластеров, а δ(i,j) – мера близости объектов внутри одного кластера.
В качестве метрики δ использовалось взвешенное евклидово расстояние между нормализованными признаковыми векторами. Оптимизация проводилась с помощью библиотеки DEAP (Distributed Evolutionary Algorithms in Python) [13]. В процессе эволюции применялись операции селекции по турнирной схеме, одноточечного кроссинговера и вероятностной мутации.
Результатом кластеризации является стратификация всех зафиксированных ситуаций по уровням риска, а также построение карты зон повышенного риска с указанием наиболее конфликтогенных участков городской уличной сети. Под картой зон повышенного риска далее понимается пространственная визуализация интенсивности конфликтных взаимодействий (по сетке/ячейкам или буферам), используемая для приоритизации мер безопасности. На финальном этапе система автоматически формирует отчёт, включающий статистику по времени, координатам, типам участников и степени риска.
Результаты исследования и их обсуждение
Разработанная система была протестирована на видеозаписях общей протяжённостью 4,2 км городских улиц с плотным транспортным потоком. Среднее время полной обработки одного километра видеоданных составило 20–25 минут при использовании GPU RTX 4070, что более чем в десять раз быстрее по сравнению с традиционным экспертным анализом. Модель YOLOv12 показала среднюю точность обнаружения объектов mAP = 0.861, а алгоритм BoT-SORT обеспечил устойчивое отслеживание траекторий с долей успешного сопоставления выше 95 %. mAP (mean Average Precision) – средняя точность по классам; значение рассчитано по стандартной процедуре оценки детекторов объектов.
В результате анализа было зафиксировано 1134 потенциальных конфликтных взаимодействия. Расчёт метрик TTC и PET позволил классифицировать 17,4% событий как критические (TTC < 1.2 c, PET < 0.5 c). Пространственное распределение этих случаев выявило локальные зоны концентрации риска, преимущественно вблизи остановок и пересечений с нерегулируемыми переходами.
Применение генетического алгоритма кластеризации позволило разделить все ситуации на четыре устойчивые группы по признакам риска. Наиболее опасный кластер включал 184 конфликта с медианными значениями TTC = 0.94 C и PET = 0.31 c. По сравнению с алгоритмом k-средних, предложенный подход обеспечил прирост индекса силуэта с 0.42 до 0.61 и снижение внутрикластерной дисперсии на 27,8%, что свидетельствует о более качественном разделении событий. Индекс силуэта – безразмерная метрика [−1;1], показывающая, насколько объект ближе к своему кластеру, чем к соседнему; внутрикластерная дисперсия – среднее квадратичное отклонение точек от центров своих кластеров. Пример результатов кластеризации представлен на рисунке 3, где каждая точка отображает одно конфликтное взаимодействие, а цвет обозначает принадлежность к кластеру. Кластеры, агрегирующие события с малыми значениями TTC и PET, отражают более высокий уровень риска, поскольку характеризуются быстрым сближением и минимальными временными зазорами при пересечении траекторий.
