


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
DEVELOPMENT OF INFORMATION DEVICES OF SYSTEMS AUTOMATIC CONTROL

Информационные устройства (датчики) в системах автоматического управления технологическими процессами, как известно, предназначены для непрерывных измерений величины регулируемого параметра объекта с последующим преобразованием его в электрический сигнал [1–3].
В связи с этим к ним предъявляются повышенные требования, поскольку в целом от качества работы их зависят количественные показатели всей технической системы.
Основные требования, предъявляемые к информационным устройствам:
1) безопасность информационных уст- ройств;
2) высокая чувствительность;
3) возможность регулирования его коэффициента усиления;
4) стабильность характеристик;
5) нечувствительность к вибрациям, изменениям условий окружающей среды;
6) простота конструкций и надежность в работе и др.
С учетом этих требований нами были разработаны ряд информационных устройств для автоматических систем управления технологическими процессами при механической обработке изделий и обработке изделий давлением.
Как известно, в основе тензорезисторов лежит явление тензоэффекта. Характеристикой тензоэффекта материала является коэффициент относительной тензочувствительности K [1]:
 , (1)
, (1)
где  – относительное изменение сопротивления проводника;
– относительное изменение сопротивления проводника;  – относительное изменение длины проводника.
– относительное изменение длины проводника.
Cопротивление проводника определяется [1, 4–6]:
 (2)
(2)
где l – длина проводника;
S – площадь поперечного сечения проводника;
ρ – удельное сопротивление материала проводника.
С другой стороны,
 (3)
(3)
где r – радиус проволоки круглого сечения.
Учитывая, что  получаем
получаем
 (4)
(4)
т.е. коэффициент тензочувствительности
 (5)
(5)
где μ – коэффициент Пуассона  , где
, где  .
.
Коэффициент Пуассона μ для металлов имеет значение в пределах от 0,24 до 0,4, следовательно, коэффициент тензочувствительность для большинства металлов имеет следующие значения:  .
.
На рис. 1 приведена конструкция датчика давления для измерения давления в рабочей полости силового цилиндра гидросуппорта и его преобразование в электрический сигнал, который применяется в качестве измерительного информационного устройства в автоматической системе управления технологическим процессом при токарной обработке.
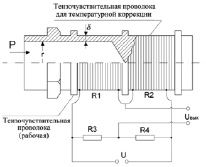
Рис. 1. Конструкция тензометрического датчика давления
Чувствительным элементом датчика является проволока, которая растягивается при изменении давления P в рабочей полости силового цилиндра гидросуппорта.
Величина относительного удлинения проволоки при толщине трубки датчика δ и внутреннем радиусе r под действием давления P может быть определена по известной формуле:
 (6)
(6)
где Е – модуль упругости материала датчика; μ – коэффициент Пуассона.
Тарировочная характеристика тензометрического датчика была получена на универсальном гидростенде УГ-1. С помощью напорного золотника Г54 задавались различные значения давлений по показаниям образцового манометра, а измерение выходного тока производилось амперметром.
На рис. 2 представлена тарировочная характеристика датчика давления, в которой  где
где  – коэффициент усиления датчика давления.
– коэффициент усиления датчика давления.
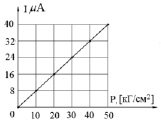
Рис. 2. Зависимость выходного тока датчика при различных значениях давления
Для оценки стабильности подачи инструмента гидросуппорта, а также исследования динамических характеристик исполнительных органов разработанных автоматических систем был разработан совместно с к.т.н. Ф.И. Юнусовым индукционный датчик с большим ходом, принципиальная конструкция его представлена на рис. 3.
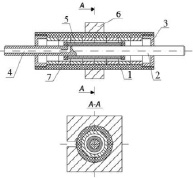
Рис. 3. Конструкция индукционного датчика
Индукционный датчик устанавливается параллельно с силовым цилиндром гидросуппорта станка, и его подвижная часть – корпус 1 – соединёна с силовым цилиндром [3].
Основные детали индукционного датчика: корпус 1, сердечник 2, набор магнитных втулок 7, крышки 3, индукционная катушка 5 и муфта 6.
Сердечник 2 – металлический стержень, свободно перемещающийся внутри корпуса. Концентричность расположения осей сердечника и корпуса осуществляется с помощью двух крышек 3.
На сердечнике намотана индукционная катушка из медной проволоки диаметром 0,2 мм, концы которых выведены через отверстие 4 в торец сердечника и могут подключаться к соответствующему усилителю или измерительным приборам.
Муфта 3 при помощи кронштейна жёстко скрепляется с цилиндром гидросуппорта.
Техническая характеристика индукционного датчика дана в таблице.
Характеристика индукционного датчика
|
Габаритные размеры |
|
|
Длина, мм |
1000 |
|
Диаметр корпуса, мм |
60 |
|
Вес, кг |
4,7 |
|
Техническая характеристика |
|
|
Диапазон измерения скорости, м/мин |
0,03÷2 |
|
Число витков катушки |
600 |
|
Выходное напряжение, мВ |
1÷100 |
Датчик скорости тарировался на токарном станке 1К62, неподвижная часть его крепилась в центрах станка, а подвижная была прикреплена к суппорту станка.
