


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
SYNTHESIS OF THE INTELLECTUAL AUTOMATED CONTROL SYSTEM BY ELECTRIC POWER TRANSPORT ON ELECTRIC MAINS WITHIN THE SET THROUGHPUT

Введение
С внедрением современных информационных технологий в российскую энергетическую систему, противоаварийная автоматика (ПА) и системы автоматизированного диспетчерского управления (АСДУ) стали одними из самых развивающихся направлений, обеспечивающих надежность работы энергосистемы в целом. Применение интеллектуальных методов обработки данных открывает новые возможности для АСДУ и ПА в части автоматизации управления предаварийных и послеаварийных режимов [1]. Одним из остро нуждающихся в автоматизации режимов является вынужденный режим работы элементов энергосистемы (ЭС). Вынужденный режим – это режим, в котором нагрузка на элементе энергосистемы выше номинального значения, но ниже аварийной уставки срабатывания ПА [1, 2]. Несмотря на то, что такой режим считается допустимым, он должен быть кратковременным. Стандарт СТО 59012820.27010.005-2013 ОАО «СО ЕЭС» требует от диспетчера ликвидировать вынужденный режим за 40 мин [2]. В настоящее время диспетчерский персонал для ликвидации этого режима вынужден быстро предпринимать действия коммутационного характера (отключает часть потребителей) или вводит ограничения на энергопотребление [2].
В работе изложены результаты исследования по синтезу автоматизированной системы управления транспортом электроэнергии по линиям электропередач в пределах заданной пропускной способности (АСУПМ). Создание АСУПМ основано на знании величины регулирующего эффекта нагрузки (РЭН). Несмотря на то, что известно довольно много исследований по применению РЭН, практического развития они не получили, поскольку для корректных действий диспетчеру необходимы точные данные о величине и знаке коэффициента РЭН (КРЭН) конкретного узла энергосети [3–5]. Но с развитием теории и информационных технологий появляются технические средства, способные автоматически актуализировать изменение КРЭН [6, 7], и появляется возможность создания АСУПМ.
Цель исследования заключается в синтезе автоматизированной системы управления перетоком мощности по линии электропередач в пределах заданной пропускной способности и имитационному моделированию ее работы.
Материалы и методы исследования
Как было сказано выше, АСУПМ возможно реализовать на основе данных о РЭН. Если КРЭН положительный, то для снижения перетока мощности надо уменьшить напряжение, если же КРЭН имеет отрицательное значение, то напряжение надо увеличить [6], при КРЭН ≈ 0 изменение напряжения не повлияет на переток мощности [1]. Самыми распространенными способами управления уровнем напряжения в ЭС являются: изменение напряжения на выводах генераторов (АРВ); изменение числа витков у трансформаторов (РПН, ПБВ); изменение напряжения устройствами компенсации реактивной мощности (БСК или синхронными компенсаторами) [1]. На электростанции реализовать управление напряжением для реализации поставленной задачи технически невозможно, поэтому АСУПМ вырабатывает управляющие воздействия на контроллеры РПН или БСК [1]. Микропроцессорные устройства АРПН уже по своему основному предназначению выдают сигналы на регуляторы и поддерживают необходимый уровень напряжения, имеют полностью настроенные исполнительные механизмы регулирования напряжением, а самое главное, в них возможна перенастройка на различные алгоритмы работы и допустима установка пользовательской программы. На АРПН возможно возложить дополнительную функцию по управлению перетоком мощности на перегруженном элементе сети.
Учитывая наличие контроллера мониторинга КРЭН, создание автоматизированной системы управления перетоком мощности (АСУПМ) по линии электропередач в пределах заданной пропускной способности производится по структурной схеме (рис. 1).
АСУПМ включает в себя:
– источник данных напряжения и мощности (ХU, XP). Для мониторинга КРЭН необходимо использовать запротоколированные, приведенные к единой оси времени напряжение и мощность [6], взятые с автоматизированной системы управления технологическими процессами (АСУ ТП) или оперативно-измерительного комплекса (ОИК) или телеизмерении (ТИ) [6];
– контроллер мониторинга КРЭН [6, 7];
– регулятор;
– АРПН и/или АБСК [1].
