


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
VACUUM ACTUATORS OF CURVILINEAR MOTION

В современном машиностроении и приборостроении широко применяются приводные механизмы криволинейного перемещения, которые используются в качестве силовых приводов, а также информационных и управляющих устройств гидро- и пневмоавтоматики. Одним из известных и распространенных механизмов криволинейного перемещения является пневмомеханический преобразователь, изобретенный Эженом Бурдоном [1] («трубка Бурдона»), в котором используются упругие свойства камеры-трубки для получения криволинейных перемещений под воздействием давления рабочей среды. Конструкции, способы и принципы работы данных механизмов постоянно совершенствуются.
Применение новых инновационных материалов [2] при изготовлении трубчатых устройств позволяет им работать в стерильных условиях со средами практически любой агрессивности на химических и фармацевтических предприятиях. Выполнение трубок с применением сетчатых оболочек [3] расширяет их функциональные возможности, обеспечивая формирование требуемой траектории криволинейного перемещения.
Разработка диафрагменных, сильфонных типов упругих пневмомеханических преобразователей [4] позволила совершенствовать принципы их работы. Так, например, в сильфонном преобразователе [5] реализация криволинейного перемещения осуществляется с использованием упругой деформации гофров, которые изготавливаются неосесимметричными.
Однако во всех этих устройствах криволинейное перемещение осуществляется только по одной радиальной траектории, определяемой заранее заданными упругими характеристиками применяемой оболочки, что ограничивает область их применения и не позволяет их применять в устройствах, в которых требуется её адаптация к изменяющимся условиям функционирования.
Разработан новый привод криволинейного перемещения с расширенной областью применения, в котором радиальное направление траектории задается в процессе функционирования [6]. Для реализации указанного процесса предложено шарнирное соединение стержней охватывать оболочкой, образующей герметичную камеру, выполненную с возможностью соединения с источником пневмопитания. В исходном положении стержни и камера занимают симметричное относительно оси положение. Направление криволинейного перемещения задается первоначальным перекосом взаимного расположения стержней. При соединении камеры с линией питания разреженного воздуха оболочка сжимается, создавая крутящий момент поворота стержней.
Макетирование, проведение натурных экспериментов подтвердили работоспособность данных устройств. Однако отсутствие параметрических исследований, сравнительного анализа не позволяет судить об их эффективности.
Цель исследования: повышение эффективности работы пневматических приводов путем разработки и исследования новых пневмомеханических преобразователей с адаптацией направления криволинейного перемещения.
Материалы и методы исследования
Объектом исследования является эффективность функционирования пневматических приводов. В качестве предмета исследования приняты вакуумные приводы криволинейного перемещения.
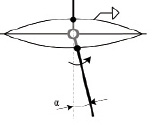
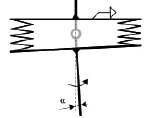
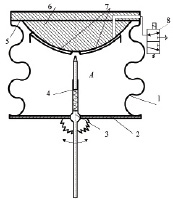
Для реализации поставленной цели проведены натурные параметрические исследования вакуумных приводных механизмов с вариантами исполнения камеры (рис. 1), образованной:
а) двумя диафрагмами, соединенными по периметру между собой (рис. 1, а);
б) двумя диафрагмами, соединенными между собой через гофрированную цилиндрическую часть (рис. 1, а);
в) сильфоном с закрытыми торцевыми поверхностями заглушками (рис. 1, в).
Материал камеры резина ИРП – 1266; толщина 1 мм; диаметр камеры 80 мм.

а) б)

