


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
ORGANIZATION OF THE «VIRTUAL RAIL» TECHNOLOGY IN THE TRANSSHIPMENT PORT COMPLEX

Введение
В статье рассматривается технология «виртуальный рельс» как перспективное направление организации логистических работ. Данная технология представляет собой цифровую платформу, позволяющую синхронизировать действия всех участников логистической цепи (грузоотправителей, операторов, транспортных компаний). Представленная технология способствует улучшению координации между участниками логистической цепи, обеспечивая более быструю и точную обработку грузов. Это позволяет сократить время простоя и повысить общую эффективность работы порта.
Автоматизация процессов в перегрузочных портовых комплексах с использованием автоматизированных систем управления, таких как автоматические краны и транспортные средства, имеет несколько ключевых преимуществ и особенностей:
− снижение риска возникновения аварий;
− мониторинг текущего состояния;
− сбор данных.
Для решения задач управления логистическими процессами существует множество методов и подходов. Например, метод мультиагентной оптимизации является эффективным инструментом для решения сложных задач, таких как автоматизация распределения задач в порту. Этот метод основывается на использовании множества агентов, каждый из которых может принимать решения и взаимодействовать с другими агентами для достижения общей цели. В своей работе Д.А. Ромащенко [1] детально исследует создание современных систем реализации интеллектуального управления перегрузочными процессами в перегрузочных портовых комплексах. Авторами Чжоу Ицин, Ван Лу, Юань Цзиньхун, Ши Цзинлинь [2] рассмотрено «автономное вождение с виртуальными рельсами» для повышения безопасности и эффективности, которые определяются как траектории движения, и стратегии управления транспортными средствами. Транспортные средства можно отслеживать и контролировать на виртуальной железной дороге в режиме реального времени через сотовую сеть.
В данной работе представлено применение в перегрузочном портовом комплексе технологии «виртуальный рельс», которая предоставляет значительные преимущества для управления процессами перевалки контейнеров, обеспечивая более высокую эффективность и безопасность в логистике. Целью данного исследования является использование геоинформационной технологической системы «виртуальный рельс» для автономного технологического процесса перевалки контейнеров с учетом класса груза, массы и особых условий перевозки. Авторами предложено применять контрольно-корректирующие станции, выдающие дифференциально-фазовые поправки в системе навигации автономных средств, составляющих автоматизированную систему управления технологическими процессами (АСУ ТП) портовых перегрузочных комплексов.
Материалы и методы исследования
Технология «виртуальный рельс» в перегрузочных портовых комплексах подразумевает использование цифровых технологий и средств автоматизации для оптимизации процессов грузоперевозок и управления логистикой [3]. Рассмотрим ключевые аспекты этой технологии, представленные на рисунке 1.
Для реализации такой системы требуется интеграция различных технологий, включая трекеры GPS, лазерные датчики измерения расстояния (лидары) [4], программное обеспечение для обработки данных и реализации пользовательских интерфейсов [5].
Классическая технология динамического высокоточного позиционирования включает наблюдение не менее 4 спутников (рис. 2), с вычислением разностной частоты [6, 7]. За счет вычисления разности определяются позиции транспортных средств. Однако, если такое условие наблюдения не выполняется, то вычисленное положение окажется со значительной ошибкой.
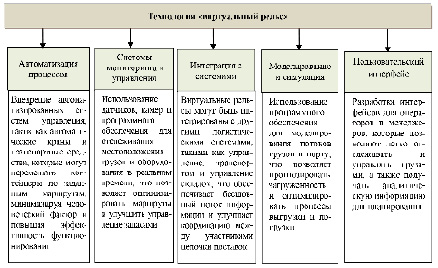
Рис. 1. Структура основных показателей технологии «виртуальный рельс» Источник: составлено авторами
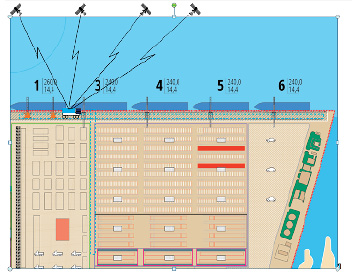
Рис. 2. Формирование технологического комплекса «виртуальный рельс» при видимости 4 спутников Источник: составлено авторами
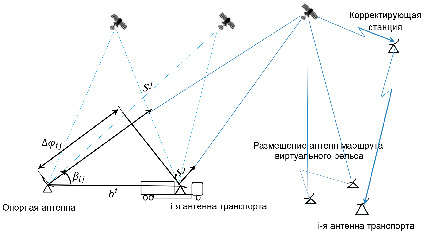
Рис. 3. Формирование технологического комплекса «виртуальный рельс» с корректирующей станцией Источник: составлено авторами на основе источников [7, 8]
С целью компенсации погрешностей определения значения разностных частот, принимаемых со спутника, целесообразно использовать специализированные корректирующие станции, в этом случае схема технологического комплекса типа «виртуальный рельс» будет иметь вид, представленный на рисунке 3.
Измерение псевдодальности происходит как измерение разности координат [9]:
 , (1)
, (1)
где в выражении (1) X, Y, Z – текущие координаты транспортного средства, Xi, Yi, Zi – значения координат спутника, c – скорость света; Δtn – погрешность определения частоты (называемая погрешностью времени), εDi – систематическая погрешность определения координат транспортного средства, к которой относят всевозможные виды погрешностей, допускающие их систематизацию и учет.