Суппорту станка задавались различные значения скорости и при каждом значении фиксировались показания тока амперметром, по результатам измерения были построены его тарировочная характеристика, представленная на рис. 4, в которой  где
где  – коэффициент усиления датчика скорости.
– коэффициент усиления датчика скорости.
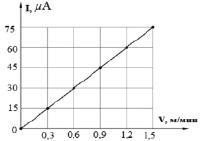
Рис. 4. Зависимость выходного тока датчика от скорости перемещения суппорта
Для системы стабилизации величины радиальной составляющей силы резания Py, от постоянства которой зависит качество изготовления изделия на токарном станке, был разработан динамометрический резцедержатель с пьезоэлектрическим преобразователем, конструктивная схема которого показана на рис. 5, а принципиальная схема – на рис. 6.
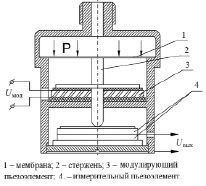
Рис. 5. Конструктивная схема пьезоэлектрического датчика
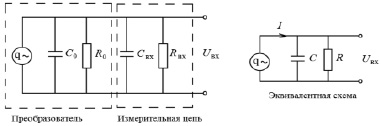
Рис. 6. Электрическая схема пьезоэлектрического преобразователя
При возникновении сил на мембране 1 (рис. 5), жёстко закреплённый с ним стержень 2, воздействует на моделирующую пластину 3, которая колеблется с постоянной частотой 50 Гц, так как к ней подводится переменное напряжение из сети. С пластин 4 снимается выходной сигнал датчика.
На принципиальной схеме (рис. 6) C0 – ёмкость между гранями пьезоэлектрика – ёмкость преобразователя; Cвх – ёмкость кабеля – входная ёмкость измерительной цепи; R0 – сопротивление преобразователя с учётом сопротивления изоляции линии относительно земли; Rвх – входное сопротивление измерительной цепи; q – величина заряда, равная q = d1 Py1, где d1 – постоянный коэффициент.
Сопротивление эквивалентной схемы
 (7)
(7)
Ёмкость – C = C0 + Cвх.
Выходное напряжение преобразователя с подключенной измерительной цепью равно
 (8)
(8)
где ω – частота изменения силы Py.
На рис. 7 представлен разработанный нами динамометрический резцедержатель с пьезоэлектрическим преобразователем для измерения радиальной составляющей силы резания. На этом же рисунке представлены все элементы и детали динамометрического резцедержателя для измерения радиальной составляющей силы резания при токарной обработке с соответствующими основными его размерами.
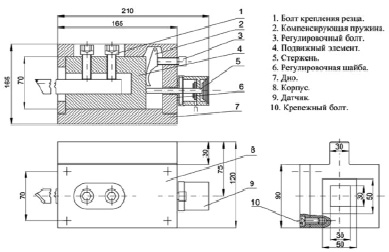
Рис. 7. Динамометрический резцедержатель с пьезоэлектрическим преобразователем
Динамометрический резцедержатель своим корпусом 8 закрепляется на суппорте токарного станка. В его подвижный элемент 4 устанавливается резец и закрепляется болтами 1. Пружина 2 и регулировочный болт необходимы для предварительной настройки преобразователя.
В процессе резания подвижный стержень 5 под действием силы резания оказывает воздействие на чувствительный элемент датчика 9, что приводит к появлению соответствующего электрического сигнала на его выходе.
Тарировка датчика.
На станке 1К62 закрепляется обрабатываемая деталь, к ней подводится измерительный стержень индикатора часового типа, а динамометрический резцедержатель без резца, его заменяет упор, который плавно подводится к поверхности детали, используя ручную подачу суппорта, осуществляя деформацию её до значения 1/3 допуска на упругие деформации, после чего ключом осуществляем поворот регулировочного болта до положения, при котором жёсткость пружины 2 станет меньше жёсткости детали.
Такая тарировка производится для случая обработки детали, когда её длина значительно больше, чем её диаметр, т.е. жёсткость её ниже жёсткости станка.
В случае, когда жёсткость детали выше жёсткости станка, тарировка производится следующим образом: образцовый динамометр и динамометрический резцедержатель с индикатором вместо датчика устанавливается в тиски. Плавным поворотом ходового винта тисков производится снятие тарировочных характеристик.
Пьезоэлектрический преобразователь является генераторным, его входная величина – сила, а выходная – количество электричества.
Выводы
1. Разработаны оригинальные конструкции информационных устройств: тензометрический датчик давления, индукционный датчик скорости и динамометрический резцедержатель, предназначенные соответственно для измерения давления в гидросистемах, скорости перемещения исполнительных органов оборудования и радиальной составляющей силы резания при токарной обработке с последующим преобразованием этих параметров в электрический сигнал.
2. Разработанные информационные уст- ройства применимы в автоматических системах управления как измерительные устройства, а также они могут быть использованы в экспериментальных исследованиях в качестве датчиков.
Библиографическая ссылка
Кадыров И.Ш., Темирбеков Ж.Т., Турусбеков Б.С., Давлятов У.Р. РАЗРАБОТКА ИНФОРМАЦИОННЫХ УСТРОЙСТВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ // Современные наукоемкие технологии. 2020. № 2. С. 25-29;URL: https://top-technologies.ru/en/article/view?id=37909 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.37909