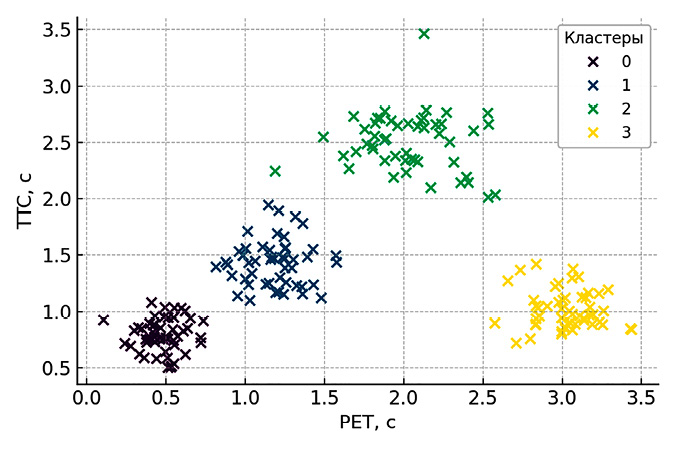
Рис. 3. Пример распределения конфликтных ситуаций по кластерам с указанием уровней риска Примечание: составлено авторами по результатам данного исследования
Напротив, кластеры с большими TTC и/или PET соответствуют безопасным/умеренным взаимодействиям. Смещение центроидов в область малых значений по обеим осям указывает на концентрацию критичных сценариев; преобладание маркеров «ТC–пешеход» в таких группах свидетельствует о необходимости приоритизации мер в соответствующих точках уличной сети. Установленная иерархия кластеров по медианам TTC/PET используется для стратификации риска и прямой привязки к картам зон повышенного риска: ячейки/участки, на которых преобладают кластеры с малыми временными зазорами, подлежат первоочередной проверке организации движения и пешеходной инфраструктуры. Отчётливо прослеживается разделение на группы с разной степенью риска. Кроме кластера с низкими значениями PET и TTC, соответствующего наиболее опасным ситуациям, также выявлены группы с иным характером. В частности, один из кластеров соответствует событиям с низким TTC и высоким PET – то есть потенциально опасным сближениям, которые были своевременно предотвращены [14]. Такие конфликты могут служить индикаторами латентной напряжённости движения и быть полезными для оценки упреждающих мер безопасности [15].
На основе кластеризованных данных была сформирована карта зон повышенного риска, отражающая зоны с повышенной вероятностью возникновения дорожно-транспортных происшествий (ДТП). Сопоставление с архивом реальных происшествий за предыдущие шесть месяцев показало совпадение по координатам в 86% случаев. Генерация итогового отчёта, включающего пространственный анализ, графики и агрегированные таблицы, осуществлялась автоматически и занимала менее одной минуты.
Таким образом, представленная система демонстрирует высокую точность, оперативность и пригодность для применения в задачах мониторинга дорожной инфраструктуры и раннего предупреждения транспортных инцидентов. Полученные визуализации позволяют не только количественно оценить эффективность алгоритма, но и обеспечить интерпретацию результатов для практического использования в городском управлении.
Заключение
Сформулированные в работе критерии критичности на основе пространственно-временных показателей и правила агрегирования траекторий во взаимодействия обеспечивают непротиворечивую основу для последующего анализа. Реализованный воспроизводимый конвейер предобработки, детекции и многообъектного отслеживания (YOLOv12/BoT-SORT) демонстрирует надёжное сопоставление траекторий (доля успешных ассоциаций свыше 95%) и позволяет выявлять широкий спектр потенциальных конфликтов (1134 ситуации, из них 17,4% – критические). Эволюционная кластеризация событий превосходит базовые альтернативы по качеству разбиения: фиксируется рост индекса силуэта на 45% при одновременном снижении внутрикластерной дисперсии на 27,8%, что указывает на более точную стратификацию уровней риска и лучшую интерпретируемость результатов. Внутренняя проверка подтверждает устойчивость кластерной структуры к варьированию порогов и гиперпараметров, внешняя – согласованность полученных карт с независимыми данными о дорожно-транспортных происшествиях. На основе кластеризованных событий автоматически формируются карты зон повышенного риска и аналитический отчёт (формирование занимает менее одной минуты), что демонстрирует практическую пригодность предложенного решения для задач оперативного мониторинга улично-дорожной сети и приоритизации адресных мер безопасности. Таким образом, полученные результаты свидетельствуют о применимости и устойчивости сквозного видеоаналитического конвейера для раннего выявления и стратификации конфликтных взаимодействий в условиях городской транспортной среды.
Conflict of interest
Financing
Библиографическая ссылка
Подберёзкин А.А., Остроух А.В., Пронин Ц.Б., Борзенков А.М., Шмонин А.М. Стратификация рисков в транспортном потоке: исследование нейросетевых и генетических методов кластеризации для выявления конфликтных ситуаций // Современные наукоемкие технологии. 2026. № 2. С. 63-68;URL: https://top-technologies.ru/en/article/view?id=40672 (дата обращения: 29.07.2026).
DOI: https://doi.org/10.17513/snt.40672