


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
Automated Comprehensive Road Safety Assessment

Введение
Применение алгоритмов нечеткой логики для анализа безопасности дорожного движения (БДД) представляет собой значимое направление научных исследований в сфере транспортной безопасности и управления транспортными потоками [1, 2]. Существующие интеллектуальные системы [3], в том числе основанные на нечеткой логике, обладают рядом ограничений: они оперируют ограниченным набором показателей, что снижает адекватность оценки текущего уровня безопасности дорожного движения и точность прогнозирования [4, 5].
Анализ современных методик оценки БДД [6, 7] показывает, что наибольшей прогностической точностью обладают комплексные подходы, интегрирующие множественные факторные переменные. Сравнительные исследования подтверждают преимущество многомерных моделей, учитывающих широкий спектр предикторов. К наиболее значимым факторам относятся: параметры дорожной инфраструктуры, характеристики транспортных потоков, психофизиологические показатели участников движения и метеорологические условия [3, 8].
Методы прогнозирования ДТП [9] позволяют предсказывать частоту и обстоятельства аварий на основе анализа различных факторов. Для прогнозирования уровня БДД и его динамики применяются регрессионные модели, для предсказания количества ДТП – методы анализа временных рядов, а для краткосрочных прогнозов – модели ARIMA. С использованием технологий машинного обучения [10, 11] и ансамблевых методов разрабатываются модели, способные обрабатывать большие объемы данных и выявлять скрытые зависимости [12].
Цель исследования – совершенствование системы оценивания БДД на основе совмещения стандартных методов оценки и модернизированных алгоритмов нечеткой логики, позволяющих учитывать не только роль конкретных факторов в интегральной оценке уровня БДД, но и взаимное влияние учитываемых предикторов.
Материалы и методы исследования
Данное исследование проводилось на базе института инженерных и цифровых технологий НИУ «БелГУ» совместно с экспертным отделом управления ГИБДД по Белгородской области.
Методология представленного исследования определяется стремлением обеспечить одновременно практическое применение и предсказательную точность разработанной модели [13]. В рамках исследования разработана модель, целью которой является формирование интегрального показателя безопасности дорожного движения. Методологической основой модели выступает аппарат нечеткой логики, а вычислительный процесс реализован посредством структурированной системы правил логического вывода, объединяющей данные по всем анализируемым подсистемам [14]. Проведенный анализ экспертных заключений ГИБДД позволил идентифицировать следующий набор ключевых факторов, оказывающих влияние на уровень БДД: техническая оснащенность дорожной инфраструктуры, модели поведения участников дорожного движения, эксплуатационно-техническое состояние автомобильного парка, внешние климатические и природные воздействия, а также социально-экономический контекст региона.
Метод Мамдани формирует нечеткое множество y, характеризующее оценку подсистемы или системы в целом:
 , (1)
, (1)
где X∗ = (x1∗, x2∗, …, xn∗) – входной вектор, dj – нечеткие термы, μdj(y) – функция принадлежности.
Переход к четкому числовому значению осуществляется через «срезание» функций принадлежности на уровне μdj(х∗) и дефаззификацию ỹ методом центра тяжести [14]:
 , (2)
, (2)
где y* – агрегированное нечеткое множество.
В модели Мамдани процесс нечеткого логического вывода осуществляется в соответствии со следующей схемой – применение операции минимизации для реализации нечеткой импликации; реализация логической связки «AND»; выполнение агрегирования результатов с использованием операции взятия максимума [15].
Результаты исследования и их обсуждение
В сотрудничестве с профильными специалистами проведена оценка воздействия подсистемы «Водитель» на качественные характеристики прочих элементов системы. Реализация данного метода достигается применением специализированных алгоритмов коррекции, ориентированных на целевое преобразование функций принадлежности конкретных термов факторов смежных подсистем. Этот подход обеспечил возможность динамического перераспределения как индивидуальных оценочных значений каждой отдельной подсистемы, так и суммарного интегрального показателя.