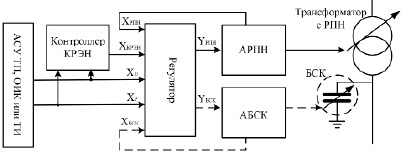
Рис. 1. Блок-схема функциональной структуры АСУПМ
Центральным элементом АСУПМ является регулятор. Проанализировав научные работы по автоматизации управления напряжением в узлах ЭС [8, 9], за основу взят нечеткий регулятор (НР).
Явными преимуществами при решении поставленной задачи являются:
– устойчивость процесса регулирования (робастность);
– быстродействие выше (НР – 4,3 с, ПИД – 9,5 с);
– у НР проще описание динамического процесса работы объекта регулирования.
Входными параметрами на входе регулятора являются: напряжение ХU, активная мощность ХР, коэффициент регулирующего эффекта нагрузки ХКРЭН, номер ступени РПН трансформатора ХРПН, номер ступени блока статических конденсаторов ХБСК. На выходе регулятора формируются дискретные управляющие сигналы YРПН и/или YБСК, принимающие значения -1, 0 или +1. Контроллер КРЭН с входными параметрами напряжения ХU и активной мощности ХР, мониторит изменения РЭН, выдавая на выходе КРЭН.
Работа регулятора содержит три этапа: фаззификации, логического заключения и дефаззификации.
Для лингвистических функций принадлежности приняты три обозначения: S (small) – параметр меньше номинала и для крайней низкой ступени регулирования; N (normally) – номинальное значение параметра и рабочее положение ступени регулирования; B (big) – параметр выше номинала и крайняя высокая ступень регулирования [1].
Диапазон регулирования определяется исходя из технических ограничений по возможному изменению уровня напряжений и находится в границах +15 % Uном [1].
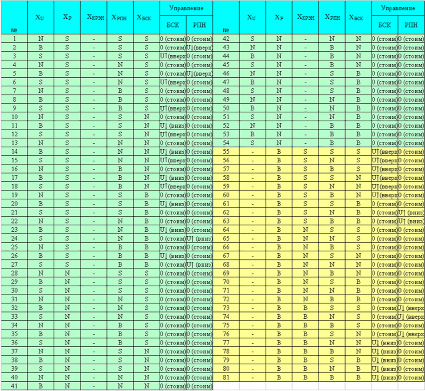
Рис. 2. База правил
Рис. 3. Блок-схема имитационной модели рабочего процесса АСУПМ
В процессе фаззификации применялись четыре вида функций принадлежности: z-подобная (zmf); s-подобная (smf); треугольная (trimf) и трапециевидная (trapmf).
При создании базы правил использовался алгоритм Мамдани [10]. Правило на базе алгоритма Мамдани выглядит как: ЕСЛИ «ХU= N» И « ХP = S « И «ХPЭН = N» И «ХРПН= N» И «ХБСК= N» ТО «УРПН = N (0 стоим)» И «УБСК = N (0 стоим)»
Применительно к решаемой задаче количество правил можно значительно уменьшить, если учесть особенности регулирования в различных режимах. При отсутствии перегрузки, то есть когда значение мощности «N» или «S», учет параметра ХPЭН можно исключить из базы правил. В этих режимах регулятор будет работать как регулятор напряжения. В режиме же перегрузки, когда значение мощности «B», можно исключить из базы правил учет параметра ХU, поскольку при перегрузке регулирование ведется на основе данных ХPЭН. Количество правил при этом сокращается с 243 до 81, что позволяет значительно упростить базу правил и обеспечить устойчивость работы АСУПМ. Все правила приведены в таблице (рис. 2), в которой желтым цветом выделены правила, работающие в режиме перегрузки.
При создании базы правил учитывалось, что переключение РПН на ступень «вверх» уменьшает напряжение на выводах трансформатора, переключение на ступень «вверх» БСК подключает группу конденсаторов, что увеличивает напряжение на выводах.
Первоначально управляющее воздействие выдается на АБСК и только после достижения номера крайней ступени, управляющее воздействие выдается на АРПН.
Численное значение управляющих параметров Y на выходе регулятора определяется путем дефаззификации нечеткого множества по методу центра тяжести.
