


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
FUZZY LOGIC METHODS IN THE PROBLEM OF AUTONOMOUS NAVIGATION BASED ON THE PARAMETERS OF SPATIAL GEOPHYSICAL FIELDS

Введение
В настоящее время задача создания автономных систем навигации не теряет своей актуальности. Эти системы не предполагают использования внешних по отношению к движущемуся аппарату источников навигационной информации, таких как спутники, воздушные и морские суда, сухопутные стационарные объекты.
Инерциальная навигационная система (ИНС), построенная по принципу счисления пути, является примером автономной системы навигации. Недостатком такой системы является принципиальное нарастание погрешности координат с течением времени, в связи с чем возникает необходимость их периодической коррекции. Коррекция координат может быть проведена по параметрам геофизических полей [1; 2].
В навигации используются поверхностные поля Земли (поле рельефа местности, тепловое, оптическое, поле коэффициента отражения радиоволн) и пространственные поля Земли (например, магнитное и гравитационное). Навигация по поверхностным полям, несмотря на большее практическое применение, ограничена сухопутной неоднородной поверхностью Земли. В свою очередь, глобальность и непрерывность пространственных полей позволяют обеспечить практически непрерывную коррекцию ИНС [1, с. 31].
Пространственные геофизические поля принято делить на поля нормальные (связанные с внутренним составом Земли) и аномальные (связанные с составом и свойствами поверхностного слоя Земли) [3, с. 74].
Возможность использования аномальных полей Земли различной физической природы в целях навигации основана на свойстве почти однозначного соответствия распределения параметров какого-либо поля, «образа» этого поля, конкретному месту на земной поверхности [1, с. 30]. Это позволяет каждой точке земной поверхности в какой-либо системе координат поставить в соответствие параметры аномальных полей, допускающие возможность их измерения [3, с. 75]. Например:
− модуль вектора аномальной магнитной индукции и его компоненты;
− компоненты ускорения аномальной силы тяжести и градиента аномальной силы тяжести.
Автономная навигация по аномальным геофизическим полям с определением местоположения аппарата основана на сопоставлении информации, получаемой с помощью датчика поля вдоль траектории движения аппарата, с картой поля, хранящейся в его памяти (эталонное поле). Обычно сопоставление осуществляется посредством вычисления некоторого функционала типа корреляционной функции и анализа ее экстремумов. Такой подход реализован в корреляционно-экстремальных навигационных системах КЭНС [4–6].
Однако аномальные геофизические поля не всегда достаточно полно исследованы, суммарная погрешность измерения, картографирования и вариаций параметров этих полей (например, вследствие магнитных бурь) может быть значительна по величине. Эти обстоятельства делают навигационную задачу недостаточно четко определенной. Поэтому помимо корреляционно-экстремальных методов решения навигационной задачи становится оправданным применение методов, основанных на нечеткой логике [7–9].
Цель исследования – разработка алгоритма определения координат движущегося аппарата по аномальным геофизическим полям Земли на основе методов нечеткой логики.
Материалы и методы исследования
Формализуем постановку задачи и применим нечетко-ассоциативный метод [9].
Пусть  измеряемые параметры аномальных магнитного и гравитационного полей Земли (далее АМПЗ и АГПЗ). Здесь N – число измеряемых параметров, оно произвольно и ограничено только наличием соответствующих карты поля и датчика, при этом карты имеют одинаковые масштаб и градусную сетку.
измеряемые параметры аномальных магнитного и гравитационного полей Земли (далее АМПЗ и АГПЗ). Здесь N – число измеряемых параметров, оно произвольно и ограничено только наличием соответствующих карты поля и датчика, при этом карты имеют одинаковые масштаб и градусную сетку.
Пусть
 –
–
вектор эталонных измерений заданных параметров в точке с координатами  ,
,
а  –
–
совокупность таких эталонных векторов (карта поля).
В процессе движения аппарата формируется совокупность векторов измерений соответствующих параметров АМПЗ и АГПЗ. Пусть  – один из таких векторов, назовем его вектором текущих измерений.