При высоком уровне квалификации водителя функция принадлежности параметра «Техническое состояние тормозной системы транспортного средства» сохраняет свою стабильность. Если же квалификация водителя оценивается низко, соответствующая функция подвергается модификации: увеличиваются интервалы, соответствующие отрицательным показателям состояния и уменьшаются границы положительных значений. Такой подход позволил отразить эмпирически обоснованную зависимость: для водителей с недостаточным опытом и/или находящихся в неадекватном состоянии технические характеристики транспортного средства оказывают более значимое влияние на общую безопасность, чем для квалифицированных водителей в нормальном физиологическом состоянии.
Коррекция функций принадлежности отдельных факторов подсистем «Среда» и «Дорога» проводилась аналогичным образом исходя из интегральной оценки технического состояния транспортного средства. Следовательно, для автомобилей с неудовлетворительными техническими характеристиками большее значение в итоговом показателе получают параметры дорожных покрытий и метеорологические условия по сравнению с транспортными средствами, находящимися в оптимальном техническом состоянии.
Процесс вычислений организован поэтапно. Модель предусматривает двухуровневую процедуру вычислений. Первоначально осуществляется расчет интегральных оценок для всех подсистем. Данная операция может выполняться в гибком порядке: параллельно или последовательно для пар подсистем (1–2, 3–4 или 4–3, 2–1). На последующем уровне производится агрегация полученных частных оценок в обобщенный индикатор безопасности дорожного движения. Для этого используется механизм нечеткого логического вывода, опирающийся на заранее формализованную систему продукционных правил, которая учитывает вклад каждой из подсистем.
На основе проведенной декомпозиции системы БДД в качестве основного инструмента был выбран метод Мамдани, предусматривающий этапы построения функций принадлежности (ФП), вычисления частных оценок подсистем и агрегирования результатов в интегральную оценку БДД, что способствовало оптимизации базы правил логического вывода путем уменьшения их количества и сложности.
Предложена многоэтапная методика формирования: 1) интегральных оценок качества подсистем, 2) функций принадлежности для термов оценочной интегральной функции, 3) результирующей оценки уровня дорожной ситуации.
На первом этапе с целью комплексного учета многофакторной природы БДД разработана модель в виде четырех взаимосвязанных подсистем, включающих в себя родственные предикторы: «водитель» (w1), «дорога» (w2), «среда» (w3) и «автомобиль» (w4). Каждая подсистема агрегирует однородные группы предикторов (wik), характеризующие соответствующий аспект дорожной ситуации. Таким образом модель обеспечит учет всех ключевых факторов xi дорожно-транспортной обстановки с особым акцентом на анализ межподсистемных взаимодействий. Оценка качества каждой подсистемы производится на основе алгоритма нечеткого вывода. Для этого вводится лингвистическая переменная (входная и выходная), множество значений которой (термов) включает четыре элемента соответственно А = {a1, a2, a3} и D = {d1, d2, d3}. Каждому терму ставится в соответствие функция принадлежности, а оценка вычисляется согласно заданной базе нечетких продукционных правил: a1 – «низкий», a2 – «оптимальный», a3 – «высокий» или с выводом интегрального значения в пределах от 0 до 100 для оценочной интегральной функции Т.
На следующем этапе задаются ФП входной переменной μjp(xi) для лингвистического терма ai,jp [13]
 ,
,
 (3)
(3)
и ФП выходной переменной μdj(y) к лингвистическому терму dj
 . (4)
. (4)
Для лингвистических термов функции принадлежности выбираются из стандартного набора: trimf, trapmf, gaussmf, gauss2mf, sigmf. Финальный выбор типа функции принадлежности осуществляется на этапе параметризации модели с целью оптимизации выходных показателей. Оценочные значения всех факторов, используемых в рассматриваемой подсистеме, подвергаются процедуре нормализации по единому стоуровневому масштабу в строгом соответствии с предусмотренными алгоритмами трансформации.