Результаты исследования и их обсуждение
Для апробации основных положений, положенных в работу АСУПМ, была создана имитационная модель части ЭС с межсистемной линией связи 220 кВ. На линии со стороны энергодефицитной части ЭС установлен трансформатор 220/110 кВ с АРПН регулирующей напряжение 110 кВ. В энергодефицитной части ЭС имеются три крупные нагрузки, пять линий электропередач, две электростанции, КРЭН на узле присоединения межсистемной линии электропередач имеет ненулевое значение.
Модель энергосистемы с АСУПМ реализована в MatLAB Simulink (рис. 3), с пакетом Fuzzy Logic Toolbox, позволяющим имитировать работу АСУПМ.
Энергодефицитная часть энергосистемы на 110 кВ состоит из узлов 3, 4, 5, 6 с электростанциями (ЭС) в узлах 4, 6 нагрузкой в узлах 3, 4, 5. Между энергосистемой (узел 1) и энергодефицитной частью энергосистемы (узел 3) имеется межсистемная линия (ЛЭП 220 кВ) с трансформатором (Тр-р) к АРПН которого подключена АСУПМ.
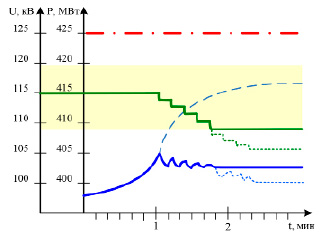
Рис. 4. Графики рабочего процесса АСУПМ
Напряжения в узлах следующие: во 2-м – 227,84 кВ, в 3-м – 113,98 кВ, в 4-м – 111,2 кВ, в 5-м – 111,03 кВ, в 6-м – 115,03 кВ. Суммарная потребляемая нагрузкой мощность – 509,59 МВт. Номинальный переток мощности по ЛЭП 220 кВ – 400 МВт, аварийно допустимый переток мощности по ЛЭП 220 кВ – 425 МВт. Имеется техническое ограничение по напряжению – не ниже 109 кВ, а также в модель введены временные параметры работы механизмов РПН с перерывом 1,5 с от одного переключения до другого для затухания коммутационных возмущений. График изменения напряжения и мощности при работе АСУПМ показан на рис. 4 [1].
Из рис. 4 видно, что, как только мощность потребления в энергодефицитной части энергосистемы достигла уровня перегрузки (405 МВт), АСУПМ на основе данных КРЭН выработал управляющее воздействие на РПН. Регулирование закончилось после пяти переключений, напряжение при этом достигло ограничения 109 кВ (узел 5), переток снизился до 402 МВт (3,7 %) [1]. АСУПМ работает до технического ограничения, то есть до достижения мощности нормального значения или до ограничения по напряжению или до достижения крайних значений ступеней переключения. Например, при отсутствии ограничения по напряжению АСУПМ отработал до нормального перетока мощности (400 МВт) после восьми переключений за 1 мин 55 с (штриховые линии на рис. 4) [1].
Заключение
Имитационное моделирование показало, что использование регулирующего эффекта нагрузки способно ограничить переток активной мощности на перегруженной межсистемной линии электропередач до 10 %.
Автоматизация процесса управления вынужденным режимом работы элемента энергосистемы значительно повышает его эффективность за счет сокращения времени работы с 40 до 2 мин и исключает коммутационные отключения потребителей.
Применение базы правил в работе нечеткого регулятора обеспечивает устойчивость рег
Библиографическая ссылка
Полищук В.И., Шувалова А.А. СИНТЕЗ ИНТЕЛЛЕКТУАЛЬНОЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ТРАНСПОРТОМ ЭЛЕКТРОЭНЕРГИИ ПО ЛИНИЯМ ЭЛЕКТРОПЕРЕДАЧ В ПРЕДЕЛАХ ЗАДАННОЙ ПРОПУСКНОЙ СПОСОБНОСТИ // Современные наукоемкие технологии. 2024. № 7. С. 34-39;URL: https://top-technologies.ru/en/article/view?id=40082 (дата обращения: 15.07.2026).
DOI: https://doi.org/10.17513/snt.40082