Вопрос точного позиционирования лежит в области определения погрешности частоты сигналов, передаваемых со спутника. Условие наблюдения 4 спутников связано с необходимостью учета погрешности времени. При различных методах определения достигается точность около 20 см. Однако при его использовании требуется учет неоднозначности измерений [10].
При использовании фазового метода наилучшие результаты удается получить с использованием допплеровского метода. Для этого необходимо определить измерение производной координат по частоте:
 , (2)
, (2)
где  – изменение центра приемной антенны по координате X,
– изменение центра приемной антенны по координате X,
 – изменение центра приемной антенны по координате Y,
– изменение центра приемной антенны по координате Y,
 – изменение центра приемной антенны по координате Z.
– изменение центра приемной антенны по координате Z.
Обычно контейнерные площадки не имеют уклонов и расположены в одном уровне [11]. Поэтому сигнал счисления фазового центра антенны по координате Y можно считать опорным. Условия распространения радиоволн, вызванные состоянием атмосферы, не изменяются мгновенно, поэтому погрешности, вызванные изменением частоты по каналу измерения координаты Y, можно считать опорными [12] .
Результаты исследования и их обсуждение
Построение технологического комплекса типа «виртуальный рельс» с использованием корректирующей станции позволяет записать погрешность определения фазы следующим образом [13]:
 , (3)
, (3)
при условии изменения базы измерений bi – фактическое расстояние между двумя антеннами, одну из которых принимаем основной (называемой опорной), вторую антенну считаем ведомой (размещенной на транспортном средстве). В (3) фазовым центром считаем геометрический центр антенн, βij – углы фокуса антенн и направления их на спутник; εij – обобщенная погрешность фазовых измерений частоты, λ – длина волны принимаемого сигнала; nij – целое число разности фаз частот (необходимо определять в целое число периодов).
Учитывая, что меняется угловое положение спутника, точность определения положения транспортного средства в связанной системе координат относительно положения спутника можно определить как вращения базового вектора положения фазового центра антенн, находящегося на транспортном средстве. Однако необходим учет поправок во времени, согласно (2), учитывающих фактическое изменение координат фазового центра антенны транспортного средства.
С этой целью учет фазового центра антенны в форме кватернионов примет вид:
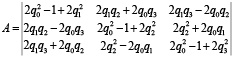 , (4)
, (4)
где q0, q1, q2, q3 – значения фазового вектора (в кватернионах), указывающие на положение транспортного средства, привязанного к фазовому центру расположенной на нем антенны.
 , а
, а  , (5)
, (5)
определение координат вектора через сопряженный кватернион:  ,
,
где Δq*– сопряженный кватернион.
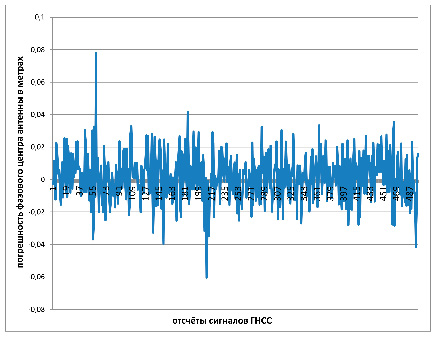
Рис. 4. Вычисление погрешностей определения фазового центра антенны, размещенной на транспортном средстве, по технологической схеме «виртуальный рельс»
Окончательно положение центра антенны, размещенной на транспортном средстве r, определяемом как изменение центра приемной антенны по координате Y (фактически изменение углового положения спутника вокруг оси вращения) Or, на угол φ:
 (6)
(6)
Учитывая поворот вектора на угол 2φ позиции фазового центра антенны, связанной с местом размещения на транспортном средстве, окончательный алгоритм можно представить как:
Si = Abi + vi, (7)
где vi – ошибки вычисления вектора Si, i = 1…3.
Многие контейнеры оснащаются трекерами отслеживания местоположения. С учетом размещения антенн «виртуального рельса» на местности в пределах контейнерного терминала определение маршрута автономного транспортного средства в пределах терминала происходит при совмещении метки размещения контейнера и транспортного средства (рис. 4).
Учитывая тот факт, что изменение (дрейф) характеристик происходит во всей системе определения положения системы «виртуальный рельс», учет производится по ошибке реального масштаба времени [13, 14].
Например, погрешность времени для сигналов GPS и BeiDou на трехчасовом периоде наблюдений составляет величины 0,53 нс и 0,64 нс. При определении позиции транспортного средства в пределах контейнерного терминала это незначительно скажется на точности вычисления позиций контейнеров и транспорта [15, 16].
Заключение
Предложенный подход интересен в отношении точности в управлении технологическими комплексами типа «виртуальный рельс». Данное решение «виртуальный рельс» позволяет определить позицию транспортного средства в пределах контейнерного терминала, что способствует более эффективному управлению процессами и ресурсами.
Библиографическая ссылка
Чжуан С.-., Шаветов С.В., Лу Ц.-. ОРГАНИЗАЦИЯ ТЕХНОЛОГИИ «ВИРТУАЛЬНЫЙ РЕЛЬС» В ПЕРЕГРУЗОЧНОМ ПОРТОВОМ КОМПЛЕКСЕ // Современные наукоемкие технологии. 2025. № 5. С. 91-96;URL: https://top-technologies.ru/en/article/view?id=40395 (дата обращения: 19.06.2026).
DOI: https://doi.org/10.17513/snt.40395