– один из таких векторов, назовем его вектором текущих измерений.
Требуется сопоставить вектор текущих измерений с эталонными векторами из множества H и по результатам сравнений найти  с наибольшей мерой схожести (соответствия). Сравнения выполняются по схеме, показанной на рис. 1.
с наибольшей мерой схожести (соответствия). Сравнения выполняются по схеме, показанной на рис. 1.

Рис. 1. Схема нечетко-ассоциативного метода (Х1 и Х2 – сравниваемые величины, Рх – численный результат нечеткого сравнения) Примечание: составлен авторами на основе источника [9]
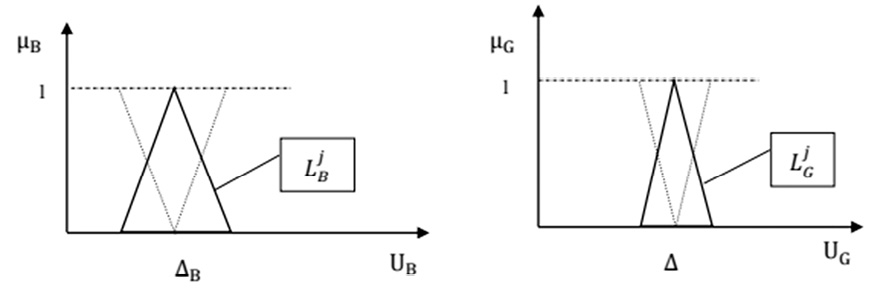
Рис. 2. Функции принадлежности значений лингвистических переменных LB и LG (ΔB – диапазон значений модуля вектора аномальной магнитной индукции с учетом погрешностей измерения, картографирования и возможных вариаций (суточных и при магнитных бурях), ∆ – диапазон значений ускорения аномальной силы тяжести с учетом погрешностей измерения и картографирования) Примечание: составлен авторами по результатам данного исследования
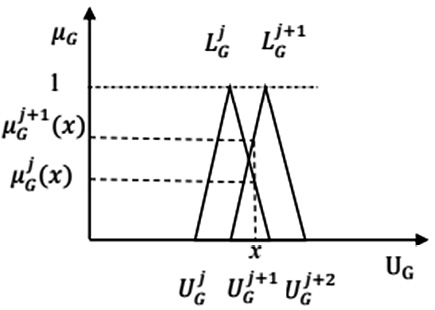
Рис. 3. Функции принадлежности значений лингвистической переменной LG для точки x Примечание: составлен авторами по результатам данного исследования
Перед началом сравнений для каждого измеряемого параметра АМПЗ и АГПЗ определим соответствующую лингвистическую переменную [10]. Например, лингвистическая переменная LB – «модуль вектора аномальной магнитной индукции» или LG – «модуль ускорения аномальной силы тяжести». При задании областей определения и функций принадлежности значений лингвистических переменных следует учитывать физические особенности измеряемых величин (например, для LB – вариации магнитного поля в течение суток или во время магнитных бурь), а также погрешности измерений и картографирования. Варианты задания функций принадлежности значений лингвистических переменных LB и LG показаны на рис. 2.
Рассмотрим подробнее порядок выполнения нечетких сравнений текущих и эталонных значений параметров АМПЗ и АГПЗ.
1. Фаззификации значений измерений (введение нечеткости)
На этом шаге каждому четкому значению рассматриваемого параметра сопоставимо соответствующее нечеткое множество. Рассмотрим для примера модуль ускорения аномальной силы тяжести (далее АСТ).
Обозначим через х какое-либо четкое значение модуля АСТ.
Пусть, к примеру (рис. 3):
 и
и  (1)
(1)
Примечание: Здесь  – непересекающиеся множества, объединение которых дает область определения лингвистической переменной LG; на этих множествах заданы функции принадлежности
– непересекающиеся множества, объединение которых дает область определения лингвистической переменной LG; на этих множествах заданы функции принадлежности  соответствующих лингвистических значений LG.
соответствующих лингвистических значений LG.