Заключительная стадия вычислительного процесса включает расчет общего коэффициента безопасности дорожного движения посредством механизма нечеткого логического вывода, где нормированные оценки всех подсистем выступают в роли исходных аргументов. Итоговая величина представляется двояким образом: в форме лингвистической переменной с тремя градациями – d1 («высокая вероятность ДТП»), d2 («умеренный риск возникновения аварийных ситуаций»), d3 («низкая вероятность аварийных происшествий»); либо в цифровом выражении, варьирующемся в границах интервала [0,100] и количественно отображающем дистанцию дорожной системы от оптимального состояния с позиций вероятности возникновения дорожно-транспортных происшествий.
Выбор формы представления результатов осуществляется на этапе валидации модели на основе критериев интерпретируемости и практической применимости для формирования управленческих решений.
Формирование нечеткого вывода, осуществляемого на основании нечеткой базы знаний, представлено в формулах (3) и (4). Значения степени принадлежности входного вектора X∗= (x1∗, x2∗, ..., xn∗), ассоциированные с нечеткими лингвистическими термами dj, определяются посредством операции s-нормирования (либо t-нормирования).
Расчет степени принадлежности входного вектора X* = (x1, x2, ..., xn*) к лингвистическим термам dⱼ выполняется с использованием операций s-нормировки (или t-нормировки), заданных в используемой базе знаний. Механизм логического вывода с формированием нечеткого множества второго порядка представлен математической моделью
 (5)
(5)
Для преобразования множества лингвистических термов {d1, d2, ..., dm} в четкое числовое значение выполняется процедура, включающая три последующих шага: 1) усечение функций принадлежности: каждая функция принадлежности μdj(y) ограничивается по уровню, соответствующему значению μdj(X*); 2) агрегирование – полученные усеченные нечеткие множества объединяются с использованием операции нахождения максимума (s-нормировка), что выражается формулой (6); 3) дефаззификация – результирующее нечеткое множество ỹ, определенное выражением (6), преобразуется в четкое вещественное число y методом расчета координаты центра тяжести полученного распределения (метод центра тяжести, формула (2)).
 (6)
(6)
Выходом системы нечеткого вывода служит четкое численное значение переменной y* (1), рассчитываемое по заданным значениям входных параметров xi, кодирующих оценки факторов подсистем и интегральный показатель уровня БДД.
Программная реализация информационной системы, содержащей рассмотренные механизмы взаимодействия и алгоритмы учета межсистемных корреляций, была разработана с использованием универсального языка программирования Python, для которого характерны высокоуровневость, строгая динамическая типизация и автоматическое управление памятью.
Был разработан базовый пользовательский интерфейс, нацеленный на оптимизацию взаимодействия с программным комплексом. После реализации алгоритмов была проведена верификация работоспособности системы, в рамках которой оценивалось влияние расчетов для подсистемы «Водитель» на другие модули.
В ходе последующего развития проекта функциональность системы была расширена за счет реализации инструментов визуализации, обеспечивающих отображение результатов на всех этапах обработки данных. К визуализируемым результатам относятся:
− оценка состояния каждой подсистемы по значениям ее факторов без учета взаимовлияния;
− графики функций принадлежности факторов подсистем до применения механизма взаимовлияния (исходные функции принадлежности);
− оценка состояния каждой подсистемы после реализации механизма учета взаимовлияния;
− графики функций принадлежности факторов подсистем после применения механизма взаимовлияния;
− итоговая интегральная оценка уровня безопасности дорожного движения с отображением функции принадлежности результирующего показателя.
Для получения оценок состояния подсистем после ввода исходных данных требуется выполнить расчет, активировав соответствующую функцию («Результат»). При этом оценка подсистемы «Водитель» производится на заключительном этапе вычислительного процесса.
При автоматизированной интегральной оценке уровня БДД, исключающей учет взаимовлияния подсистем (рис. 1), итоговое значение формируется непосредственно после ввода исходных данных и расчета оценки для подсистемы «Водитель». Данный подход не требует итеративного пересчета состояний остальных подсистем.