в) г)
Рис. 1. Вакуумные приводные механизмы криволинейного перемещения: а), б), в) соответственно схемы диафрагменного, сильфонно-диафрагменного, сильфонного механизмов; г) общий вид сильфонно-диафрагменного привода
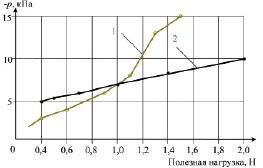
Рис. 2. Графики момента начала поворота стержня вакуумных диафрагменных приводных механизмов: 1 – диафрагменного; 2 – сильфонно-диафрагменного
Проведенные натурные исследования подтвердили работоспособность приводов криволинейного перемещения с диафрагменным и сильфонным исполнениями камер. Характер силового усилия диафрагменным и сильфонно-диафрагменным приводами на рабочий орган в зависимости от величины давления пневмопитания показан на рис. 2.
Графики показывают, что исполнение диафрагменной камеры с гофрами позволяет повысить крутящий момент привода.
На рис. 3 показан характер силовых характеристик сильфонного привода криволинейного перемещения.
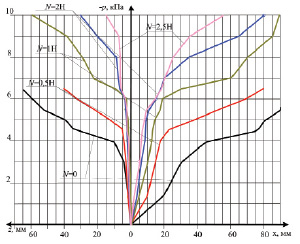
Рис. 3. Графики перемещения рабочего органа привода, выполненного с двумя шарнирно соединенными между собой стержнями: Z, х – положение стержня соответственно по вертикальной и горизонтальной оси; p – пневмодавление в рабочей камере; N – полезная нагрузка
Графики показывают, что сильфонный приводной механизм по сравнению с диафрагменным при тех же самых габаритных параметрах обладает более высокими силовыми характеристиками.
Результаты исследования и их обсуждение
Исследования показали, что приводные механизмы криволинейного движения, в которых используются диафрагмы, обладают низкими силовыми характеристиками. Это объясняется тем, что с повышением давления разрежения воздуха в камере поверхности оболочки соединяются, начиная с периферийной части, и уменьшается её эффективная площадь. Кроме этого, выявлен существенный недостаток данных приводов криволинейного перемещения, который заключается в их высокой чувствительности к боковому силовому воздействию на рабочий орган, что негативно влияет на обеспечение сохранения заданного направления перемещения.
Для устранения выявленных недостатков предложена идея повышения силовых характеристик путем разработки вакуумного сильфонного привода с ограничением отклонения рабочего органа от заданного направления криволинейной траектории.
Данная идея реализована в устройстве, показанном на рис. 4.

а) б)
Рис. 4. Вакуумный сильфонный приводной механизм: а) схема устройства; б) общий вид
В приводе криволинейного перемещения (рис. 4, а) одна торцевая поверхность сильфона 1 закрыта первой заглушкой 2, в которой закреплен подпружиненный в среднем положении стержень 3. Часть 4 стержня, расположенная внутри сильфона, выполнена в телескопическом исполнении и подпружинена в сторону выдвижения. Другая торцевая поверхность сильфона закрыта второй заглушкой 5. Поверхность второй заглушки внутри сильфона выполнена в виде бобышки 6, на которой установлены радиальные направляющие 7. Сильфон и заглушки образуют герметичную полость А, выполненную с возможностью соединения через распределитель 8 с линией питания разряжения воздуха.
В исходном положении полость А соединена через распределитель с атмосферой.
Перед началом работы поворачивают стержень 3, перекашивая его положение относительно заглушки 2, задавая тем самым направление требуемого криволинейного перемещения. Создание давления разрежения в полости А приводит к сжатию и перекосу сильфона и повороту стержня в заданном направлении. Изменению траектории заданного криволинейного перемещения от влияния возможных боковых силовых воздействий противодействуют радиальные направляющие 7, по которым перемещается часть 4 стержня 3.
Характер силового перемещения рабочего органа в зависимости от величины давления пневмопитания показан на рис. 5.
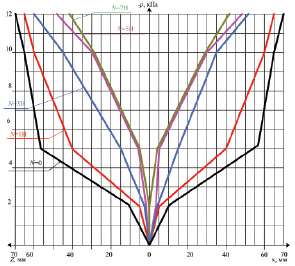
Рис. 5. Графики перемещения рабочего органа в зависимости от давления пневмопитания и величины полезной нагрузки: Z, х – положение стержня соответственно по вертикальной и горизонтальной оси; p – пневмодавление в рабочей камере; N – полезная нагрузка
Графики показывают, что исполнение камеры, выполненной в виде сильфона и установленного в нем стержня, взаимодействующего с радиальными направляющими, позволяет повысить силовые характеристики привода. При этом направляющие устраняют возможность изменения заданного радиального направления криволинейного перемещения.
Заключение
Таким образом, анализом конструкций, принципов, методов и способов работы вакуумных камерных приводов, использующих для реализации криволинейного перемещения упругие свойства оболочки, выявлены недостатки, связанные с их функциональными возможностями. Криволинейное перемещение осуществляется только в одном, конструктивно заданном радиальном направлении, что ограничивает область их применения. Предложены идеи и новые устройства для их реализации, в которых направление криволинейного перемещения задается внешними условиями функционирования привода, например, при коррекции положения сопрягаемых осесимметричных деталей.
Макетированием, проведением натурных исследований разнообразного исполнения камер приводов данного типа установлено, что наиболее эффективным по создаваемым усилиям является вакуумный одностержневой сильфонный привод криволинейного перемещения. Кроме этого, в разработанном новом приводе устранена возможность изменения направления заданной траектории криволинейного перемещения от возможных боковых силовых воздействий.
Библиографическая ссылка
Сысоев С.Н., Овчинников В.А., Цаплин Р.О. ВАКУУМНЫЕ ПРИВОДЫ КРИВОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ // Современные наукоемкие технологии. 2020. № 1. С. 47-51;URL: https://top-technologies.ru/en/article/view?id=37898 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.37898