Тогда из условия (1) функцию принадлежности искомого нечеткого множества будем строить как усеченную функцию  [9].
[9].
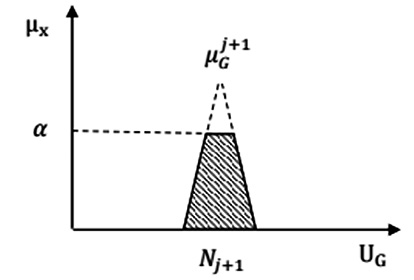
Рис. 4. Функция принадлежности  Примечание: составлен авторами по результатам данного исследования
Примечание: составлен авторами по результатам данного исследования
В качестве уровня отсечения рассмотрим значение  в точке х:
в точке х:  Следовательно, функция принадлежности μx нечеткого множества, соответствующего четкому значению х, имеет вид (рис. 4):
Следовательно, функция принадлежности μx нечеткого множества, соответствующего четкому значению х, имеет вид (рис. 4):
 (2)
(2)
Указанным способом фаззифицируем все четкие значения как текущего, так и эталонных векторов, то есть сопоставим четким значениям текущего вектора  нечеткие множества
нечеткие множества  с функциями принадлежности
с функциями принадлежности  а четким эталонным значениям
а четким эталонным значениям  – нечеткие множества
– нечеткие множества  с функциями принадлежности
с функциями принадлежности 
2. Далее для каждого параметра АМПЗ и АГПЗ выполним попарное сравнение нечеткого множества текущего измерения (с носителем множества Ni), с нечеткими множествами эталонных измерений  . Результатом сравнения каждой пары нечетких множеств будет новое нечеткое множество, функция принадлежности которого ηik имеет вид
. Результатом сравнения каждой пары нечетких множеств будет новое нечеткое множество, функция принадлежности которого ηik имеет вид
 . (3)
. (3)
3. Для дефаззификации нечетких множеств, полученных в результате сравнения, можно использовать метод поиска центра масс. Тогда нечеткому множеству с функцией принадлежности ηik будет соответствовать четкое значение pik:
 . (4)
. (4)
Далее для каждого k просуммируем полученные четкие значения pik по всем измеряемым параметрам:
 . (5)
. (5)
Тогда Pk – это величина, определяющая меру соответствия («схожести») текущего и эталонного векторов в точке с координатами (xk, yk, zk). Здесь считаем все измеряемые параметры АМПЗ и АГПЗ равнозначными, но в общем случае это необязательно, каждый параметр может иметь свой весовой коэффициент.
Результаты исследования и их обсуждение
Описанный выше метод был использован при разработке алгоритма определения координат аппарата по геофизическим полям в некоторой заданной области коррекции, расположенной вдоль его траектории.
Пусть имеются цифровые карты АМПЗ и АГПЗ, покрывающие эту область [11–13]. Требования к картам [14; 15], протяженности и ширине области коррекции, информативности, а также точность определения координат аппарата в данной статье не рассматриваются. Пусть также заданные угловые характеристики траектории и скорость аппарата постоянны в области коррекции.
Задача состоит в построении эталонной траектории аппарата по точкам карт АМПЗ и АГПЗ, в которых параметры этих полей наиболее соответствуют параметрам, измеряемым вдоль реальной траектории движения аппарата. Конечная точка этой траектории даст искомые координаты аппарата на выходе из области коррекции.
Предложен следующий алгоритм решения этой задачи.
1. Разобьем фрагмент реальной траектории движения аппарата на участки [Sk,Sk+1] (рис. 5). Считаем, что в точках Sk в моменты времени tk выполнены измерения параметров АМПЗ и АГПЗ. Кроме этого, известны координаты ИНС точек Sk .
Рассмотрим окрестности точек Sk – O (Sk, rk). Для первой окрестности радиус r1 может быть выбран исходя из оценки предполагаемой ошибки координат в данной точке пути. Далее радиусы окрестностей могут быть изменены.
Найдем точки карты, которые:
− лежат внутри заданных окрестностей O (Sk,, rk),
− имеют значения АМПЗ и АГПЗ, наиболее схожие с измерениями этих полей в соответствующих точках Sk,, для чего вычисляются значения Pk по формуле (5).