Итерационный процесс вычисления, сопровождающийся корректировкой функций принадлежности вследствие низкого уровня оценки подсистемы «Водитель», инициирует каскадное снижение качественных показателей сопряженных подсистем, прямо способствуя ухудшению итогового интегрального индекса безопасности дорожного движения.
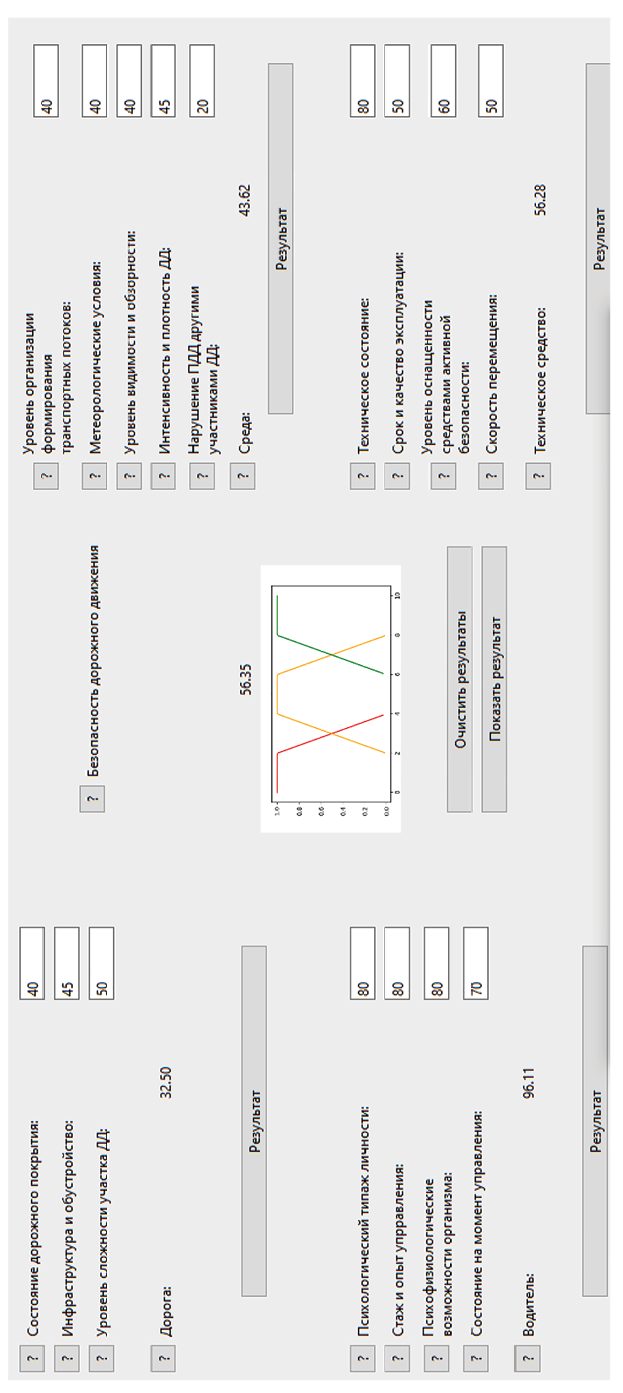
Рис. 1. Характеристика подсистем при увеличенном значении показателя «Водитель» и функциональная принадлежность фактора «Сложность дорожного движения» Примечание: составлен авторами на основе проведенного исследования
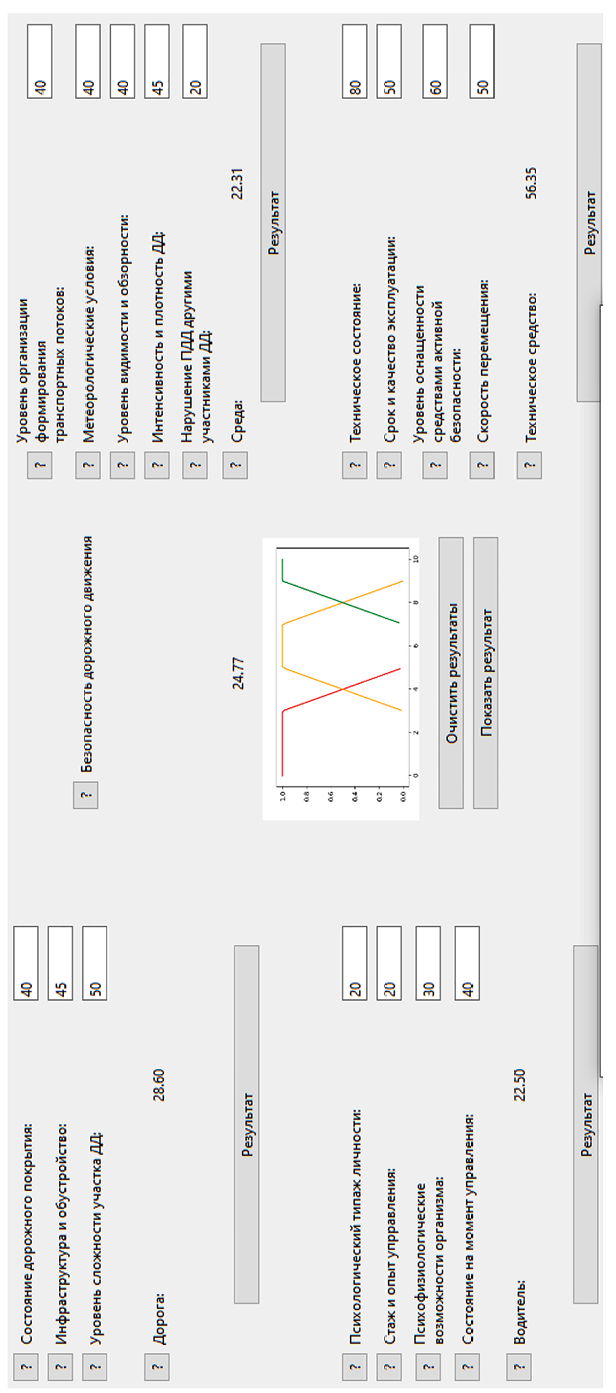
Рис. 2. Оценка подсистем при пониженном значении подсистемы «Водитель» и ФП фактора «Уровень сложности дорожного движения» Примечание: составлен авторами по результатам данного исследования
На рис. 2 показано, каким образом данные подсистемы «Водитель» влияют на формирование интегральной оценки БДД и на частные оценки других подсистем.
На основании изложенного разработанный механизм влияния отдельных факторов подсистемы «Водитель» на конкретные параметры других подсистем осуществляется путем динамической адаптации функций принадлежности лингвистических переменных соответствующих подсистем в зависимости от показателей частной оценки состояния подсистемы «Водитель».
Заключение
В рамках проведенного исследования был разработан и апробирован подход к автоматизированной интегральной оценке безопасности дорожного движения. Основным результатом работы является создание методики, сочетающей стандартные методы анализа аварийно опасных участков с усовершенствованными алгоритмами нечеткой логики.
Экспериментальная проверка предложенного подхода подтвердила его эффективность в решении задачи повышения точности расчетов. Учет расширенного набора детерминантов, влияющих на состояние подсистем дорожного движения, позволил получить более обоснованные и достоверные оценки уровня безопасности.
Практическая реализация методики в виде интеллектуальной экспертной системы демонстрирует возможность достижения синергетического эффекта от интеграции традиционных и современных методов оценки. Это открывает перспективы для создания более совершенных инструментов поддержки принятия решений в области организации и управления дорожным движением.
Conflict of interest
Библиографическая ссылка
Иващук О.Д., Нестерова Е.В., Маматов А.В., Федоров В.И., Удовенко И.В. Автоматизированная интегральная оценка безопасности дорожного движения // Современные наукоемкие технологии. 2025. № 11. С. 59-65;URL: https://top-technologies.ru/en/article/view?id=40567 (дата обращения: 01.08.2026).
DOI: https://doi.org/10.17513/snt.40567