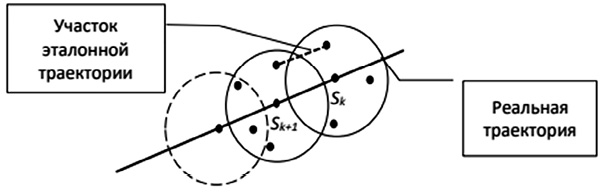
Рис. 5. Построение участка эталонной траектории Примечание: составлен авторами по результатам данного исследования
Обозначим множества таких точек карты для каждой окрестности через Ак. Из точек множеств Ак будем строить эталонные траектории.
2. Рассмотрим возможные комбинации пар точек соседних множеств Ак и Ак+1. Отберем из них пары точек (ak,i; ak+1,j) так, чтобы отрезок [ak,i; ak+1,j] был участком траектории подобно участку [Sk,Sk+1]. Для этого используем следующие критерии:
Первый критерий – физический: если расчетная скорость на этом участке [ak,i; ak+1,j] / ∆tk не соответствует реальной скорости аппарата с учетом погрешности, то этот участок не рассматривается.
Второй критерий – угловой: выполняется проверка соответствия угловых отклонений отрезка [ak,i; ak+1,j] угловым характеристикам заданной траектории.
Если [ak,i; ak+1,j] удовлетворяет этим критериям, то он может рассматриваться в качестве участка эталонной траектории.
3. После перебора заданных по реальной траектории участков [Sk,Sk+1] будет построена одна или более эталонных траекторий, в точках которых параметры АМПЗ и АГПЗ наиболее соответствуют измеренным значениям.
Если построенная траектория одна, то координаты ее конечной точки могут быть рассмотрены в качестве скорректированных координат аппарата на выходе из области коррекции.
Если построенных траекторий более одной, то из них выбирается та, которая имеет наибольшую суммарную по всем участкам меру схожести с реальной траекторией по измерениям АМПЗ и АГПЗ. По величине нормированной суммарной меры схожести (например, если она более 0,95) принимается решение о выполнении корректировки координат аппарата.
Заключение
В статье предложен нечеткий алгоритм определения координат движущегося аппарата по аномальным геофизическим полям Земли.
Этот алгоритм имеет следующие особенности:
− погрешности детектирования, картографирования и вариации измеряемых параметров АМПЗ и АГПЗ изначально учитываются при введении нечеткости и задании соответствующих функций принадлежности;
− в алгоритме отсутствуют требования к какой-либо предобработке исходной информации;
− алгоритм дает обоснованный критерий (вычисленную меру схожести измеряемых и эталонных параметров геофизических полей) для принятия решения о выполнении коррекции координат.
В отличие от алгоритмов КЭНС, рассмотренный нечеткий алгоритм не требует вычисления статистических характеристик навигационных полей или линейной аппроксимации полей в области предполагаемого местоположения аппарата, а также центрирования измеренной и эталонной информации, что способствует его вычислительной эффективности. Нечеткий алгоритм выполняет непрерывное (без срывов, которые возможны в алгоритмах КЭНС) построение эталонных траекторий по измерениям навигационных полей. Нечеткие сравнения позволяют данному алгоритму работать не только с «условно стабильной», но и «возмущенной» исходной информацией.
Conflict of interest
Financing
Библиографическая ссылка
Гришкин В.М., Каткова Е.А. МЕТОДЫ НЕЧЕТКОЙ ЛОГИКИ В ЗАДАЧЕ АВТОНОМНОЙ НАВИГАЦИИ ПО ПАРАМЕТРАМ ПРОСТРАНСТВЕННЫХ ГЕОФИЗИЧЕСКИХ ПОЛЕЙ // Современные наукоемкие технологии. 2026. № 2. С. 17-22;URL: https://top-technologies.ru/en/article/view?id=40665 (дата обращения: 29.07.2026).
DOI: https://doi.org/10.17513/snt.40665